搜维尔科技:Manus VR数据手套-适用于机器人、人工智能和机器学习解决方案
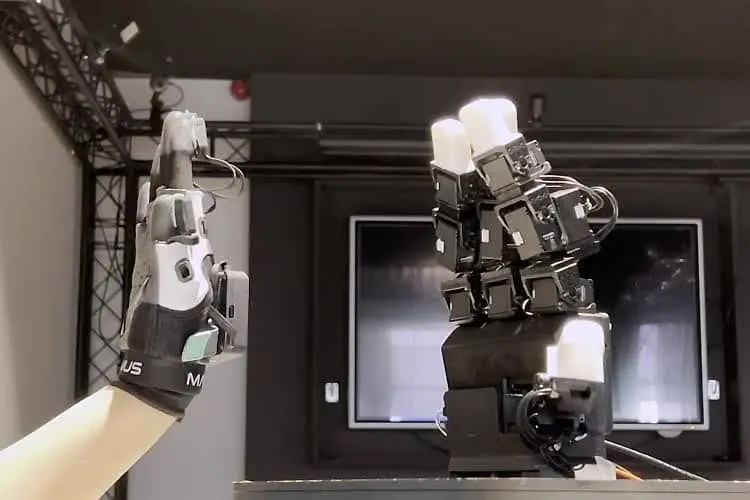
在劳动力短缺和工作环境日益严峻的今天,机器人技术正成为解决这些复杂问题的关键。MANUS™ 手指捕捉技术,结合先进的量子追踪技术,为机器人的精确操作和远程控制提供了准确且先进的解决方案。
技术亮点
实时数据捕捉:通过Quantum Tracking Technology,即使是最微妙的手势变化也能被精确捕捉,为机器人训练和远程操作提供了数据支持。
平台灵活性:MANUS™ Linux-supported SDK为人性化机器人开发带来了平台灵活性,无缝集成了机器人操作系统(ROS),并为熟悉Linux环境的开发者和研究人员提供了更广阔的社区支持。
实时控制:高精度的Quantum Metagloves能够实时操纵机器人手部,远程控制机器人在危险环境中工作,减少事故发生,提高作业安全性。
数据简化处理:CSV文件格式简化了机器学习和机器人应用中数据处理的过程,提供了一种直接的导出和转换数据的方式,从而提高了从原始数据到有价值洞察的转换效率。
应用场景
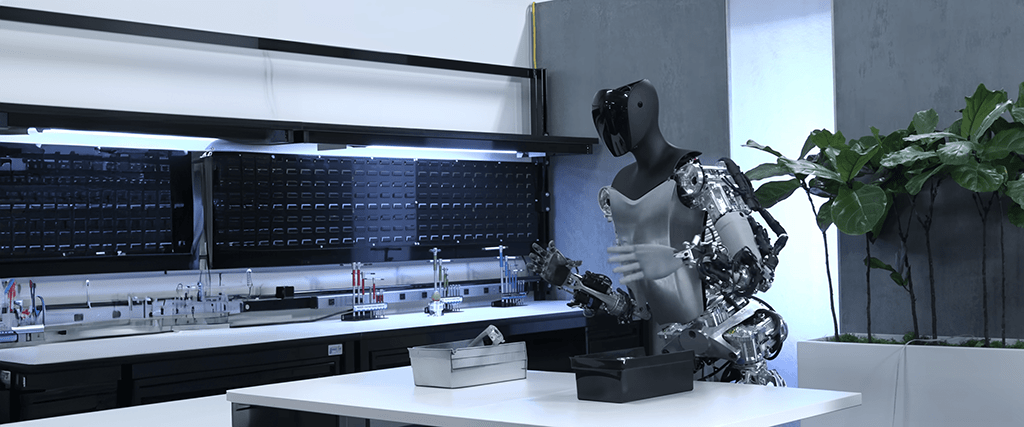
机器人训练:通过在现实生活中使用MANUS Quantum Metagloves执行动作和任务,利用Metagloves的高精度手指数据来编程机器人,实现自主操作。
远程操作:专家可以远程控制机器人,无需亲临现场,这不仅提高了工作效率,也为解决劳动力短缺问题提供了新的思路。
赋能AI:为AI系统提供丰富的、高质量的数据源。这些数据被广泛应用于AI模型的训练与优化,特别是在需要模拟真实物理动作的场景中,提高数据处理的效率和准确性。
技术优势
高精度:Quantum Metagloves提供的精确手部数据,让机器人的动作更加精细,反应更加灵敏。
实时性:实时控制功能使得机器人可以在危险环境中进行远程操作,减少了人员的安全风险。
数据友好:CSV数据格式的使用,让数据的记录、处理和分析变得更加简单和高效。
开发接口:根据不同开发需求提供SDK和CSV功能