海康面阵、线阵、读码器及3D相机接线说明
为帮助用户快速了解和配置海康系列设备的接线方式,本文将针对海康面阵相机、线阵相机、读码器和3D相机的主要接口及接线方法进行全面整理和说明。

一、海康面阵相机接线说明
海康面阵相机使用6-pin P7接口,其功能设计包括电源输入、光耦隔离信号输入输出,以及GPIO通用接口。
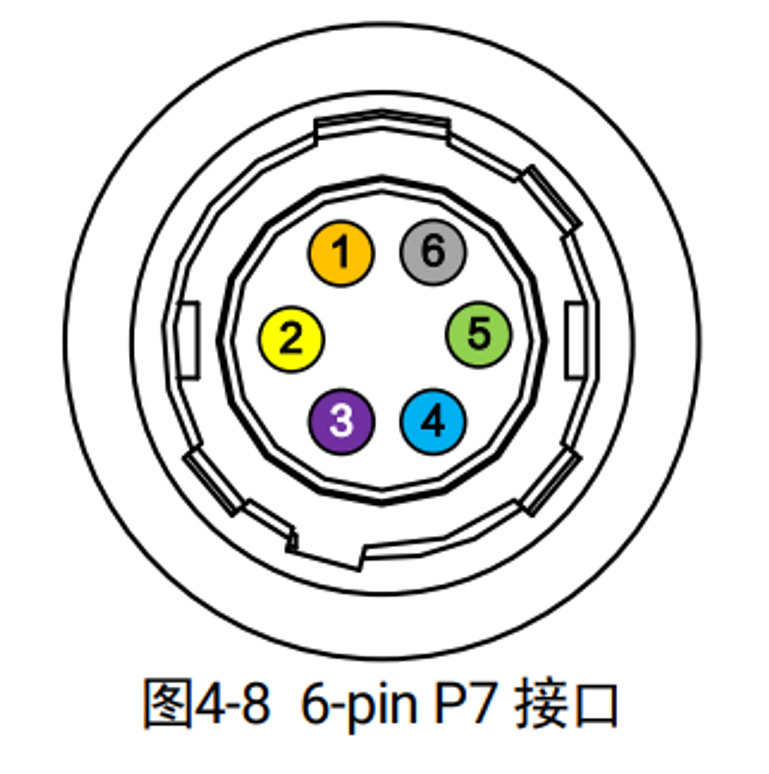
1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 橙 | DC_PWR | – | 相机电源 |
| 2 | 黄 | OPTO_IN | Line 0+ | 光耦隔离输入 |
| 3 | 紫 | GPIO | Line 2+ | 可配置输入或输出 |
| 4 | 蓝 | OPTO_OUT | Line 1+ | 光耦隔离输出 |
| 5 | 绿 | OPTO_GND | Line 0-/1- | 光耦隔离信号地 |
| 6 | 灰 | GND | Line 2- | 相机电源地 |
2. 接线说明
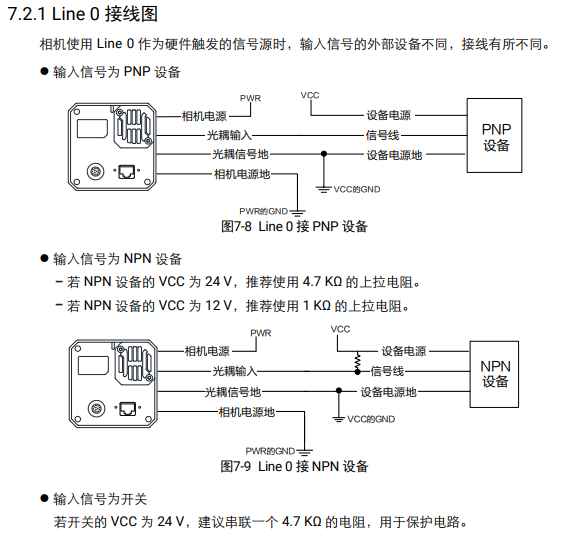
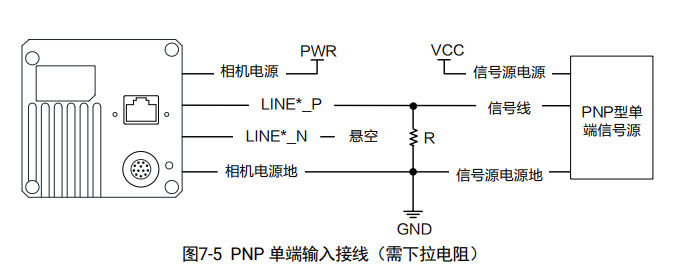
- PNP输入设备接线:输入信号为PNP设备时,VCC需接24V,并通过4.7kΩ上拉电阻稳定信号。
- NPN输入设备接线:NPN设备VCC为12V时,推荐使用1kΩ上拉电阻。
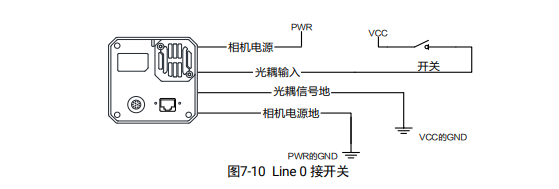
- 开关信号输入接线:输入信号接开关时,建议串联4.7kΩ电阻保护电路。
二、海康线阵相机接线说明
海康线阵相机采用12-pin P10接口,支持多路差分输入输出信号。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 黑 | GND | – | 电源地 |
| 2 | 红 | DC_PWR | – | 直流电源正 |
| 3 | 白/蓝 | LINE0_P | Line 0+ | 差分输入输出IO 0 正 |
| 4 | 白/橙 | LINE0_N | Line 0- | 差分输入输出IO 0 负 |
| 5 | 白 | GND | – | 电源地 |
