EGO-Swarm 仿真环境搭建
EGO-Swarm仿真环境搭建
参考教程:
https://github.com/ZJU-FAST-Lab/ego-planner-swarm
EGO-Swarm是一种分散的异步系统解决方案,用于仅使用机载资源在未知的障碍物丰富的场景中进行多机器人自主导航。
1. 查看系统环境
要运行本仿真程序,需要保证当前环境为ubuntu18.04+ros-melodic-desktop-full
查看ubuntu版本:
rosnoetic@rosnoetic-VirtualBox:~$ lsb_release -aNo LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.6 LTS
Release: 18.04
Codename: bionic
可知,当前ubuntu版本满足18.04
查看ros版本:
rosnoetic@rosnoetic-VirtualBox:~$ rosversion -dmelodic
可知,当前ros版本满足melodic
2. 环境部署
2.1 Armadillo下载
Armadillo的官网链接如下所示:
http://arma.sourceforge.net/
执行如下指令安装Armadillo,程序中的uav_simulator需要Armadillo
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install libarmadillo-dev
2.2 EGO源码下载
执行如下指令下载EGO源码
rosnoetic@rosnoetic-VirtualBox:~$ git clone https://github.com/ZJU-FAST-Lab/ego-planner-swarm.git
下载好后即可在主目录下看到如下文件:

2.3 编译
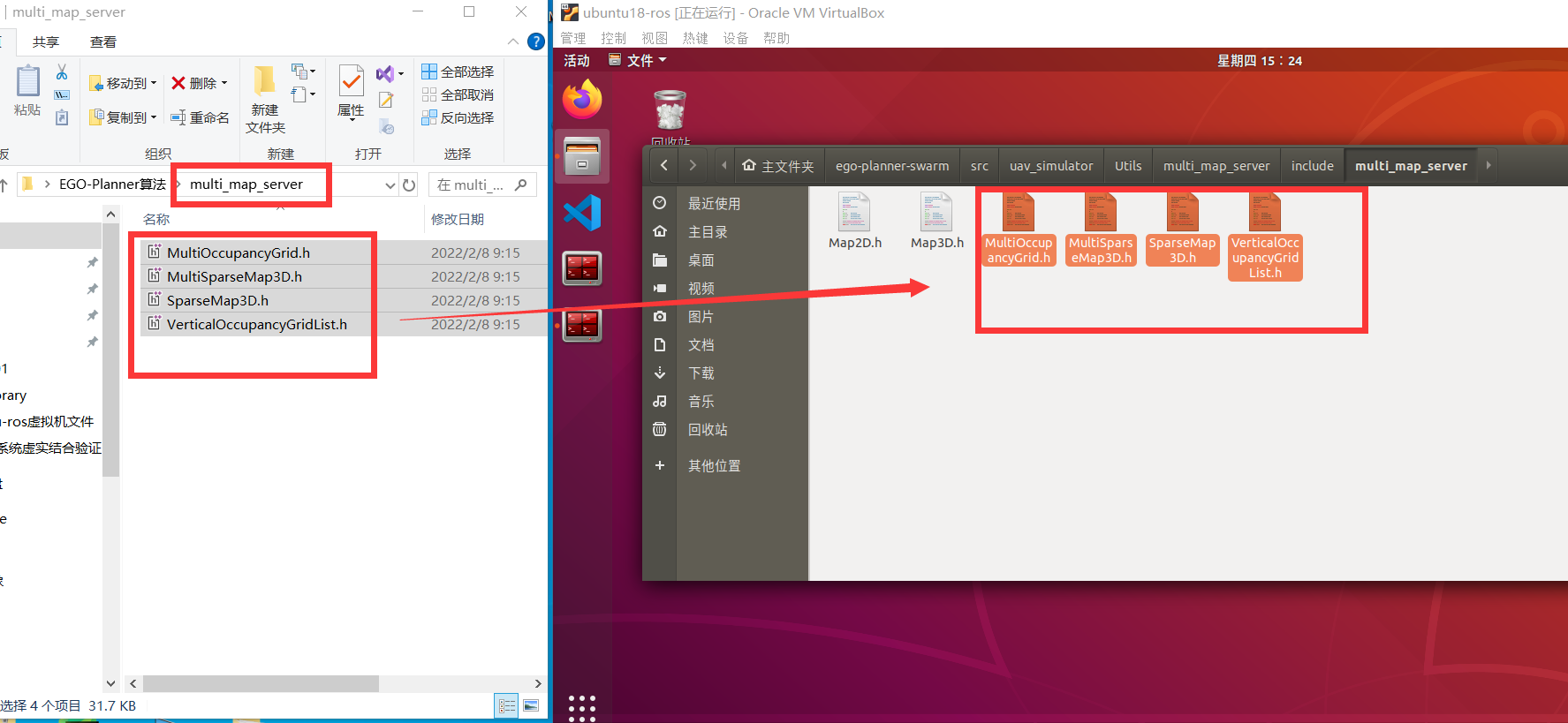
将multi_map_server文件夹下的4个.h头文件拖拽到虚拟机的
/home/rosnoetic/ego-planner-swarm/src/uav_simulator/Utils/multi_map_server/include/multi_map_server目录下
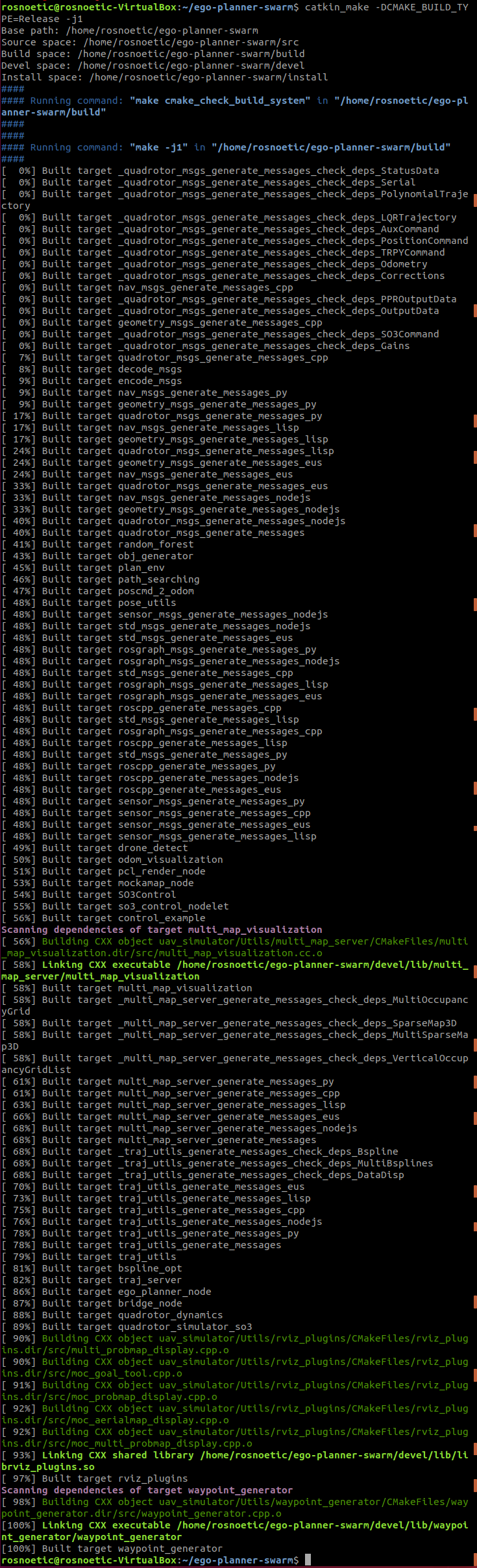
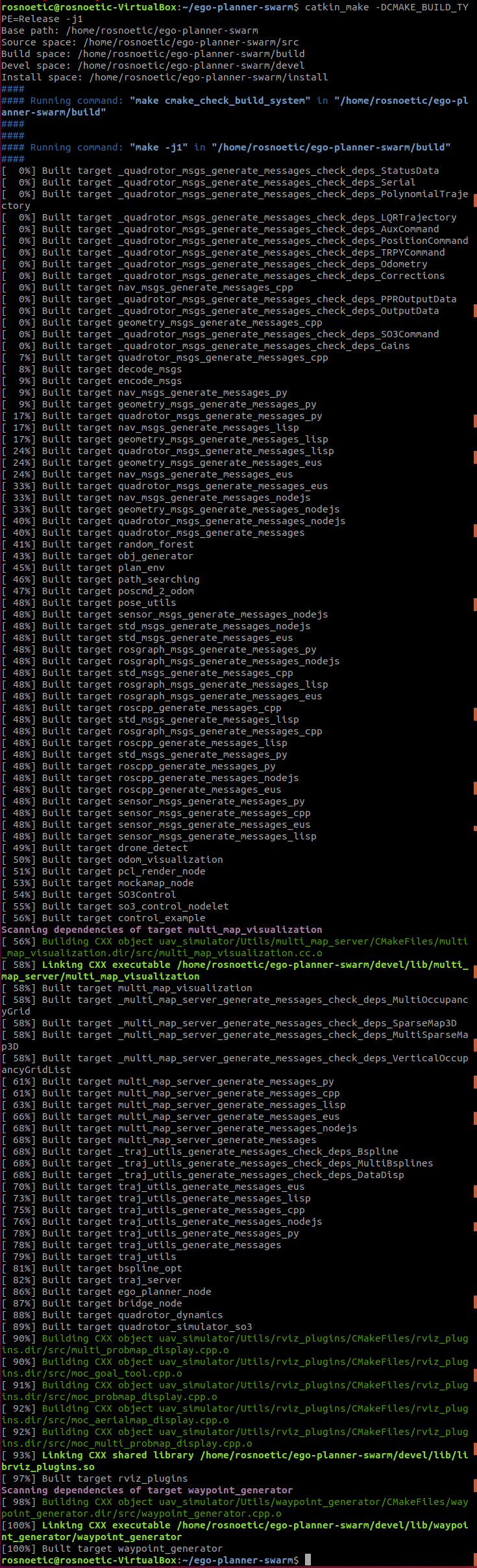
ctrl+allt+T打开终端,执行如下指令进行编译
rosnoetic@rosnoetic-VirtualBox:~$ cd ego-planner-swarm/rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ catkin_make -DCMAKE_BUILD_TYPE=Release -j1
-
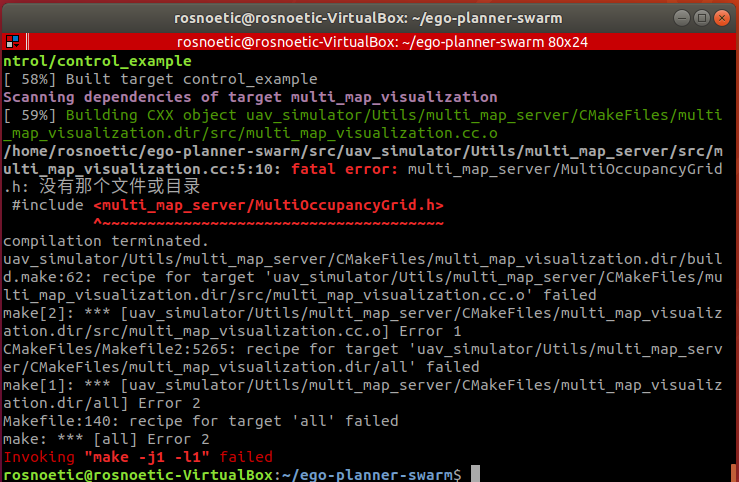
如果出现错误:fatal error: multi_map_server/MultiOccupancyGrid.h: 没有那个文件或目录
参考教程:
multi_map_server/MultiOccupancyGrid.h:没有那个文件或目录_fatal error: multi_map_server/multioccupancygrid.h-CSDN博客
出现该错误的原因还是因为缺少了
MultiOccupancyGrid.h的头文件,与之前的添加MultiOccupancyGrid.h方式不同,此时我们需要直接添加在编译后的/home/rosnoetic/ego-planner-swarm/devel/include/multi_map_server文件夹下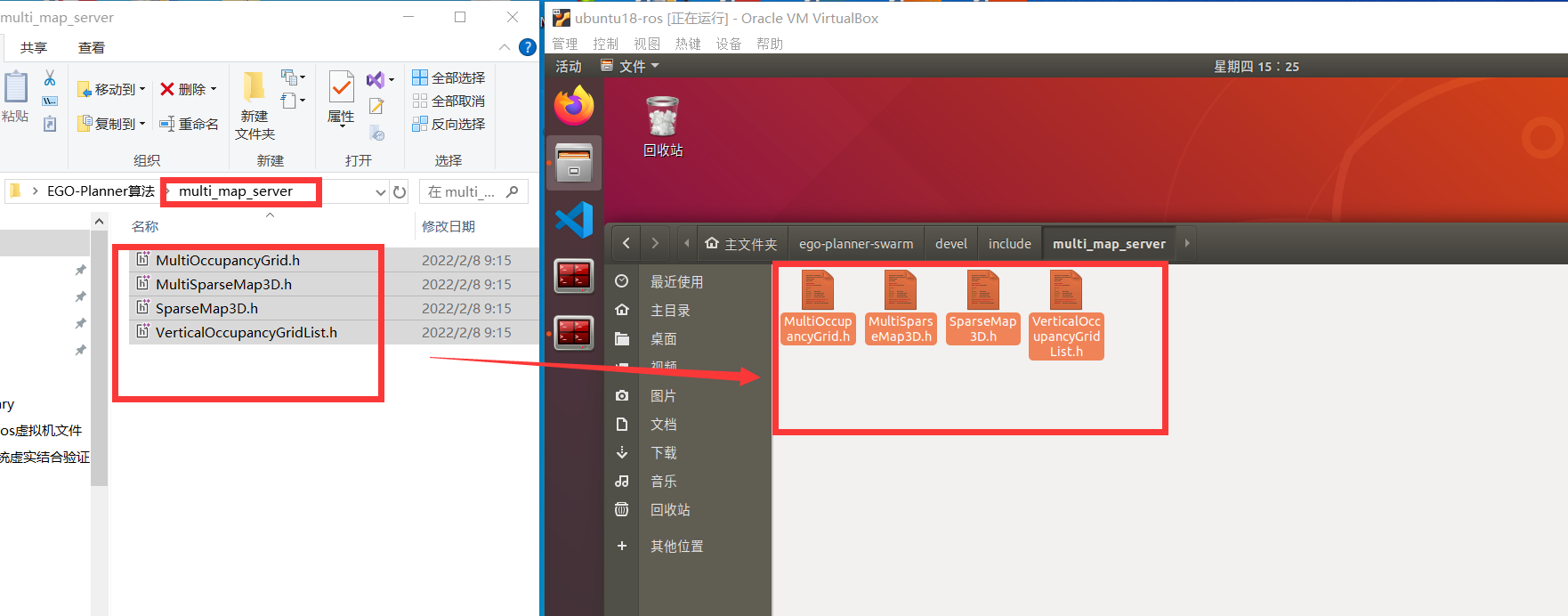
接着重新编译(注意此时不需要删除
build和devel文件夹)rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ catkin_make -DCMAKE_BUILD_TYPE=Release -j1就可以发现剩下的内容编译成功
3. 运行
ctrl+alt+T打开一个新的终端,输入如下指令,进行rviz可视化和交互
rosnoetic@rosnoetic-VirtualBox:~$ cd ego-planner-swarm/rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ source ./devel/setup.bash rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ roslaunch ego_planner rviz.launch
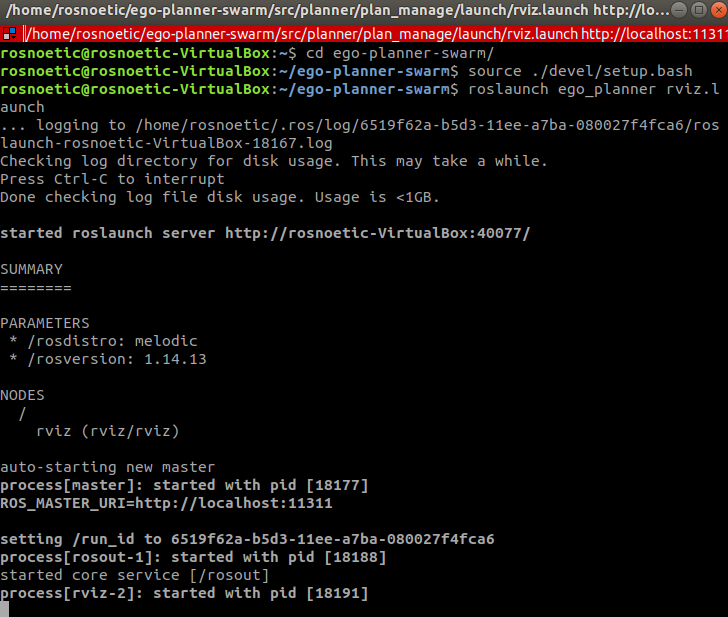
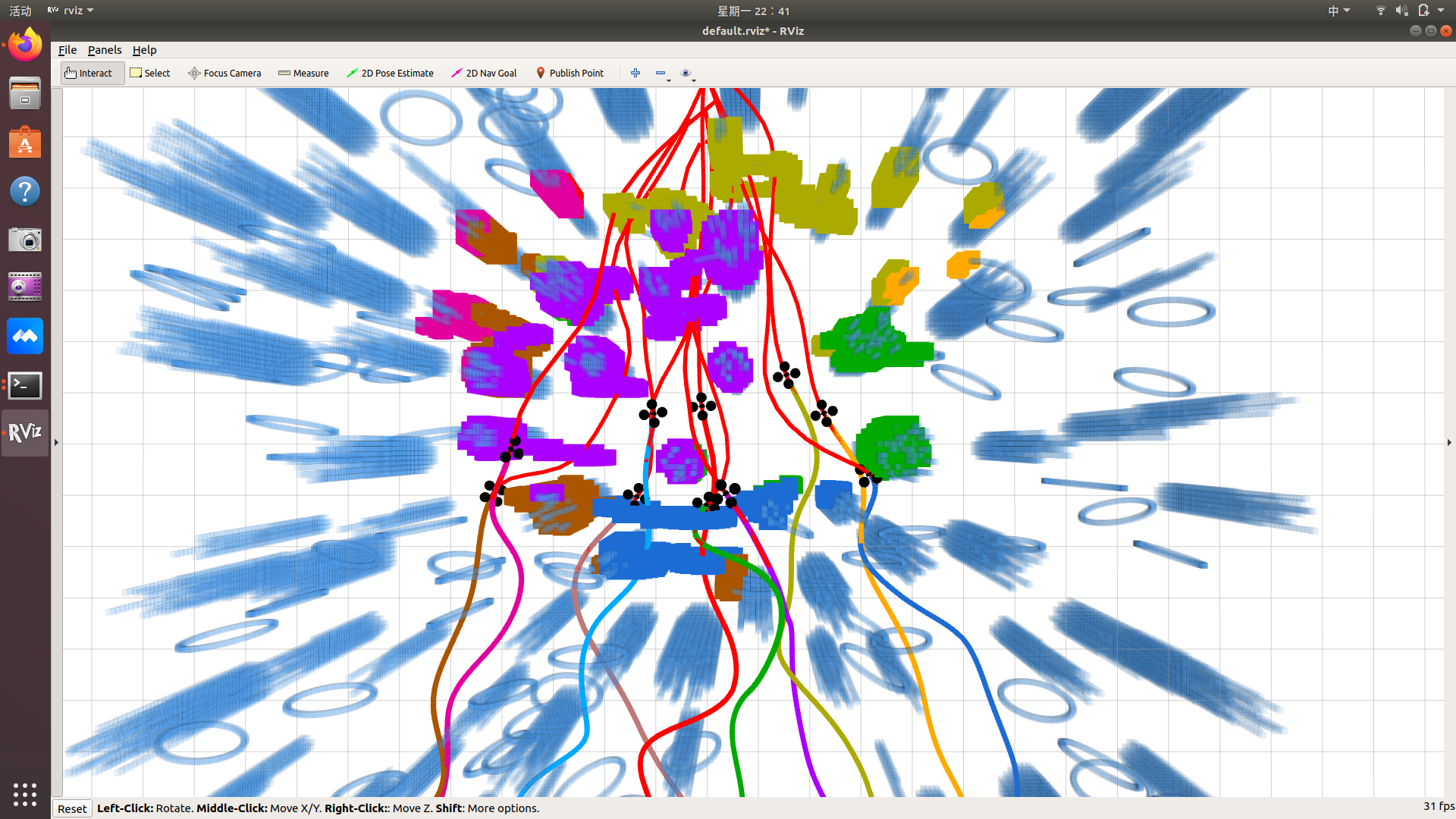
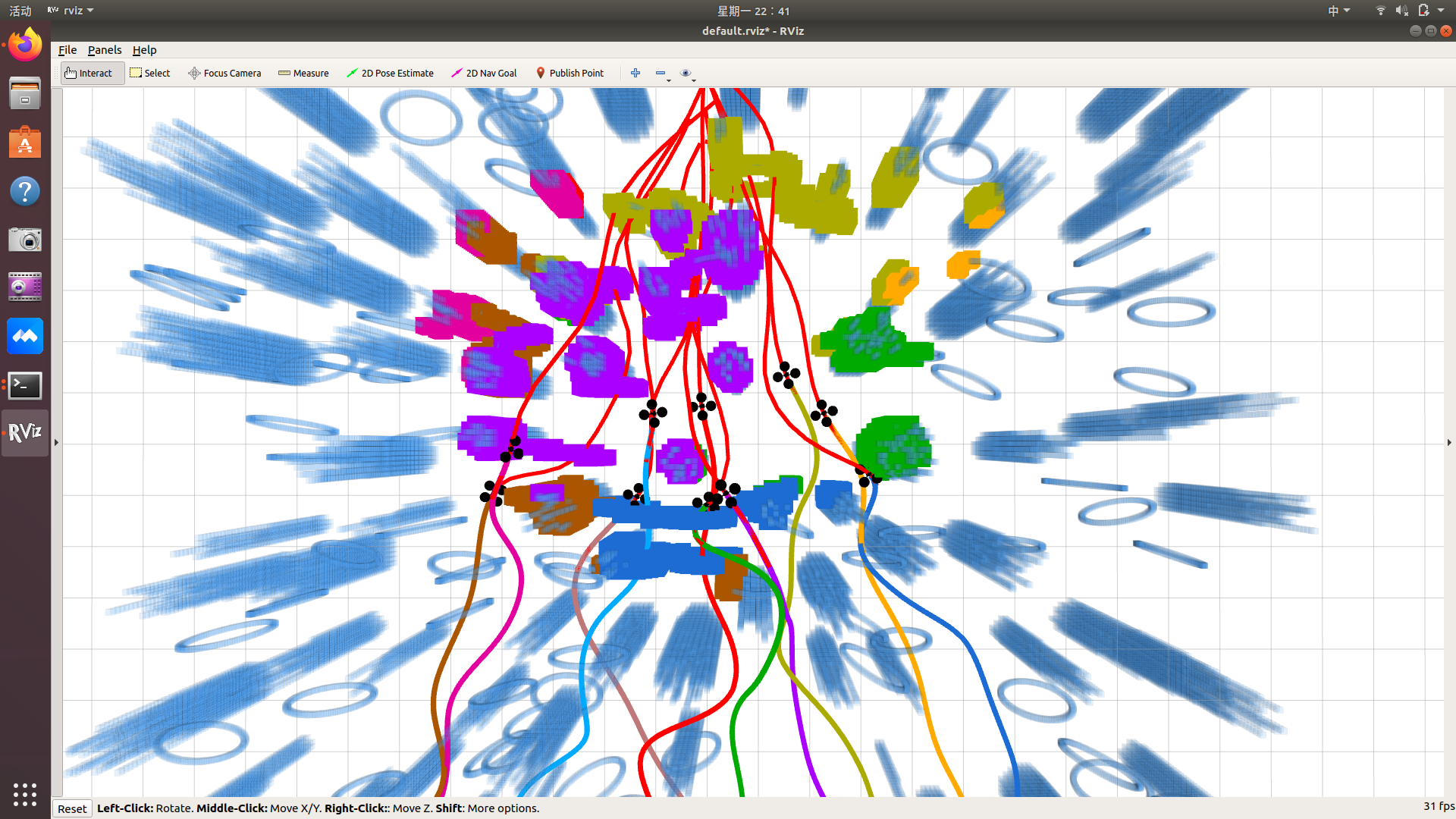
可以打开一个rviz界面
ctrl+alt+T再打开一个新的终端,输入如下指令,实现仿真规划
rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ source ./devel/setup.bash rosnoetic@rosnoetic-VirtualBox:~/ego-planner-swarm$ roslaunch ego_planner swarm.launch
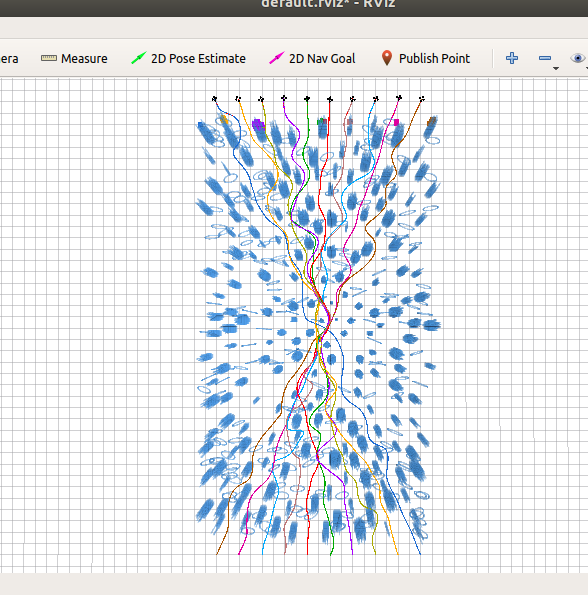
完成上述步骤后,我们看到如下所示的结果。
注:虚拟机环境下运行起来会很卡,需要等待一段时间,可以通过增加交换空间的方式来使得运行更加流畅:
-
增加交换空间
首先关闭交换分区
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile接着创建分区,
4 * 1024 = 4096创建4 G的内存分区rosnoetic@rosnoetic-VirtualBox:~$ sudo dd if=/dev/zero of=/swapfile bs=1M count=4096
继续执行如下指令:
rosnoetic@rosnoetic-VirtualBox:~$ sudo mkswap /swapfilerosnoetic@rosnoetic-VirtualBox:~$ sudo swapon /swapfile
创建完交换分区之后就可以继续编译。
也可以查看分区的大小
rosnoetic@rosnoetic-VirtualBox:~$ free -m
编译若是还不成功,试着创建更大的分区。
如果编译使用完成后,可以关闭内存。
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfilerosnoetic@rosnoetic-VirtualBox:~$ sudo rm /swapfile