C++定位new用法及注意事项
使用定位new创建对象,显式调用析构函数是必须的,这是析构函数必须被显式调用的少数情形之一!, 另有一点!!!析构函数的调用必须与对象的构造顺序相反!切记!!!
定位new的使用格式: 1.new (place_address) type 2.new (palce_address) type (initializer_list) 其中place_address必须是一个指针,initializer_list是type类型的初始化列表
使用请看下面的代码例程
#include <iostream>
#include <string>
#include <new>
using namespace std;const int BUF = 512;
class JustTesting {
private:string words;int number;
public:JustTesting(const string& s = "Just Testing", int n = 0) {words = s;number = n;cout << words << " constructed" << endl;}~JustTesting() { cout << words << " destroyed!" << endl; }void Show()const { cout << words << " , " << number << endl; }
};int main() {char* buffer = new char[BUF];//常规new在堆上申请空间cout << "\nMemory block address:\n" << "buffer: " << (void*)buffer<< "\n****************************************\n";JustTesting* pc1, * pc2;pc1 = new (buffer) JustTesting;//定位newpc2 = new JustTesting("Heap1", 20);//常规newcout << "\nMemory contents:" << endl;cout << pc1 << ": ";pc1->Show();cout << pc2 << ": ";pc2->Show();cout << "----------------------------------------\n";JustTesting* pc3, * pc4;pc3 = new (buffer)JustTesting("Bad Idea", 6);//定位newpc4 = new JustTesting("Heap2", 10);//常规newcout << "\nMemory contents:" << endl;cout << pc3 << ": ";pc3->Show();cout << pc4 << ": ";pc4->Show();delete pc2;//释放pc2申请的空间delete pc4;//释放pc4申请的空间delete[] buffer;//释放buffer指向的空间,但是这里并没有调用其析构函数//pc3->~JustTesting(); //需要显式调用构造函数//pc1->~JustTesting();cout << "Done!" << endl;return 0;
}执行结果如下:
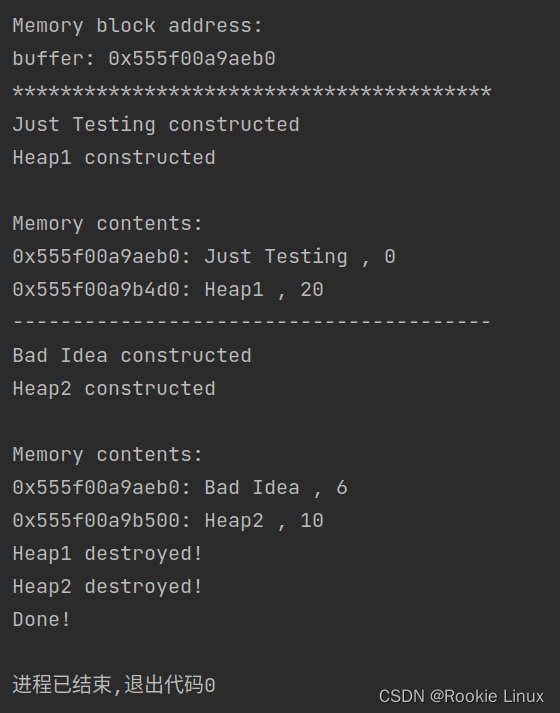
结果分析:
1.使用定位new创建的对象的地址与内存缓冲区地址一致,说明定位new并没有申请新空间,而构造函数的调用说明定位new的确调用了构造函数。
2.在使用delete回收空间时,可以发现并未回收pc1与pc3,其原因在于pc1与pc3指向的对象位于内存缓冲区,该空间并不是定位new申请,而是常规new申请的,因此我们需要delete[]回收内存缓冲区,而不是delete pc1与delete pc3
3.pc1与pc3一致,说明第一个对象被第三个覆盖!显然,如果类动态地为其成员分配内存,这将引发问题!,所以,当我们使用定位new创建对象必须自己保证不会覆盖任何不想丢失的数据!,就这个例程而言,避免覆盖,最简单的做法如下:pc1 = new (buffer) JustTesting;pc3 = new (buffer + sizeof(JustTesting)) JustTesting("Better Idea!",6);
4.delete[] buffer并未引发对象的析构!,虽然对象1及3的空间被回收,但对象1与3并未析构!这一点将时刻提醒我们使用定位new需要自己显式调用析构函数,完成对象的析构!,但该析构并不能通过delete pc1或delete pc3实现!(因为delete与定位new不能配合使用!,否则会引发运行时错误!),只能通过显式析构,如下:pc3->~JustTesting();pc1->~JustTesting();