| 6 | 白/绿 | LINE3_P | Line 3+ | 差分输入输出IO 3 正 |
| 7 | 橙 | LINE3_N | Line 3- | 差分输入输出IO 3 负 |
| 8 | 棕 | LINE4_P | Line 4+ | 差分输入输出IO 4 正 |
| 9 | 灰 | LINE4_N | Line 4- | 差分输入输出IO 4 负 |
| 10 | 蓝 | LINE1_P | Line 1+ | 差分输入输出IO 1 正 |
| 11 | 紫 | LINE1_N | Line 1- | 差分输入输出IO 1 负 |
| 12 | 黄 | LINE4_N | Line 4- | 差分输入输出IO 4 负 |
2. 接线说明
- PNP输入设备:信号正极接VCC,通过4.7kΩ电阻连接。
- NPN输入设备:推荐1~10kΩ上拉电阻以稳定信号。

- 差分输出设备:差分信号正负端分别接外部设备对应正负端。


三、海康读码器接线说明
海康读码器使用12-pin M12接口,提供光耦隔离输入输出及串口通信功能。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 白 | DC_PWR | – | 直流电源正 |
| 2 | 棕 | GND | – | 电源地 |
| 3 | 绿 | OPTO_OUT3 | I/O隔离输出3 | 输出信号3 |
| 4 | 黄 | OPTO_OUT4 | I/O隔离输出4 | 输出信号4 |
| 5 | 灰 | OPTO_OUT5 | I/O隔离输出5 | 输出信号5 |
| 6 | 粉 | OUT_COM | 输出信号公共地 | 输出共端 |
| 7 | 蓝 | OPTO_IN0 | I/O隔离输入0 | 输入信号0 |
| 8 | 红 | OPTO_IN1 | I/O隔离输入1 | 输入信号1 |
| 9 | 橙 | OPTO_IN2 | I/O隔离输入2 | 输入信号2 |
| 10 | 紫 | IN_COM | 输入信号公共地 | 输入共端 |
| 11 | 灰/粉 | RS-232_R | – | 232串口输入 |
| 12 | 红/蓝 | RS-232_T | – | 232串口输出 |
2. 接线说明
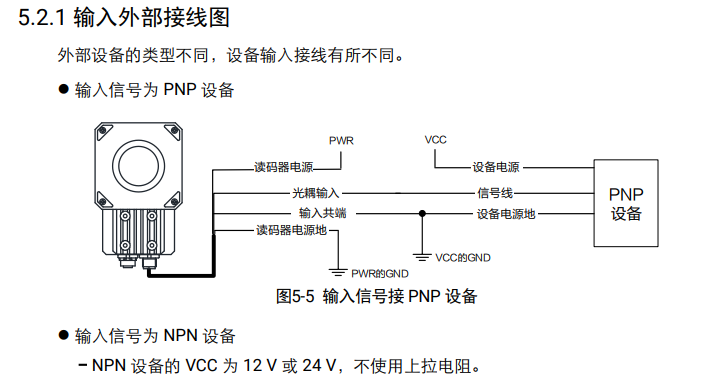
