观测云对接 SkyWalking 最佳实践
简介
SkyWalking 是一个开源的 APM(应用性能监控)和可观测性分析平台,专为微服务、云原生架构和基于容器的架构设计。它提供了分布式追踪、服务网格遥测分析、度量聚合和可视化一体化的解决方案。如果您的应用中正在使用SkyWalking ,并且希望将 SkyWalking 采集到的 Tracing 数据集成到观测云,实现从基础设施到应用层的全面可观测。即可参考本文操作步骤,快速完成切换。
集成环境
- Java 版本 1.8
- DataKit 版本 1.31.0
- SkyWalking Agent 版本 9.0
操作步骤
1、安装 DataKit
登陆观测云控制台,点击左侧「集成」选择顶部「DataKit」,即可看到各种方式的安装命令。
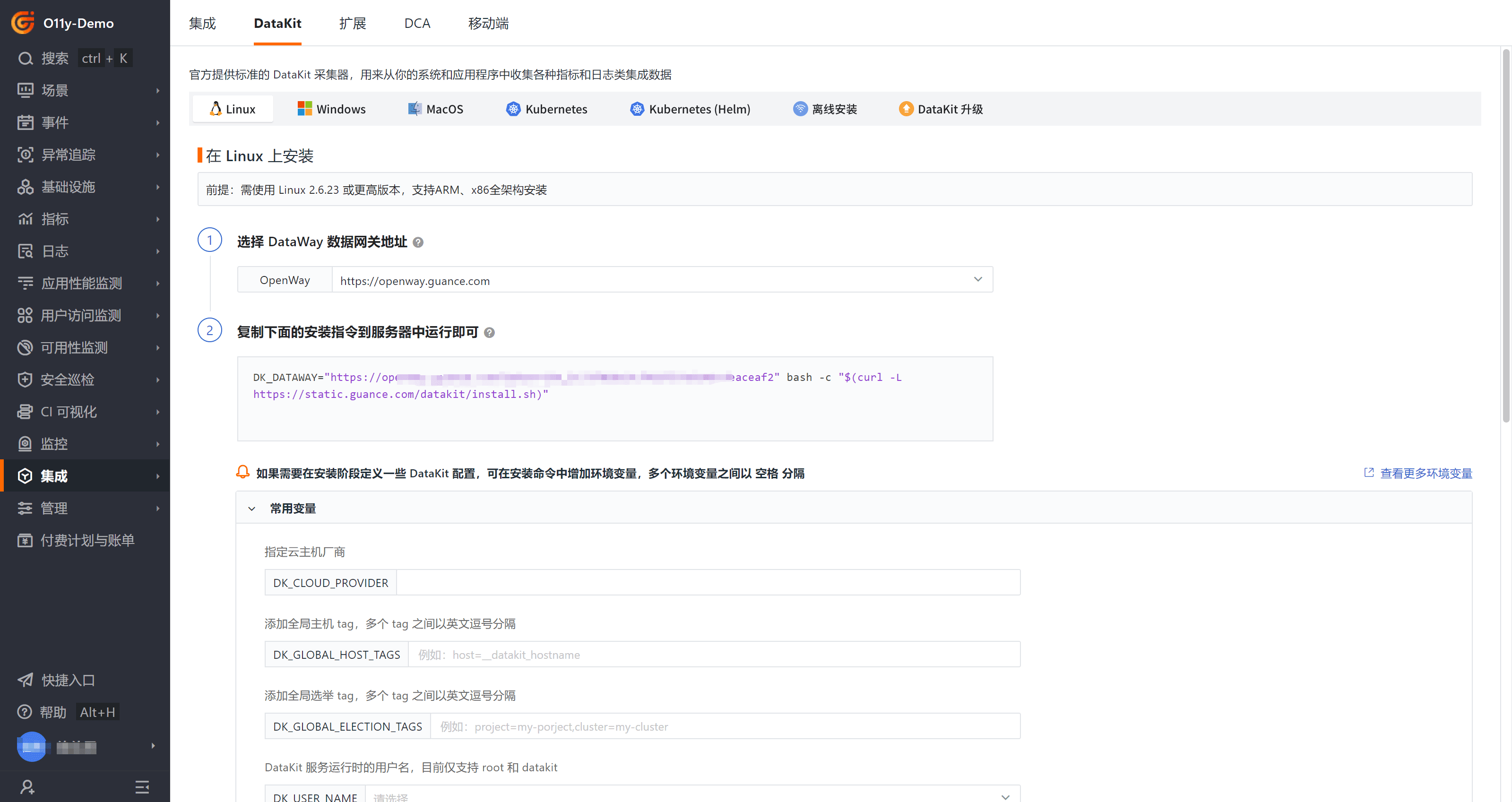
