六自由度平台
力姆泰克六自由度平台
安装方便,维护简单 多重机械电气安全保护
向下翻动查看更多+

力姆泰克伺服系统集成
全新革命性结构设计与六轴先进伺服控制原理的结合,力姆泰克公司引进国外的专业技术在国内全新推出 全电动六自由度平台。将完全替代市场上原有的液压六自由度平台,避免了大型液压泵站,管道,阀门等复 杂系统。
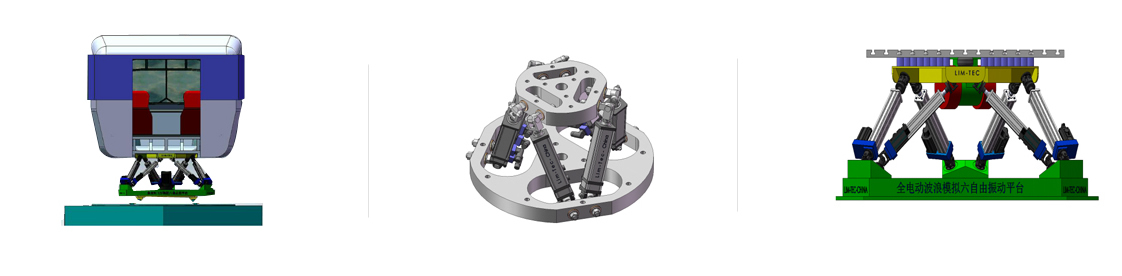
力姆泰克六自由度平台分为两大系列:动感仿真六自由度平台D6B系列,精密定位六自由度平台W6B系列
动感仿真六自由度平台D6B 系列的有效载荷范围为0.5吨-20吨,高逼真仿真动感平台通过与高性能视觉仿真 对接,可以广泛应用在各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器 、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域!
精密定位六自由度平台W6B系列的有效载荷为0.5吨-50吨,位置控制精度达到0.02mm,外配激光对直仪可以达 到更高精度0.01mm。可以广泛应用在各种汽车姿态测试设备,飞机/导弹等飞行器飞行姿态测试设备等精密测 试多自由度平台,以及空间宇宙飞船的对接,空中加油机的加油对接,飞机整机装配, 卫星装配等。
我们专业的技术团队可以按照客户的各种特殊的要求,提供不同特性参数的2/3/4/5/6/7自由度平台。我们为 您提供成套系统的服务:售前技术咨询,方案设计,售后安装调试,全程技术答疑,24小时快速响应等优质 服务。

产品特点:
为增强仿真的真实感而有的高性能动感提示性 能;
全数字化闭环伺服控制,专业运动控制卡保证运 动的平滑过渡以及高仿真性,减少动感漂移和失 真。
全新的模块化组合及自由灵活的系统集成, 满足 客户不同需求
高精密传动系统及优化组合, 保证系统的高效率 达到85%
安装方便,维护简单 多重机械电气安全保护, 保证设备的绝对安全
系统高响应时间及高加速度及低噪音
可视性友好人机界面,操作简单
动感仿真六自由度平台D6B系列参数规格
| 型号 | D6B-800KG | D6B-2000KG | D6B-3000KG | D6B-5000KG | D6R-10000KG | D6R-15000KG | D6R-20000KG |
| 传动丝杠种类 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 行星丝杠 | 行星丝杠 | 行星丝杠 |
| 单自由度最大偏移量 | |||||||
| 垂直方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 纵向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 侧向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 俯仰角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 滚转角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 偏航角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 单自由度最大速度 | |||||||
| 垂直方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 纵向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 侧向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 俯仰角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 滚转角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 偏航角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 单自由度最大加速度 | |||||||
| 垂直方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 纵向方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 侧向方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 俯仰角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 滚转角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 偏航角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 最大有效负载 | 800kg | 2000kg | 3000kg | 5000kg | 10000kg | 15000kg | 20000kg |
| 运动平台X轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台Y轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台Z轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台的重心高度 | 约0.6m | 约1m | 约1m | 约1m | 约1.8m | 约1.8m | 约1.8m |
| 运动平台的总高度 | 约2.5m | 约3m | 约4m | 约5m | 约7m | 约7.5m | 约7.5m |
| 电源 | 220V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ |
| 系统平均功率 | 4KW | 5KW | 6KW | 9KW | 11KW | 20KW | 30KW |
| 系统峰值功率 | 20KW | 30KW | 30KW | 30KW | 50KW | 70KW | 60KW |
精密定位六自由度平台W6B系列参数规格
| 型号 | W6B-800KG | W6B-2000KG | W6B-3000KG | D6B-5000KG | W6R-10000KG | W6R-15000KG | W6R-20000KG |
| 传动丝杠种类 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 行星丝杠 | 行星丝杠 | 行星丝杠 |
| 单自由度最大偏移量 | |||||||
| 垂直方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 纵向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 侧向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 俯仰角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 滚转角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 偏航角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 单自由度最大速度 | |||||||
| 垂直方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 纵向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 侧向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 俯仰角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 滚转角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 偏航角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 单自由度最大加速度 | |||||||
| 垂直方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 纵向方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 侧向方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 俯仰角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 滚转角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 偏航角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 最大有效负载 | 800kg | 2000kg | 3000kg | 5000kg | 10000kg | 15000kg | 20000kg |
六自由度运动模拟器系统组成:
运动平台控制系统
包含:特制双开门控制柜,工控机, 运动控制卡,伺服驱动器及布线,触 摸屏等。菜单式模块化人机界面,可 以清楚设置部分参数,内含多项电气 控制保护程序,保持良好的与主机的 快速通讯,内置运动能源优化分配系 统,提高能源使用效率,降低能耗。
视景仿真系统
三个42寸显示器或者环幕投影等视景 系统,达到真实的视觉效果。匹配高 保真音响系统,如驾驶身临其境。
伺服电动缸
6台伺服电动缸为运动平台提供六种运 动方式,使用最新的技术使用绝对编 码器,缸体极限位置缓冲系统,先进 的伺服控制系统使6个伺服缸按照设定。

轨迹运动,实现平滑运动,保证高保真效果的关键。内置限位开关系统保证极限安全。伺服电机匹配制动器保证意外时的及 时停止。电机与缸体之间可以同步带平行安装,特殊进口高强度同步带,终身免维护;可以选择电机与缸体之间直线连轴器 安装方式,保证更高的动态响应时间。
上下平台虎克铰接
高精密加工虎克铰接,保证系统的位置精密度和运动平滑无间隙,有限元分析保证虎克铰接及销轴的安全性,维护成本低。
上下工作平台
根据客户订制的特殊上下平台,有限元分析保证足够的强度,上平台可以增加旋转平台,增加到7自由度。