- PNP输入设备:信号线与VCC接入。
-
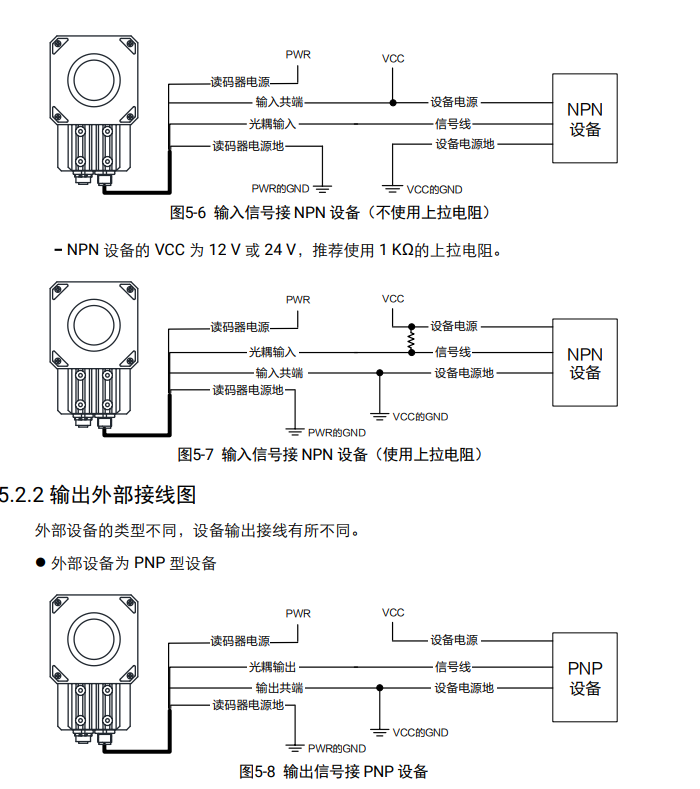
NPN输入设备:12V或24V时,建议串联1kΩ电阻稳定信号。
-
光耦隔离输出:通过OUT_COM公共端连接信号设备输入端。
四、海康3D相机接线说明
海康3D相机采用12-pin M12接口,支持差分信号输入输出及RS-232串口通信。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 白 | POWER_IN | – | 直流电源正 |
| 2 | 棕 | GND | – | 电源地 |
| 3 | 绿 | IO_OUT1_P | Line 1+ | 差分输出IO 1正 |
| 4 | 黄 | IO_OUT1_N | Line 1- | 差分输出IO 1负 |
| 5 | 灰 | IO_IN0_N | Line 0- | 差分输入IO 0负 |
| 6 | 粉 | IO_IN0_P | Line 0+ | 差分输入IO 0正 |
| 7 | 红 | IO_IN3_P | Line 3+ | 差分输入IO 3正 |
| 8 | 黑 | IO_IN3_N | Line 3- | 差分输入IO 3负 |
| 9 | 蓝 | IO_IN6_N | Line 6- | 差分输入IO 6负 |
| 10 | 紫 | IO_IN6_P | Line 6+ | 差分输入IO 6正 |
| 11 | 灰/粉 | 232_RXD | – | 232串口输入 |
| 12 | 红/蓝 | 232_TXD | – | 232串口输出 |
2. 接线说明
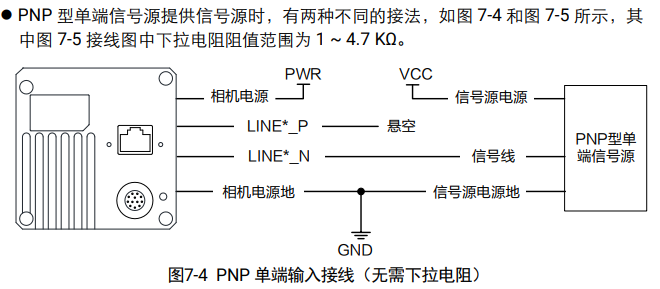
-
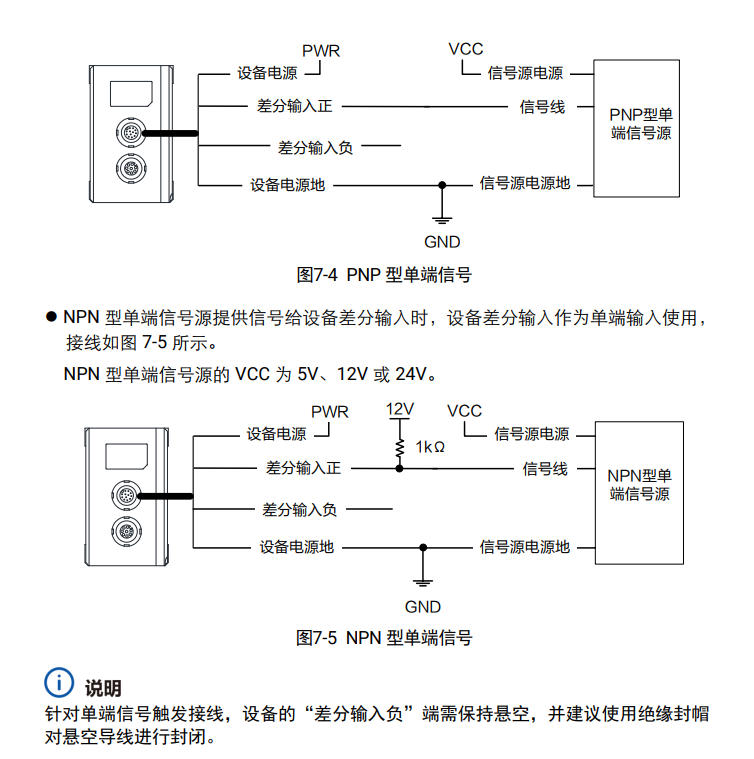
PNP单端信号:信号正极接差分正端,负端悬空绝缘。
-
NPN单端信号:串联1kΩ电阻连接差分正端,负端悬空。

总结
海康系列相机和读码器的接线方式灵活,涵盖多种信号输入输出需求。用户在接线过程中需特别注意以下几点:
- 根据设备类型选择适配的输入输出模式(PNP或NPN)。
- 使用推荐的电阻值保护电路,确保信号稳定。
- 正确连接电源和地线,避免损坏设备。
以上信息为海康设备的接线配置提供了全面参考,助力用户高效完成设备连接与调试。