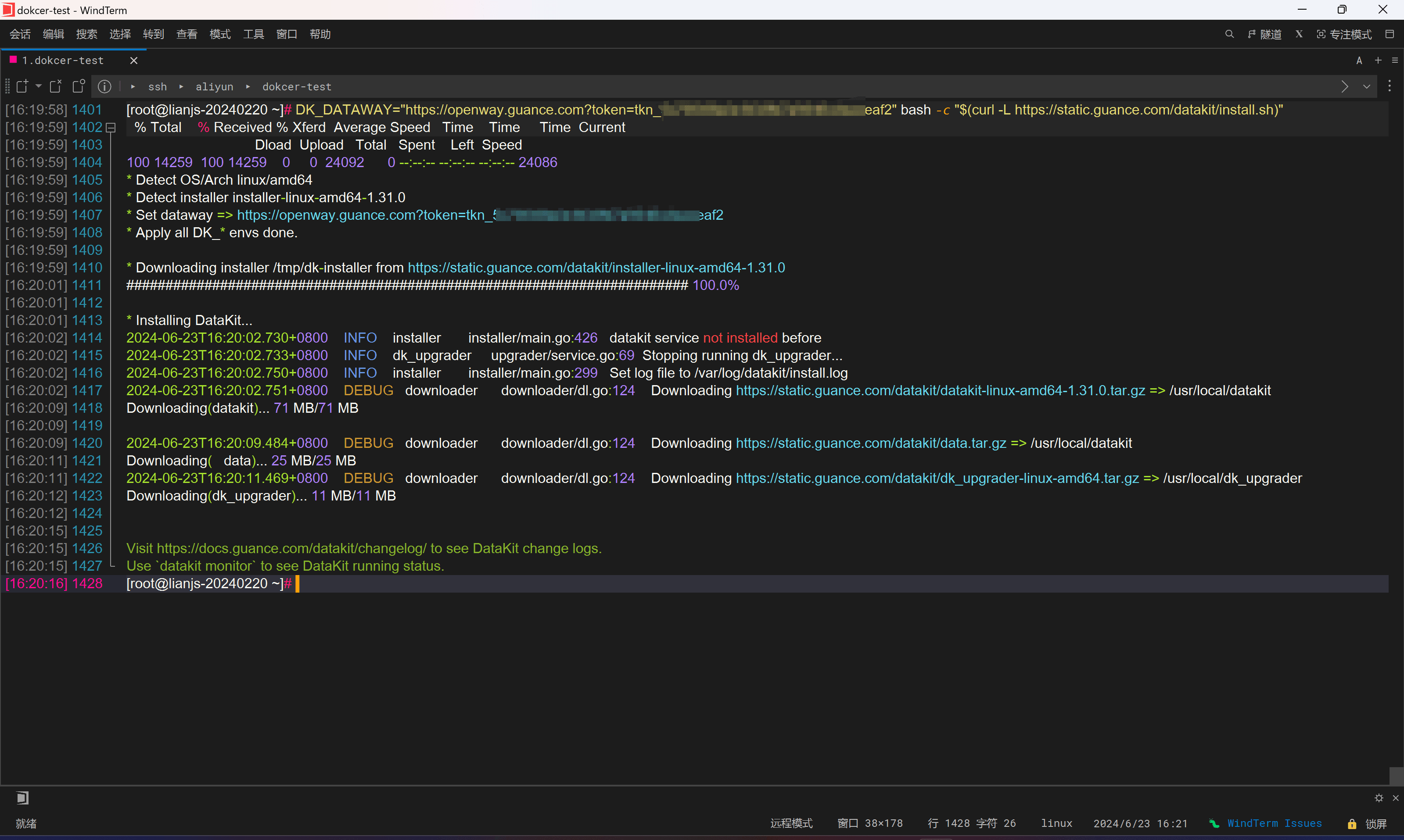
本文选择 Linux 方式安装,执行安装命名即可。
2、开启 SkyWalking 采集器
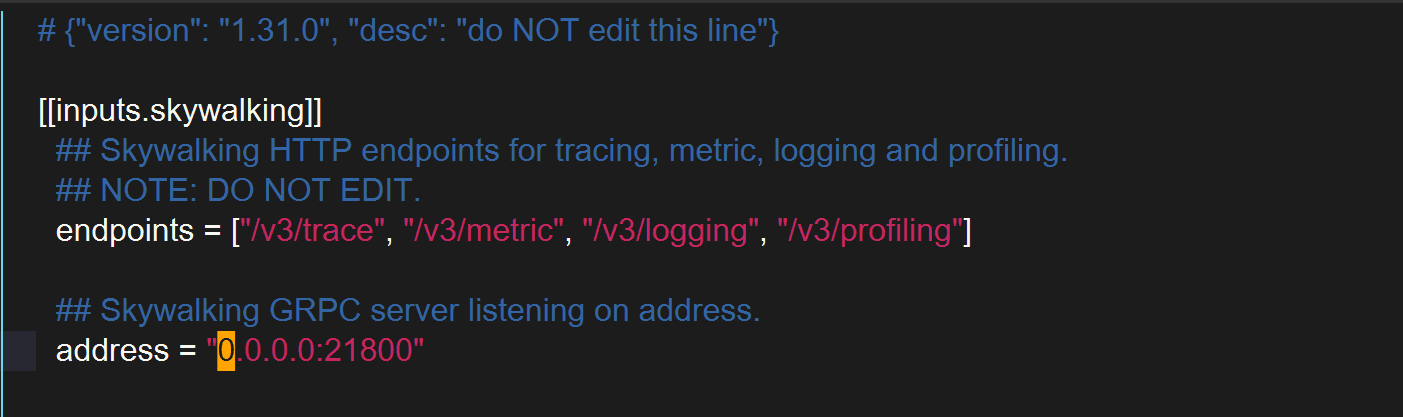
进入 DataKit 安装目录下的 /usr/local/datakit/conf.d/skywalking 目录,复制 skywalking.conf.sample 