YOLOv8+DeepSort实现
目录
1,YOLOv8算法简介
2,DeepSort算法介绍
1. SORT目标追踪
3,实现流程
1.检测
2. 生成detections
3. 卡尔曼滤波预测
4.使用匈牙利算法将预测后的tracks和当前帧中的detections进行匹配
5. 卡尔曼滤波更新
4,代码实现
结果:
1,YOLOv8算法简介
YOLOv8是由Ultralytics公司开发的最新一代目标检测算法,它是YOLO系列的一次重大更新,支持图像分类、物体检测和实例分割等多种视觉AI任务 。YOLOv8在继承了YOLO系列优点的基础上,进行了速度和精度的进一步优化,具有更快的推理速度和更高的检测精度 。
YOLOv8的核心特点包括:
- 网络架构:采用了轻量级的网络架构,引入了注意力机制,优化了网络结构,减少了冗余计算 。
- 损失函数:使用了多任务损失函数,结合了分类损失和定位损失,引入了IOU损失函数,更好地处理重叠目标 。
- 数据增强:在训练过程中应用了多种数据增强技术,如随机裁剪、旋转和缩放,提高了模型的泛化能力和鲁棒性 。
YOLOv8的实际应用非常广泛,它在安防监控、自动驾驶、智能家居等领域都有应用前景 。此外,YOLOv8的开源库被定位为算法框架,具有很好的可扩展性,不仅可以用于YOLO系列模型,还支持非YOLO模型以及分类分割姿态估计等任务 。
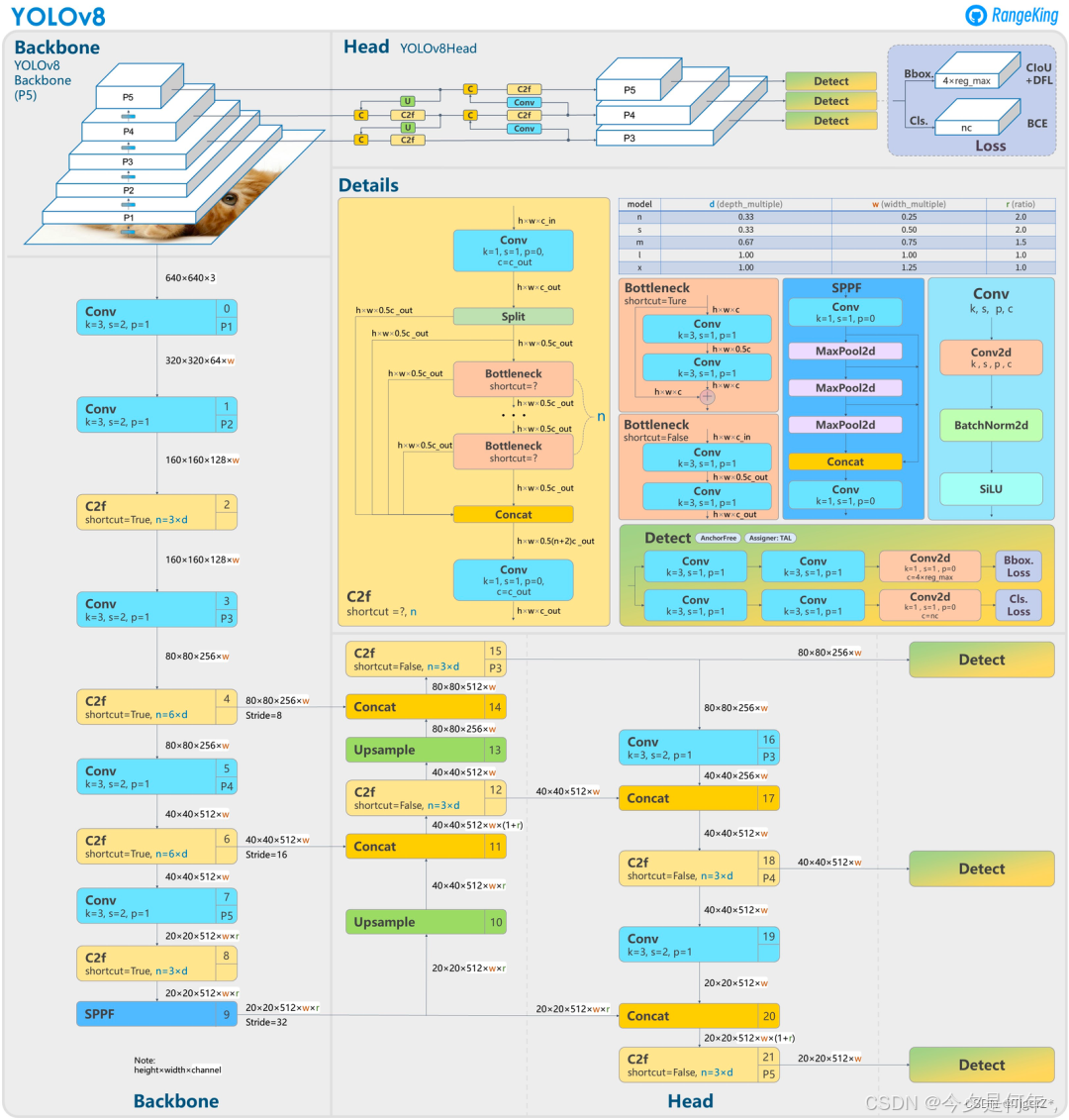
YOLOv8的创新之处在于它结合了当前多个SOTA技术,包括一个新的骨干网络、Ancher-Free检测头和新的损失函数,能够在多种硬件平台上运行 。YOLOv8的Backbone采用了C2f模块代替C3模块,增加了梯度流,提高了模型性能和收敛速度 。同时,YOLOv8的Head部分采用了解耦头结构,将分类和检测头分离,并从Anchor-Based变成了Anchor-Free 。
YOLOv8的训练策略也有所改进,训练总epoch数从300提升到了500,有助于进一步提升模型性能 。此外,YOLOv8还引入了TaskAlignedAssigner正样本分配策略和Distribution Focal Loss,优化了模型的Loss计算 。
在性能方面,YOLOv8在COCO数据集上的测试结果表明,相比YOLOv5,YOLOv8在精度上有了显著提升,但相应的参数量和FLOPs也有所增加 。尽管如此,YOLOv8依然保持了较高的推理速度,适用于实时目标检测任务 。
2,DeepSort算法介绍
DeepSORT是一种计算机视觉目标跟踪算法,旨在为每个对象分配唯一的ID并跟踪它们。它是SORT(Simple Online and Realtime Tracking,简单在线实时跟踪)算法的扩展和改进版本。SORT是一种轻量级目标跟踪算法,用于处理实时视频流中的目标跟踪问题。DeepSORT引入了深度学习技术,以加强SORT的性能,并特别关注在多个帧之间跟踪目标的一致性。
1. SORT目标追踪
SORT 是一种对象跟踪方法,其中使用卡尔曼滤波器和匈牙利算法等基本方法来跟踪对象,并声称比许多在线跟踪器更好。SORT 由以下 4 个关键组件组成:
- 检测:首先,在跟踪流程的第一步,目标检测器被用来检测当前帧中需要跟踪的目标对象。常用的目标检测器包括Faster R-CNN、YOLO等。
- 估计:在估计阶段,检测结果从当前帧传播到下一帧,使用恒速模型来估计下一帧中目标的位置。当检测结果与已知的目标相关联时,检测到的边界框信息用于更新目标的状态,包括速度分量,这是通过卡尔曼滤波器框架来实现的。
- 数据关联:在数据关联步骤中,目标的边界框信息与检测结果结合,从而形成一个成本矩阵,该矩阵计算每个检测与已知目标的所有预测边界框之间的交并比(IOU)距离。然后,使用匈牙利算法来优化分配,以确保正确地将检测结果与目标关联起来。这个技术有助于解决遮挡问题并保持目标的唯一身份。
- 管理目标ID的创建与删除:跟踪模块负责创建和销毁目标的唯一身份(ID)。如果检测结果与目标的IOU小于某个预定义的阈值(通常称为IOUmin),则不会将检测结果与目标相关联,这表示目标未被跟踪。此外,如果在连续TLost帧中没有检测到目标,跟踪将终止该目标的轨迹,其中TLost是一个可配置的参数。如果目标重新出现,跟踪将在新的身份下恢复。
