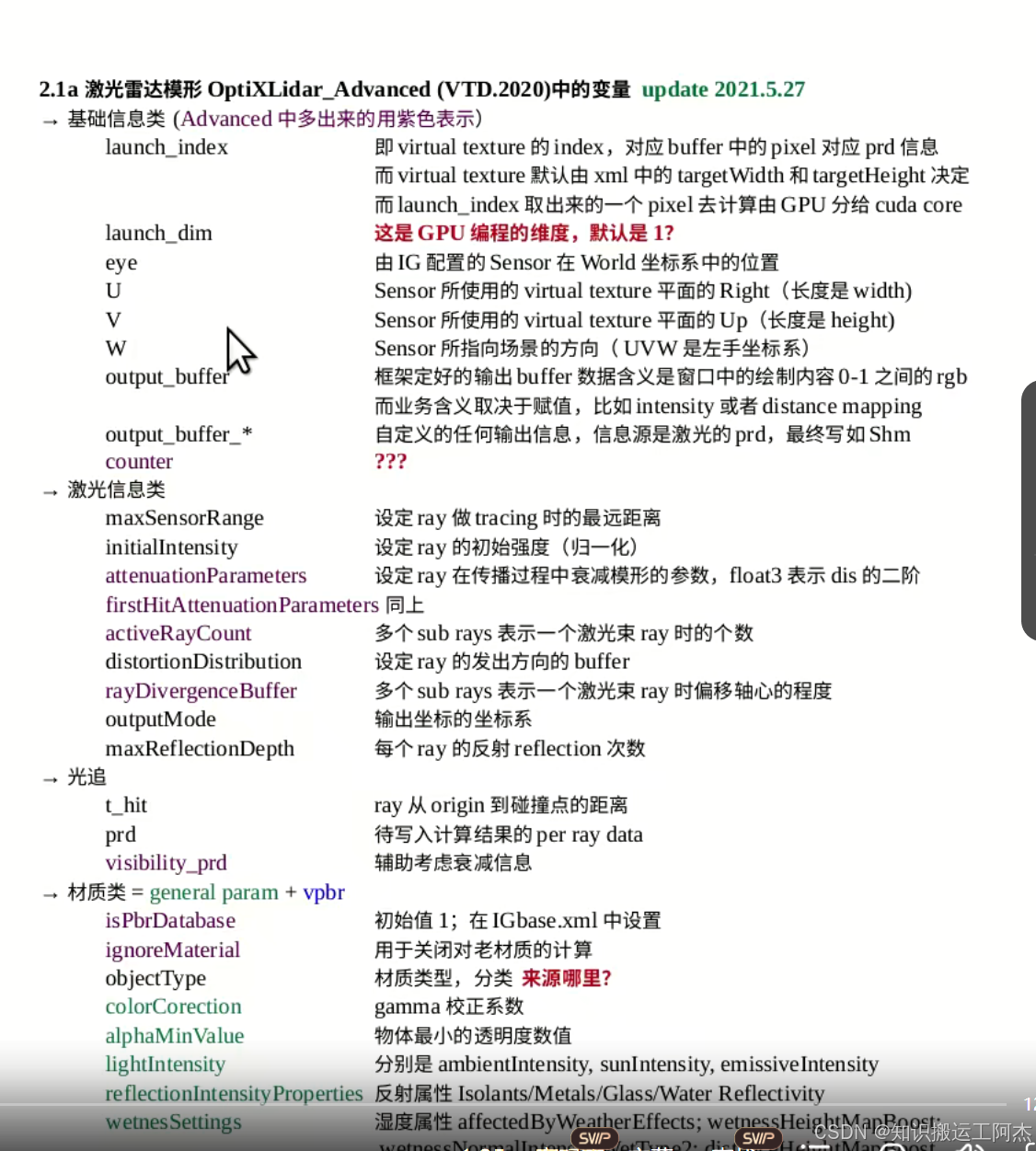
当前位置: 首页 > news >正文 VTD激光雷达(7)——07_OptiX_Variables_Advanced news 2025/8/4 9:34:50 文章目录 前言一、总结 前言 一、 1 和上图蓝绿的区别在于 总结 查看全文 http://www.lryc.cn/news/440480.html 相关文章: 运维工程师面试整理-自动化运维 【JAVA基础】实现Tomcat基本功能 风力发电叶片缺陷检测数据集 数据类型自动转换的解决方案 大厂校招:唯品会Java面试题及参考答案 Qt常用控件——QLCDNumber 专业学习|GERT网络概览(学习资源、原理介绍、变体介绍) 搭建一个基于角色的权限验证框架 下载chromedriver驱动 在STM32工程中使用Mavlink与飞控通信 【Elasticsearch】-7.17.24版本接入 ShouldSniffAttr在自动化测试中具体是如何应用? 前端vue3打印,多页打印,不使用插件(工作中让我写一个打印功能) 传感技术是如何实现实时监测和控制的呢 为什么mac打不开rar文件 苹果电脑打不开rar压缩文件怎么办 linux下日志系统setvbuf接口及结构体 handle_file_t成员介绍 ESP8266+httpServer+GET+POST实现网页验证密码 git仓库修改ip,本地代码修改 轻便灵活,声学卓越,流动会场创新应用—轻空间 13 Midjourney从零到商用·进阶篇:灯光、角度与风格等精细控制方法 为什么要把raw转成yuv 基于双向RRT算法的三维空间最优路线规划matlab仿真 若依-原理 台球厅灯控系统如何布线 佳易王桌球计时计费管理系统操作教程 安卓将本地日志上传到服务器 FloodFill(洪水灌溉)算法专题——DFS深搜篇 直播标准权威发布,阿里云RTS获首批卓越级评估认证 iOS 知识点记录 C++系列-STL中搜索相关算法 5.C++程序中的注释
文章目录 前言一、总结 前言 一、 1 和上图蓝绿的区别在于 总结 查看全文 http://www.lryc.cn/news/440480.html 相关文章: 运维工程师面试整理-自动化运维 【JAVA基础】实现Tomcat基本功能 风力发电叶片缺陷检测数据集 数据类型自动转换的解决方案 大厂校招:唯品会Java面试题及参考答案 Qt常用控件——QLCDNumber 专业学习|GERT网络概览(学习资源、原理介绍、变体介绍) 搭建一个基于角色的权限验证框架 下载chromedriver驱动 在STM32工程中使用Mavlink与飞控通信 【Elasticsearch】-7.17.24版本接入 ShouldSniffAttr在自动化测试中具体是如何应用? 前端vue3打印,多页打印,不使用插件(工作中让我写一个打印功能) 传感技术是如何实现实时监测和控制的呢 为什么mac打不开rar文件 苹果电脑打不开rar压缩文件怎么办 linux下日志系统setvbuf接口及结构体 handle_file_t成员介绍 ESP8266+httpServer+GET+POST实现网页验证密码 git仓库修改ip,本地代码修改 轻便灵活,声学卓越,流动会场创新应用—轻空间 13 Midjourney从零到商用·进阶篇:灯光、角度与风格等精细控制方法 为什么要把raw转成yuv 基于双向RRT算法的三维空间最优路线规划matlab仿真 若依-原理 台球厅灯控系统如何布线 佳易王桌球计时计费管理系统操作教程 安卓将本地日志上传到服务器 FloodFill(洪水灌溉)算法专题——DFS深搜篇 直播标准权威发布,阿里云RTS获首批卓越级评估认证 iOS 知识点记录 C++系列-STL中搜索相关算法 5.C++程序中的注释