Diffusion【2】:VAE
系列文章目录
文章目录
- 系列文章目录
- 前言
- 1. Abstract
- 2. Introduction
- 2.1. Motivation
- 2.2. Contribution
- 3. Methods
- 3.1. Problem Scenario
- 3.2. The variational bound
- 3.3. The SGVB estimator and AEVB algorithm
- 3.3.1. Stochastic Gradient Variational Bayes Estimator
- 3.3.2. Auto-Encoding Variational Bayes
- 3.4. The reparameterization trick
- 3.4.1. Trick
- 3.4.2. Example
- 3.4.3. Scope
- 总结
前言
VAE 可以说是最近大热的生成模型的重要基石。本文侧重对论文内容的翻译和一定程度上的解释。若想完全弄懂 VAE 的具体流程和数学公式推导,建议大家移步苏剑林老师的博客。
原论文链接:Auto-Encoding Variational Bayes
原论文链接:苏神博客
1. Abstract
本文主要探讨了在概率模型中处理潜在变量推断的难点。传统方法难以处理以下两种主要情况:
- 后验分布的不可解性:当模型的后验分布无法通过解析或简单的数值方法计算时,标准方法如期望最大化(EM)或常规变分贝叶斯方法可能无法适用。
- 大规模数据处理:面对大规模数据集时,传统的批量优化或采样方法(如MCMC)变得计算代价高昂。
为了解决上述问题,作者提出了 随机梯度变分贝叶斯估计器(SGVB) 和 自动编码变分贝叶斯算法(AEVB):
- SGVB:通过重新参数化的技巧,将随机变量的采样过程转化为可微函数,这样可以使用高效的随机梯度方法进行优化。
- AEVB:结合 SGVB,用一个神经网络训练的识别模型去近似后验分布,从而实现对潜在变量的高效推断和生成模型参数的高效学习。
意义:
- 效率提升:算法规避了传统推断方法的复杂计算,尤其适用于连续潜在变量的模型。
- 多功能性:学习到的识别模型不仅可以进行后验推断,还能用于数据重建、降噪、表示学习和可视化。
2. Introduction
2.1. Motivation
定向概率模型中的推断与学习是一个难题,尤其是当涉及连续潜在变量时:
- 后验分布往往无法直接求解(不可解)。
- 需要优化的目标通常非常复杂,例如在大数据场景中批量优化计算开销高昂。
传统的变分贝叶斯方法(VB)通过用近似分布替代真实后验分布,并优化这一近似分布来解决问题。但这一方法通常依赖解析计算,其适用性受到限制。
2.2. Contribution
本文的主要贡献:
- 提出 SGVB:通过重新参数化,将不可微的随机采样操作替换为可微的操作,从而可以对目标函数求导并优化。
- 提出 AEVB:利用 SGVB 优化一个称为“识别模型”的神经网络,这个模型能够高效地近似后验分布。
- 通过识别模型,可以高效地对每个数据点的潜在变量进行采样推断,而无需依赖传统的复杂方法(如 MCMC)。
- 这种方法既适用于模型参数的优化,也可以生成与原始数据类似的人工数据。
3. Methods
3.1. Problem Scenario
考虑一个数据集 X = { x ( i ) } i = 1 N X = \{ x^{(i)} \}_{i=1}^N X={x(i)}i=1N,包含 N N N 个独立同分布的样本,每个样本 x ( i ) x^{(i)} x(i) 可以是连续或离散的。我们假设数据是通过一个随机过程生成的,该过程涉及一个未观察到的连续随机变量 z z z。生成过程包括两个步骤:
- 先验采样:从某个先验分布 p θ ∗ ( z ) p_{\theta^*}(z) pθ∗(z) 中生成一个潜在变量样本 z ( i ) z^{(i)} z(i)。
- 条件采样:给定 z ( i ) z^{(i)} z(i),从条件分布 p θ ∗ ( x ∣ z ) p_{\theta^*}(x|z) pθ∗(x∣z) 中生成观测数据 x ( i ) x^{(i)} x(i)。
这里, θ ∗ \theta^* θ∗ 表示真实的参数,但我们并不知道它的具体值。我们假设先验分布 p θ ∗ ( z ) p_{\theta^*}(z) pθ∗(z) 和似然函数 p θ ∗ ( x ∣ z ) p_{\theta^*}(x|z) pθ∗(x∣z) 属于参数化的分布族 p θ ( z ) p_{\theta}(z) pθ(z) 和 p θ ( x ∣ z ) p_{\theta}(x|z) pθ(x∣z),并且它们的概率密度函数对于 θ \theta θ 和 z z z 都几乎处处可微。