3,实现流程
1.检测
在每一帧中,目标检测器识别并提取出边界框(bbox),这些边界框表示在当前帧中检测到的目标物体。
def detect(self,cv_src):boxes, scores, class_ids = self.detector(cv_src)pred_boxes = []for i in range(len(boxes)):x1,y1 = int(boxes[i][0]),int(boxes[i][1])x2,y2 = int(boxes[i][2]),int(boxes[i][3])lbl = class_names[class_ids[i]]# print(class_ids[i])# if lbl in ['person','sack','elec','bag','box','caron']:# continuepred_boxes.append((x1,y1,x2,y2,lbl,class_ids[i]))return cv_src,pred_boxes
2. 生成detections
从这些检测到的边界框中,生成称为"detections"的目标检测结果。每个detection通常包含有关目标的信息,如边界框坐标和可信度分数。
# deep_sort.py
def update(self, bbox_xywh, confidences, ori_img):self.height, self.width = ori_img.shape[:2]# 提取每个bbox的featurefeatures = self._get_features(bbox_xywh, ori_img)# [cx,cy,w,h] -> [x1,y1,w,h]bbox_tlwh = self._xywh_to_tlwh(bbox_xywh)# 过滤掉置信度小于self.min_confidence的bbox,生成detectionsdetections = [Detection(bbox_tlwh[i], conf, features[i]) for i,conf in enumerate(confidences) if conf > self.min_confidence]# NMS (这里self.nms_max_overlap的值为1,即保留了所有的detections)boxes = np.array([d.tlwh for d in detections])scores = np.array([d.confidence for d in detections])indices = non_max_suppression(boxes, self.nms_max_overlap, scores)detections = [detections[i] for i in indices]...
3. 卡尔曼滤波预测
对于已知的跟踪对象(“tracks”),在下一帧中进行卡尔曼滤波预测,以估计其新的位置和速度。
# track.py
def predict(self, kf):"""Propagate the state distribution to the current time step using a Kalman filter prediction step.Parameters----------kf: The Kalman filter."""self.mean, self.covariance = kf.predict(self.mean, self.covariance) # 预测self.age += 1 # 该track自出现以来的总帧数加1self.time_since_update += 1 # 该track自最近一次更新以来的总帧数加1
4.使用匈牙利算法将预测后的tracks和当前帧中的detections进行匹配
这是DeepSORT中的核心步骤。DeepSORT使用匈牙利算法来将预测的tracks和当前帧的detections进行匹配。这个匹配可以采用两种级联方法:首先,通过计算马氏距离来估算预测对象与检测对象之间的关联,如果马氏距离小于指定的阈值,则将它们匹配为同一目标。其次,DeepSORT还使用外观特征余弦距离度量,通过一个重识别模型获得不同物体的特征向量,然后构建余弦距离代价函数,以计算预测对象与检测对象的相似度。这两个代价函数的结果都趋向于小,如果边界框接近且特征相似,则将它们匹配为同一目标。