并命名为 skywalking.conf ,修改 skywalking agent 监听地址,示例如下:
cd /usr/local/datakit/conf.d/skywalking
cp skywalking.conf.sample skywalking.conf
# 重启datakit 服务
datakit service -R
3、配置 SkyWalking Agent
修改 SkyWalking Agent 配置文件中的 collector.backend_service 地址为上一步中 datakit 所在的主机 ip 和监听端口。

4、启动 Java 服务,在观测云查看 Tracing 数据
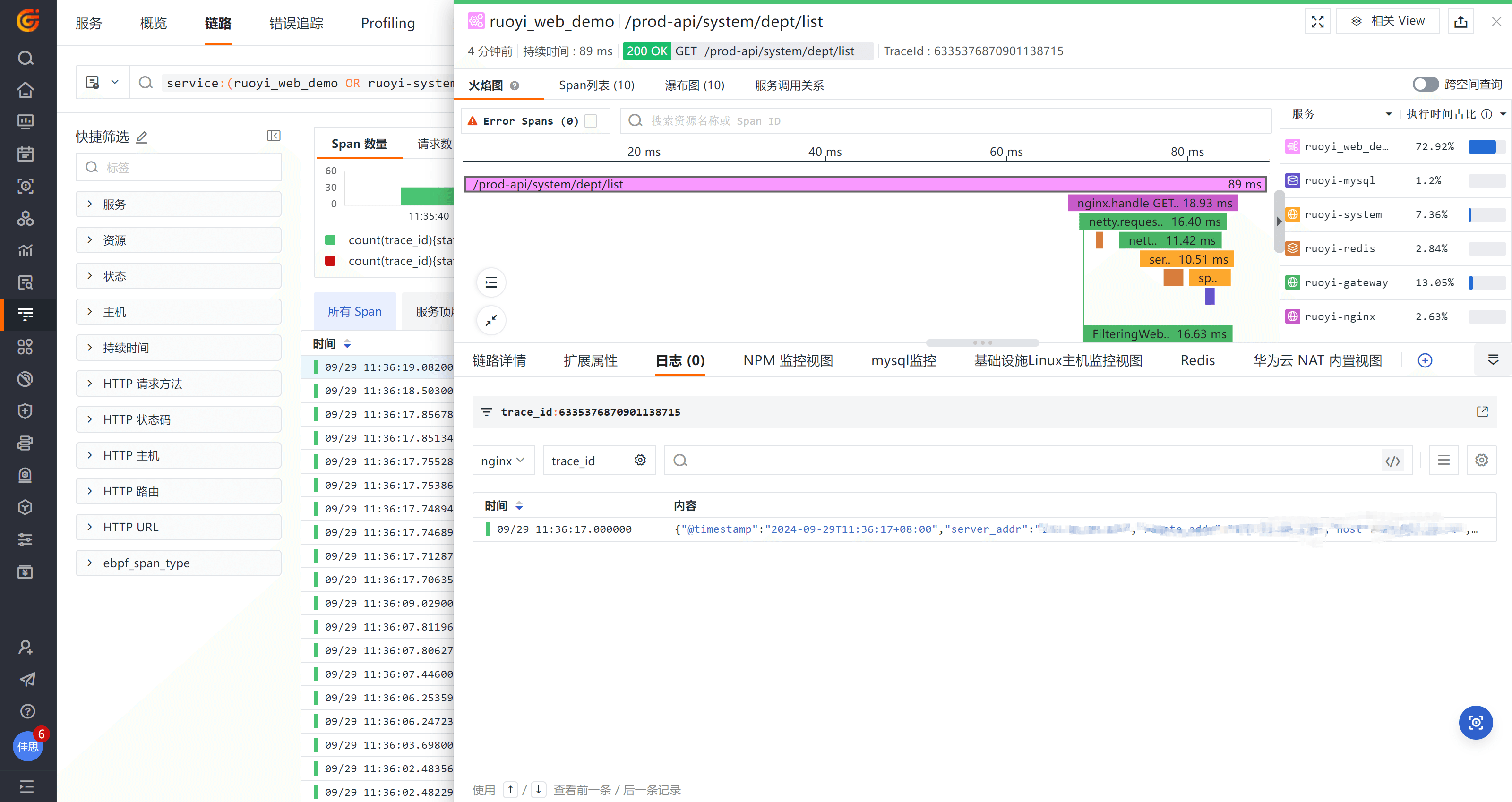
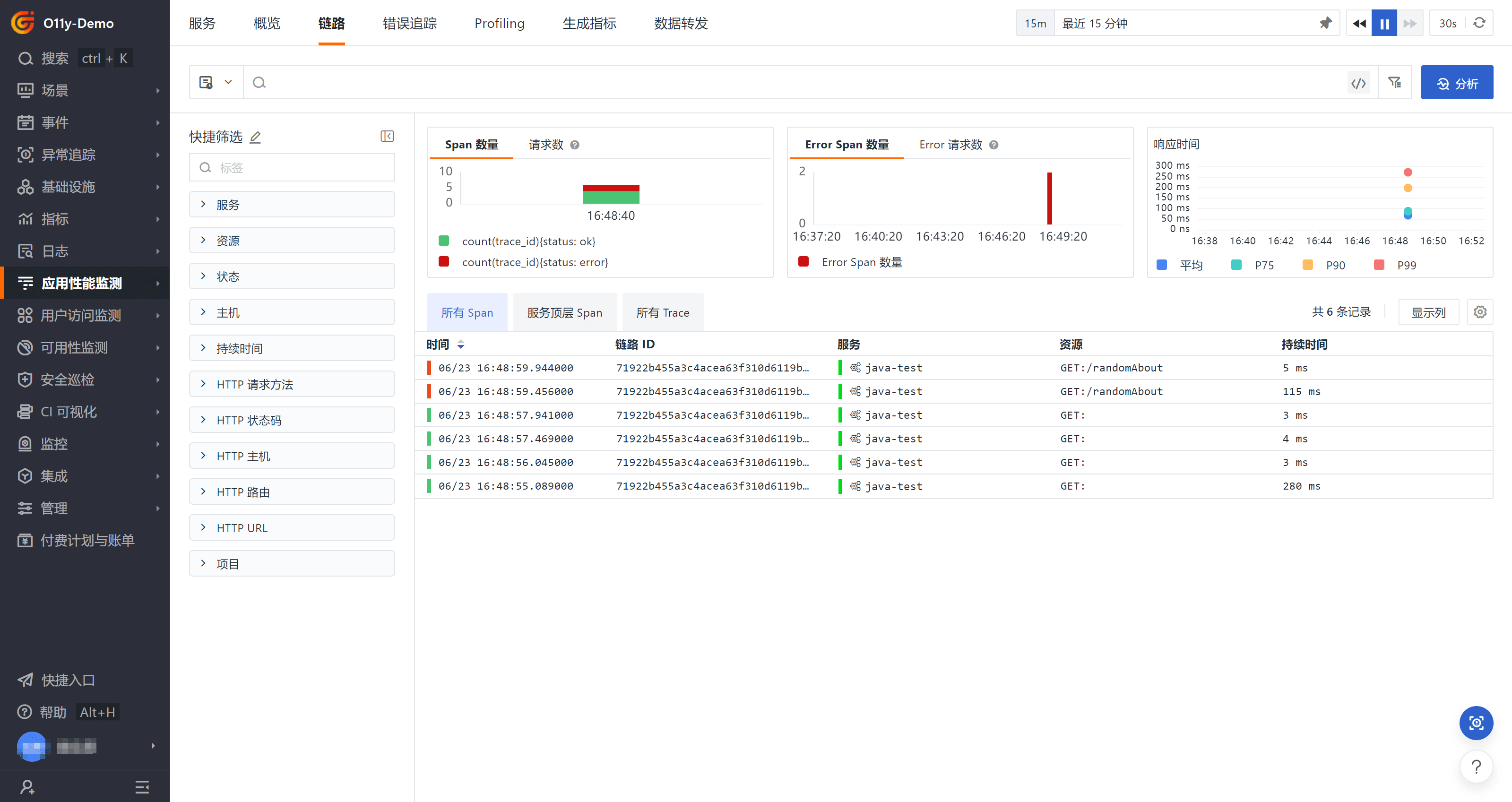
启动并访问 Java 服务,随后即可在观测云控制台,点击「应用性能监测」选择顶部「链路」查看对应的应用链路性能数据。
5、Tracing 关联指标
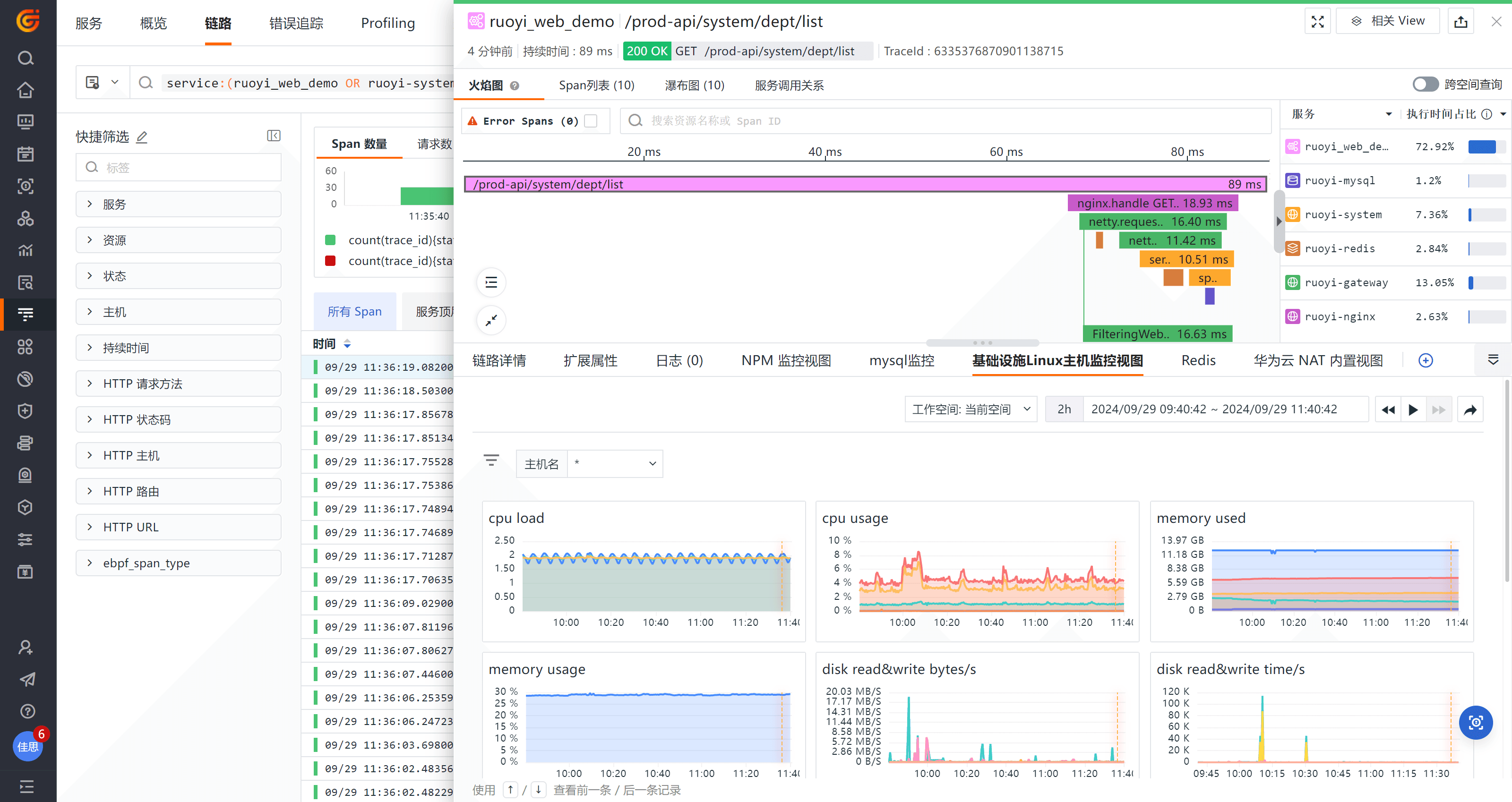
点击具体一条链接详情,可以关联查看该服务在调用时的各项主机、中间件等指标情况。
6、Tracing 关联日志
点击一条链路详情,还可以根据 trace_id ,关联查看对应的业务日志。