需要注意的是,这个生成过程的大部分对我们来说是不可见的:真实的参数 θ ∗ \theta^* θ∗ 和潜在变量 z ( i ) z^{(i)} z(i) 都是未知的。
一个关键的地方是,我们并不对边缘概率或后验概率做常见的简化假设。相反,我们感兴趣的是一种通用的算法,即使在以下困难情况下也能高效工作:
- 不可解性:边缘似然 p θ ( x ) = ∫ p θ ( z ) p θ ( x ∣ z ) d z p_{\theta}(x) = \int p_{\theta}(z)p_{\theta}(x|z) \, dz pθ(x)=∫pθ(z)pθ(x∣z)dz 的积分是不可解的(因此我们无法直接计算或对边缘似然求导);真实的后验分布 p θ ( z ∣ x ) = p θ ( x ∣ z ) p θ ( z ) p θ ( x ) p_{\theta}(z|x) = \frac{p_{\theta}(x|z)p_{\theta}(z)}{p_{\theta}(x)} pθ(z∣x)=pθ(x)pθ(x∣z)pθ(z) 也是不可解的(因此无法使用
EM算法);对于任何合理的平均场变分贝叶斯算法所需的积分也是不可解的。这些不可解性在当似然函数 p θ ( x ∣ z ) p_{\theta}(x|z) pθ(x∣z) 稍微复杂一些(例如包含非线性隐藏层的神经网络)时就会出现。 - 大规模数据集:当数据量非常大时,批量优化计算代价太高;我们希望使用小批量甚至单个数据点来更新参数。基于采样的方法,例如 Monte Carlo EM,在这种情况下通常太慢,因为它需要对每个数据点进行昂贵的采样过程。
在上述场景下,我们希望解决以下三个相关问题:
- 模型参数 θ \theta θ 的高效近似最大似然或最大后验估计。参数 θ \theta θ 本身可能是我们感兴趣的对象,例如在分析某个自然过程时。通过估计 θ \theta θ,我们还可以模拟隐藏的随机过程,生成与真实数据类似的人工数据。
- 给定观测数据 x x x 时,对潜在变量 z z z 进行高效的近似后验推断。这对于编码或数据表示任务非常有用。
- 对变量 x x x 进行高效的近似边缘推断。这使我们能够执行各种需要对 x x x 有先验的推断任务,常见的计算机视觉应用包括图像去噪、修复和超分辨率。
数据生成过程:
- 潜在变量采样:每个数据点 x ( i ) x^{(i)} x(i) 都有一个对应的潜在变量 z ( i ) z^{(i)} z(i),从先验分布 p θ ( z ) p_{\theta}(z) pθ(z) 中采样。
- 观测数据生成:给定 z ( i ) z^{(i)} z(i),从条件分布 p θ ( x ∣ z ) p_{\theta}(x|z) pθ(x∣z) 中生成 x ( i ) x^{(i)} x(i)。
未知量:
- 参数 θ ∗ \theta^* θ∗:真实的模型参数,我们希望估计它。
- 潜在变量 z ( i ) z^{(i)} z(i):未观察到的随机变量,我们希望对其进行推断。
挑战:
- 后验分布不可解:由于 p θ ( z ∣ x ) p_{\theta}(z|x) pθ(z∣x) 无法解析求解,传统的
EM算法或变分推断方法无法直接应用。- 大规模数据:需要高效的算法,能够在不牺牲精度的情况下处理大数据量。
为了解决上述问题,我们引入了一个 识别模型(recognition model) q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x):这是对不可解的真实后验 p θ ( z ∣ x ) p_{\theta}(z|x) pθ(z∣x) 的近似。需要注意的是,与平均场变分推断中的近似后验不同,这里的 q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x) 不一定是可分解的,其参数 ϕ \phi ϕ 也不是通过某种封闭形式的期望计算得出的。相反,我们将介绍一种方法,通过学习来联合优化识别模型的参数 ϕ \phi ϕ 和生成模型的参数 θ \theta θ。
引入识别模型 q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x):
- 目的:近似真实的后验分布 p θ ( z ∣ x ) p_{\theta}(z|x) pθ(z∣x)。
- 特点:不像传统的平均场方法,不需要可解析的期望计算。 q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x) 的形式可以更加灵活。
从编码理论的角度来看,未观察到的变量 z z z 可以解释为一个潜在表示或编码。因此,在本文中,我们也将 识别模型 q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x) 称为概率编码器(probabilistic encoder),因为给定一个数据点 x x x,它会生成一个关于可能的 z z z 值的分布(例如高斯分布),这些 z z z 值可能生成了观测数据 x x x。类似地,我们将 p θ ( x ∣ z ) p_{\theta}(x|z) pθ(x∣z) 称为 概率解码器(probabilistic decoder),因为给定一个编码 z z z,它会生成一个关于可能对应的 x x x 值的分布。
编码器和解码器的解释:
- 概率编码器 q ϕ ( z ∣ x ) q_{\phi}(z|x) qϕ(z∣x):给定输入 x x x,输出关于潜在变量 z z z 的分布,即编码过程。
- 概率解码器 p θ ( x ∣ z ) p_{\theta}(x|z) pθ(x∣z):给定潜在变量 z z z,输出关于观测数据 x x x 的分布,即解码过程。
3.2. The variational bound
边缘似然是各数据点边缘似然的总和: log p θ ( x ( 1 ) , ⋯ , x ( N ) ) = ∑ i = 1 N log p θ ( x ( i ) ) \log p_\theta(x^{(1)}, \cdots, x^{(N)}) = \sum_{i=1}^N \log p_\theta(x^{(i)}) logpθ(x(1),⋯,x(N))=∑i=1Nlogpθ(x(i)),其中每个数据点的边缘似然可以重写为:
log p θ ( x ( i ) ) = D K L ( q ϕ ( z ∣ x ( i ) ) ∣ ∣ p θ ( z ∣ x ( i ) ) ) + L ( θ , ϕ ; x ( i ) ) \log p_\theta(x^{(i)}) = D_{\mathrm{KL}}(q_\phi(z|x^{(i)}) || p_\theta(z|x^{(i)})) + \mathcal{L}(\theta, \phi; x^{(i)}) logpθ(x(i))=DKL(qϕ(z∣x(i))∣∣pθ(z∣x(i)))+L(θ,ϕ;x(i))
公式右侧的第一项是近似后验分布 q ϕ ( z ∣ x ( i ) ) q_\phi(z|x^{(i)}) qϕ(z∣x(i)) 与真实后验分布 p θ ( z ∣ x ( i ) ) p_\theta(z|x^{(i)}) pθ(z∣x(i)) 的 KL 散度,由于 KL 散度非负,因此第二项 L ( θ , ϕ ; x ( i ) ) \mathcal{L}(\theta, \phi; x^{(i)}) L(θ,ϕ;x(i)) 被称为数据点 i i i 的边缘似然的 变分下界,其定义为:
L ( θ , ϕ ; x ( i ) ) = E q ϕ ( z ∣ x ) [ − log q ϕ ( z ∣ x ) + log p θ ( x , z ) ] \mathcal{L}(\theta, \phi; x^{(i)}) = \mathbb{E}{q_\phi(z|x)} [-\log q_\phi(z|x) + \log p_\theta(x, z)] L(θ,ϕ;x(i))=Eqϕ(z∣x)[−logqϕ(z∣x)+logpθ(x,z)]
也可以重写为:
L ( θ , ϕ ; x ( i ) ) = − D K L ( q ϕ ( z ∣ x ( i ) ) ∣ ∣ p θ ( z ) ) + E q ϕ ( z ∣ x ( i ) ) [ log p θ ( x ( i ) ∣ z ) ] \mathcal{L}(\theta, \phi; x^{(i)}) = - D_{\mathrm{KL}}(q_\phi(z|x^{(i)}) || p_\theta(z)) + \mathbb{E}{q_\phi(z|x^{(i)})} [\log p_\theta(x^{(i)}|z)] L(θ,ϕ;x(i))=−DKL(qϕ(z∣x(i))∣∣pθ(z))+Eqϕ(z∣x(i))[logpθ(x(i)∣z)]
我们希望对变分参数 ϕ \phi ϕ 和生成参数 θ \theta θ 同时优化变分下界 L ( θ , ϕ ; x ( i ) ) \mathcal{L}(\theta, \phi; x^{(i)}) L(θ,ϕ;x(i))
边缘似然分解:
- 数据点的边缘似然 log p θ ( x ( i ) ) \log p_\theta(x^{(i)}) logpθ(x(i)) 被分解为两部分:
- KL 散度 D K L ( q ϕ ( z ∣ x ( i ) ) ∣ ∣ p θ ( z ∣ x ( i ) ) ) D_{\mathrm{KL}}(q_\phi(z|x^{(i)}) || p_\theta(z|x^{(i)})) DKL(qϕ(z∣x(i))∣∣pθ(z∣x(i)))。
- 变分下界 L ( θ , ϕ ; x ( i ) ) \mathcal{L}(\theta, \phi; x^{(i)}) L(θ,ϕ;x(i))。
变分下界的意义:
- 由于 KL 散度非负,变分下界 L ( θ , ϕ ; x ( i ) ) \mathcal{L}(\theta, \phi; x^{(i)}) L(θ,ϕ;x(i)) 是边缘似然的下界。
- 优化变分下界可以间接提高边缘似然的值。
下界的分解:
- 第一项是 KL 散度 D K L ( q ϕ ( z ∣ x ( i ) ) ∣ ∣ p θ ( z ) ) D_{\mathrm{KL}}(q_\phi(z|x^{(i)}) || p_\theta(z)) DKL(qϕ(z∣x(i))∣∣pθ(z)),用来衡量近似后验 q_\phi(z|x) 与先验 p θ ( z ) p_\theta(z) pθ(z) 的相似度。
- 第二项是重构误差的期望 E q ϕ ( z ∣ x ( i ) ) [ log p θ ( x ( i ) ∣ z ) ] \mathbb{E}{q_\phi(z|x^{(i)})} [\log p_\theta(x^{(i)}|z)] Eqϕ(z∣x(i))[logpθ(x(i)∣z)],表示生成模型 p θ ( x ∣ z ) p_\theta(x|z) pθ(x∣z) 重构数据的能力。
3.3. The SGVB estimator and AEVB algorithm
3.3.1. Stochastic Gradient Variational Bayes Estimator
在这一节中,我们提出了一种实用的下界及其梯度估计器,并假设近似后验为 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x)。需要注意的是,这一技术同样适用于非条件情况下的近似后验 q ϕ ( z ) q_\phi(z) qϕ(z)。
在选定的近似后验分布 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 的基础上,在一些轻微约束条件下,我们可以通过一个辅助噪声变量 ε \varepsilon ε 的可微变换 g ϕ ( ε , x ) g_\phi(\varepsilon, x) gϕ(ε,x) 对随机变量 z z z 进行重新参数化:
z = g ϕ ( ε , x ) , ε ∼ p ( ε ) z = g_\phi(\varepsilon, x), \quad \varepsilon \sim p(\varepsilon) z=gϕ(ε,x),ε∼p(ε)
对于任何关于 z z z 的函数 f ( z ) f(z) f(z),可以通过以下公式用 ε \varepsilon ε 表达期望值:
E q ϕ ( z ∣ x ) [ f ( z ) ] = E p ( ε ) [ f ( g ϕ ( ε , x ) ) ] \mathbb{E}{q_\phi(z|x)} [f(z)] = \mathbb{E}{p(\varepsilon)} [f(g_\phi(\varepsilon, x))] Eqϕ(z∣x)[f(z)]=Ep(ε)[f(gϕ(ε,x))]
通过蒙特卡罗采样估计:
E q ϕ ( z ∣ x ) [ f ( z ) ] ≈ 1 L ∑ l = 1 L f ( g ϕ ( ε ( l ) , x ) ) \mathbb{E}{q_\phi(z|x)} [f(z)] \approx \frac{1}{L} \sum_{l=1}^L f(g_\phi(\varepsilon^{(l)}, x)) Eqϕ(z∣x)[f(z)]≈L1∑l=1Lf(gϕ(ε(l),x))
其中 ε ( l ) ∼ p ( ε ) \varepsilon^{(l)} \sim p(\varepsilon) ε(l)∼p(ε)。
应用于变分下界,可以得到通用的随机梯度变分贝叶斯(SGVB)估计器:
L ~ A ( θ , ϕ ; x ( i ) ) ≈ 1 L ∑ l = 1 L [ log p θ ( x ( i ) , z ( i , l ) ) − log q ϕ ( z ( i , l ) ∣ x ( i ) ) ] \tilde{\mathcal{L}}A(\theta, \phi; x^{(i)}) \approx \frac{1}{L} \sum{l=1}^L \big[ \log p_\theta(x^{(i)}, z^{(i, l)}) - \log q_\phi(z^{(i, l)}|x^{(i)}) \big] L~A(θ,ϕ;x(i))≈L1∑l=1L[logpθ(x(i),z(i,l))−logqϕ(z(i,l)∣x(i))]
对于某些情况(例如 KL 散度可以解析求解),SGVB 估计器可以被简化为更低方差的形式:
L ~ B ( θ , ϕ ; x ( i ) ) = − D K L ( q ϕ ( z ∣ x ( i ) ) ∣ ∣ p θ ( z ) ) + 1 L ∑ l = 1 L log p θ ( x ( i ) ∣ z ( i , l ) ) \tilde{\mathcal{L}}B(\theta, \phi; x^{(i)}) = - D{\mathrm{KL}}(q_\phi(z|x^{(i)}) || p_\theta(z)) + \frac{1}{L} \sum_{l=1}^L \log p_\theta(x^{(i)}|z^{(i, l)}) L~B(θ,ϕ;x(i))=−DKL(qϕ(z∣x(i))∣∣pθ(z))+L1∑l=1Llogpθ(x(i)∣z(i,l))
其中 z ( i , l ) = g ϕ ( ε ( i , l ) , x ( i ) ) z^{(i, l)} = g_\phi(\varepsilon^{(i, l)}, x^{(i)}) z(i,l)=gϕ(ε(i,l),x(i)),且 ε ( l ) ∼ p ( ε ) \varepsilon^{(l)} \sim p(\varepsilon) ε(l)∼p(ε)。
SGVB的核心是利用 重新参数化技巧,将原始需要对 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 的积分替换为对辅助噪声变量 ε \varepsilon ε 的积分。这种重新参数化使得:
- 随机变量 z 由噪声变量 \varepsilon 和输入 x 通过可微函数 g_\phi 确定。
- 可以直接通过采样 \varepsilon 来估计目标函数的梯度。
相比传统蒙特卡罗方法,SGVB估计器有以下优点:
- 梯度可微,可以使用高效的优化算法。
- 在某些情况下(如KL散度可解析求解),可以进一步降低方差。
3.3.2. Auto-Encoding Variational Bayes
在独立同分布(i.i.d.)数据集 X X X 的情况下,针对整个数据集的变分下界可以通过小批量(minibatch)估计器进行计算:
L ( θ , ϕ ; X ) ≈ L ~ M ( θ , ϕ ; X M ) = N M ∑ i = 1 M L ~ ( θ , ϕ ; x ( i ) ) \mathcal{L}(\theta, \phi; X) \approx \tilde{\mathcal{L}}M(\theta, \phi; X_M) = \frac{N}{M} \sum{i=1}^M \tilde{\mathcal{L}}(\theta, \phi; x^{(i)}) L(θ,ϕ;X)≈L~M(θ,ϕ;XM)=MN∑i=1ML~(θ,ϕ;x(i))
其中, X M = { x ( i ) } i = 1 M X_M = \{x^{(i)}\}_{i=1}^M XM={x(i)}i=1M 是从完整数据集随机抽取的小批量样本
AEVB结合了SGVB估计器和小批量随机梯度方法,用于优化变分下界。其主要创新点包括:
- 通过小批量样本提高了大数据集上的训练效率。
- 将近似后验建模为神经网络(即识别模型),可以高效地进行推断。
- 使用简单的采样(无需复杂的MCMC),直接进行参数优化。
AEVB的意义
- 效率高:针对大规模数据集,能够以小批量方式快速优化模型参数。
- 灵活性强:可以适配各种含连续潜在变量的生成模型。
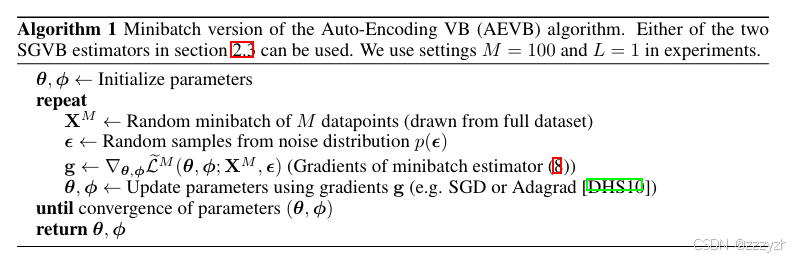
算法步骤如下:
- 随机初始化参数 θ , ϕ \theta, \phi θ,ϕ。
- 在每次迭代中:
- 从完整数据集中随机抽取一个小批量 X M X_M XM。
- 从噪声分布 p ( ε ) p(\varepsilon) p(ε) 中采样随机变量 ε \varepsilon ε。
- 计算小批量估计器的梯度 ∇ θ , ϕ L ~ M ( θ , ϕ ; X M , ε ) \nabla_{\theta, \phi} \tilde{\mathcal{L}}_M(\theta, \phi; X_M, \varepsilon) ∇θ,ϕL~M(θ,ϕ;XM,ε)。
- 使用梯度更新参数(例如通过随机梯度下降或 Adagrad 优化器)。
- 重复直至收敛。
3.4. The reparameterization trick
3.4.1. Trick
为了解决我们的问题,提出了一种替代方法来从 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 中生成样本。重新参数化的核心思想非常简单。假设 z z z 是一个连续随机变量,且 z ∼ q ϕ ( z ∣ x ) z \sim q_\phi(z|x) z∼qϕ(z∣x) 是某个条件分布。那么,通常可以将随机变量 z z z 表示为一个确定性的变量:
z = g ϕ ( ε , x ) z = g_\phi(\varepsilon, x) z=gϕ(ε,x)
其中, ε \varepsilon ε 是一个具有独立边缘分布 p ( ε ) p(\varepsilon) p(ε) 的辅助变量,而 g ϕ ( ⋅ ) g_\phi(\cdot) gϕ(⋅) 是某个参数化的向量值函数。
这种重新参数化对我们的情况非常有用,因为它可以将关于 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 的期望重写为关于 p ( ε ) p(\varepsilon) p(ε) 的期望,从而使得期望的蒙特卡罗估计对 ϕ \phi ϕ 是可微的。证明如下:
给定确定性映射 z = g ϕ ( ε , x ) z = g_\phi(\varepsilon, x) z=gϕ(ε,x),我们知道 q ϕ ( z ∣ x ) ∏ i d z i = p ( ε ) ∏ i d ε i q_\phi(z|x) \prod_i dz_i = p(\varepsilon) \prod_i d\varepsilon_i qϕ(z∣x)∏idzi=p(ε)∏idεi。因此:
∫ q ϕ ( z ∣ x ) f ( z ) d z = ∫ p ( ε ) f ( g ϕ ( ε , x ) ) d ε \int q_\phi(z|x) f(z) dz = \int p(\varepsilon) f(g_\phi(\varepsilon, x)) d\varepsilon ∫qϕ(z∣x)f(z)dz=∫p(ε)f(gϕ(ε,x))dε
这表明可以构造一个可微的估计器:
∫ q ϕ ( z ∣ x ) f ( z ) d z ≈ 1 L ∑ l = 1 L f ( g ϕ ( x , ε ( l ) ) ) \int q_\phi(z|x) f(z) dz \approx \frac{1}{L} \sum_{l=1}^L f(g_\phi(x, \varepsilon^{(l)})) ∫qϕ(z∣x)f(z)dz≈L1∑l=1Lf(gϕ(x,ε(l)))
其中 ε ( l ) ∼ p ( ε ) \varepsilon^{(l)} \sim p(\varepsilon) ε(l)∼p(ε)。
重新参数化的作用
- 将随机性移到辅助变量 \varepsilon:
原始的 z z z 依赖于复杂的后验分布 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x),直接优化非常困难。重新参数化将 z z z 表示为由可控参数 ϕ \phi ϕ、输入 x x x 和简单分布 p ( ε ) p(\varepsilon) p(ε) 生成的确定性变量,从而简化了采样和优化。- 使梯度计算成为可能:
原始的采样过程通常不可微,但通过重新参数化,可以将目标函数关于 ϕ \phi ϕ 的梯度转化为辅助变量 ε \varepsilon ε 的期望,这种期望是可微的。- 简化变分推断:
在变分推断中,我们需要优化变分下界(涉及关于 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 的积分)。重新参数化技巧有效地将积分转化为简单分布 p ( ε ) p(\varepsilon) p(ε) 的采样问题,降低了计算复杂度。
3.4.2. Example
以单变量高斯分布为例:假设 z ∼ q ( z ∣ x ) = N ( μ , σ 2 ) z \sim q(z|x) = \mathcal{N}(\mu, \sigma^2) z∼q(z∣x)=N(μ,σ2)。在这种情况下,一个有效的重新参数化是:
z = μ + σ ε , ε ∼ N ( 0 , 1 ) z = \mu + \sigma \varepsilon, \quad \varepsilon \sim \mathcal{N}(0, 1) z=μ+σε,ε∼N(0,1)
因此:
E N ( z ; μ , σ 2 ) [ f ( z ) ] = E N ( ε ; 0 , 1 ) [ f ( μ + σ ε ) ] ≈ 1 L ∑ l = 1 L f ( μ + σ ε ( l ) ) \mathbb{E}{\mathcal{N}(z; \mu, \sigma^2)}[f(z)] = \mathbb{E}{\mathcal{N}(\varepsilon; 0, 1)}[f(\mu + \sigma \varepsilon)] \approx \frac{1}{L} \sum_{l=1}^L f(\mu + \sigma \varepsilon^{(l)}) EN(z;μ,σ2)[f(z)]=EN(ε;0,1)[f(μ+σε)]≈L1∑l=1Lf(μ+σε(l))
其中 ε ( l ) ∼ N ( 0 , 1 ) \varepsilon^{(l)} \sim \mathcal{N}(0, 1) ε(l)∼N(0,1)。
在高斯分布中,重新参数化技巧将采样过程分解为简单的均值和标准差调整:
- 均值 μ \mu μ 控制生成的中心位置。
- 标准差 σ \sigma σ 控制生成的随机性。
通过引入标准正态分布的噪声 ε \varepsilon ε,采样过程变得简单且可微。
3.4.3. Scope
对于哪些 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x),我们可以选择这种可微变换 g ϕ ( ⋅ ) g_\phi(\cdot) gϕ(⋅) 和辅助变量 ε ∼ p ( ε ) \varepsilon \sim p(\varepsilon) ε∼p(ε)。以下三种基本方法可行:
- 可逆累计分布函数(CDF):
如果分布的逆CDF是可求的,可以令 ε ∼ U ( 0 , 1 ) \varepsilon \sim U(0, 1) ε∼U(0,1),并令 g ϕ ( ε , x ) g_\phi(\varepsilon, x) gϕ(ε,x) 为分布 q ϕ ( z ∣ x ) q_\phi(z|x) qϕ(z∣x) 的逆CDF。例如:指数分布、洛伦兹分布(Cauchy)、对数正态分布等。 - 位置-尺度分布:
对于任何“位置-尺度”分布族,可以选择标准分布(位置=0,尺度=1)作为辅助变量 ε \varepsilon ε,并定义 g ( ⋅ ) = 位置 + 尺度 ⋅ ε g(\cdot) = \text{位置} + \text{尺度} \cdot \varepsilon g(⋅)=位置+尺度⋅ε。例如:高斯分布、拉普拉斯分布、学生 t 分布等。 - 组合变换:
一些复杂分布可以通过辅助变量的多种变换表达。例如:- 对数正态分布:通过指数化正态分布的变量得到。
- Gamma分布:通过指数分布变量的加和得到。
- Dirichlet分布:通过加权的Gamma分布变量得到。
总结
Auto-Encoding Variational Bayes (AEVB) 提出了一个高效的框架,将传统变分推断与深度学习结合,为潜变量模型的训练与推断提供了一种自动化的方法。通过 重参数化技巧 和 证据下界(ELBO) 的优化,该方法解决了复杂后验分布的推断问题,并实现了生成建模的高效优化。AEVB 的思想奠定了 变分自编码器(VAE) 的基础,极大地推动了生成模型领域的发展。