# tracker.py
def _match(self, detections):def gated_metric(racks, dets, track_indices, detection_indices):"""基于外观信息和马氏距离,计算卡尔曼滤波预测的tracks和当前时刻检测到的detections的代价矩阵"""features = np.array([dets[i].feature for i in detection_indices])targets = np.array([tracks[i].track_id for i in track_indices]# 基于外观信息,计算tracks和detections的余弦距离代价矩阵cost_matrix = self.metric.distance(features, targets)# 基于马氏距离,过滤掉代价矩阵中一些不合适的项 (将其设置为一个较大的值)cost_matrix = linear_assignment.gate_cost_matrix(self.kf, cost_matrix, tracks, dets, track_indices, detection_indices)return cost_matrix# 区分开confirmed tracks和unconfirmed tracksconfirmed_tracks = [i for i, t in enumerate(self.tracks) if t.is_confirmed()]unconfirmed_tracks = [i for i, t in enumerate(self.tracks) if not t.is_confirmed()]# 对confirmd tracks进行级联匹配matches_a, unmatched_tracks_a, unmatched_detections = \linear_assignment.matching_cascade(gated_metric, self.metric.matching_threshold, self.max_age,self.tracks, detections, confirmed_tracks)# 对级联匹配中未匹配的tracks和unconfirmed tracks中time_since_update为1的tracks进行IOU匹配iou_track_candidates = unconfirmed_tracks + [k for k in unmatched_tracks_a ifself.tracks[k].time_since_update == 1]unmatched_tracks_a = [k for k in unmatched_tracks_a ifself.tracks[k].time_since_update != 1]matches_b, unmatched_tracks_b, unmatched_detections = \linear_assignment.min_cost_matching(iou_matching.iou_cost, self.max_iou_distance, self.tracks,detections, iou_track_candidates, unmatched_detections)# 整合所有的匹配对和未匹配的tracksmatches = matches_a + matches_bunmatched_tracks = list(set(unmatched_tracks_a + unmatched_tracks_b))return matches, unmatched_tracks, unmatched_detections# 级联匹配源码 linear_assignment.py
