CANoe 报文仿真
文章目录
- 一、单个/少数报文仿真
- 1、Canoe 发送报文
- 2、可以自定义该报文发送节点
- 3、添加报文
- 4、触发方式
- 二、ECU节点仿真
- 1、导入DBC,添加节点
- 2. 选择节点中的哪些报文可以发送
- 3. 更新ECU 节点发送的报文数据
- 三、开始仿真
- 激活/失效该 ECU节点
一、单个/少数报文仿真
1、Canoe 发送报文
右键点击如下图选择insert CAN Interactive Generators(插入CAN的交互生成器)。


2、可以自定义该报文发送节点
3、添加报文
双击增加的 ECU节点,进入如下界面

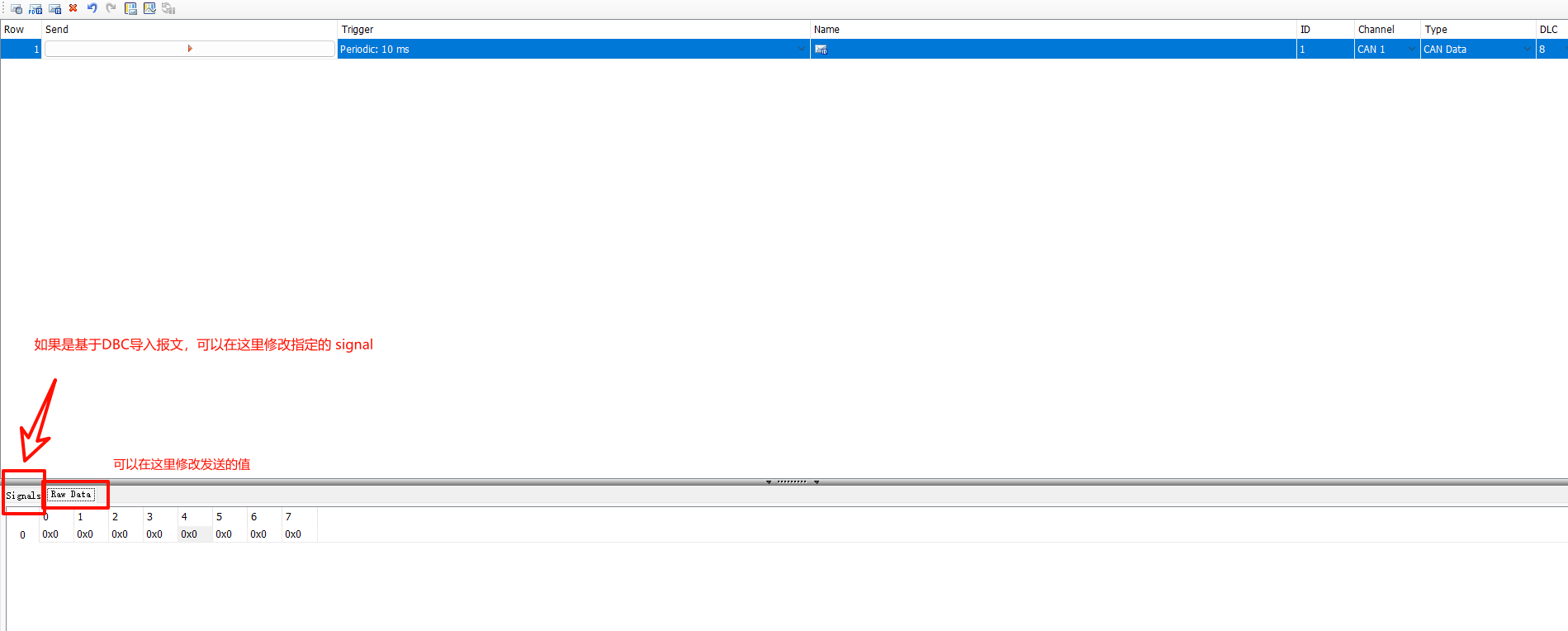
4、触发方式
在Trigger下面有触发方式
-
1、
Manual 手动触发,类似于等待,点击发送 -
2、
on key 按键触发,绑定其他能触发按键的一个动作进行发送 -
3、
Periodic 周期触发,配置时间,按时间发送
二、ECU节点仿真
1、导入DBC,添加节点
右键Databases 选择

其中Add是仅添加DBC文件,Import不仅添加DBC文件,还可以将DBC中定义的节点进行加载到CANoe的CAN线上。


如果导入的时候未选择按导入节点,也可以选择DBC,重新添加节点:

2. 选择节点中的哪些报文可以发送
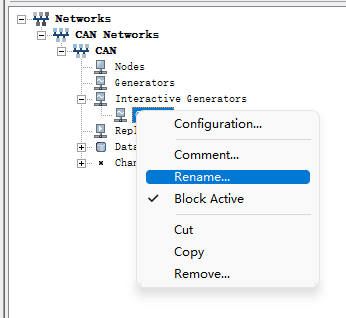
右键 VCU节点,选择Open IL Configuration...

勾选需要发送的信号:

3. 更新ECU 节点发送的报文数据
点击此图标进入数据修改界面:


三、开始仿真
点击闪电按钮(Start)会弹出让我们选择所用硬件通道,如有硬件,选择与产品相连的CAN通道即可,没有硬件的话也可以使用虚拟通道(Virtual CAN BUS):

选择完成之后点击OK即可启动工程。
考虑到不是每个读者都有硬件,以下暂时以无硬件仿真进行讲解。
在home目录下,点击Real Bus旁边的小箭头,切换到SimulationBus模式进行离线仿真

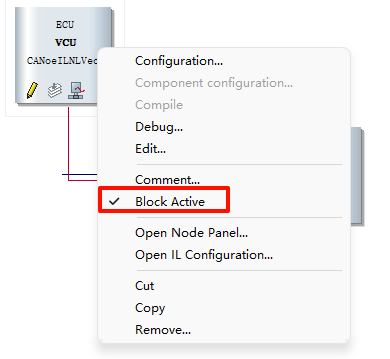
激活/失效该 ECU节点