def matching_cascade(distance_metric, max_distance, cascade_depth, tracks, detections, track_indices=None, detection_indices=None):...unmatched_detections = detection_indicematches = []# 由小到大依次对每个level的tracks做匹配for level in range(cascade_depth):# 如果没有detections,退出循环if len(unmatched_detections) == 0: break# 当前level的所有tracks索引track_indices_l = [k for k in track_indices if tracks[k].time_since_update == 1 + level]# 如果当前level没有track,继续if len(track_indices_l) == 0: continue# 匈牙利匹配matches_l, _, unmatched_detections = min_cost_matching(distance_metric, max_distance, tracks, detections, track_indices_l, unmatched_detections)matches += matches_lunmatched_tracks = list(set(track_indices) - set(k for k, _ in matches))return matches, unmatched_tracks, unmatched_detections5. 卡尔曼滤波更新
匹配后,DeepSORT使用检测到的detections来更新每个已知的跟踪对象的状态,例如位置和速度。这有助于保持跟踪对象的准确性和连续性。
def update(self, detections):"""Perform measurement update and track management.Parameters----------detections: List[deep_sort.detection.Detection]A list of detections at the current time step."""# 得到匹配对、未匹配的tracks、未匹配的dectectionsmatches, unmatched_tracks, unmatched_detections = self._match(detections)# 对于每个匹配成功的track,用其对应的detection进行更新for track_idx, detection_idx in matches:self.tracks[track_idx].update(self.kf, detections[detection_idx])# 对于未匹配的成功的track,将其标记为丢失for track_idx in unmatched_tracks:self.tracks[track_idx].mark_missed()# 对于未匹配成功的detection,初始化为新的trackfor detection_idx in unmatched_detections:self._initiate_track(detections[detection_idx])...
4,代码实现
首先去GitHub官网将项目下载或者拉下来
网址:MuhammadMoinFaisal/YOLOv8-DeepSORT-Object-Tracking: YOLOv8 Object Tracking using PyTorch, OpenCV and DeepSORT (github.com)然后按照readme文档将环境配置好
pip install -e '.[dev]'
进入到detect中
cd ultralytics/yolo/v8/detect
接着得去下面的网址下载一个DeepSORT文件
https://drive.google.com/drive/folders/1kna8eWGrSfzaR6DtNJ8_GchGgPMv3VC8?usp=sharing
然后运行
python predict.py model=yolov8l.pt source="test3.mp4" show=True
结果: