colmap+openmvs进行三维重建流程全记录
window下的colmap+openmvs进行三维重建流程全记录
1.colmap安装与配置
可参考:https://blog.csdn.net/weixin_44153180/article/details/129334018?spm=1001.2014.3001.5501
2.openmvs安装与配置
可参考:https://blog.csdn.net/rdw1246010462/article/details/121040949
以下步骤建立在已经有colmap和openmvs的可执行程序的条件下
3.colmap生成密集点云
首先新建一个文件夹pro, 在pro文件夹内新建一个image文件夹,把需要用来重建的影像放进去。
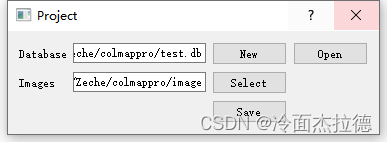
运行colmap的可执行文件,点击 File->New Project, Database那一栏点击new,在pro文件夹下新建一个test.db文件,文件路径不要有中文,Images那一栏点击select,选择刚才建的image文件夹,点击save保存
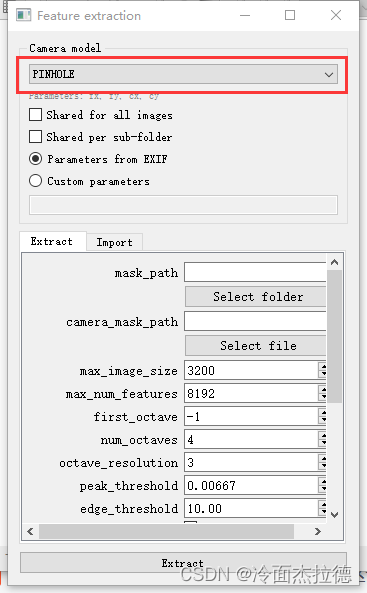
在界面中点击processing->Feature extraction,选择camera model 为PINHOLE,其他的默认参数就行,点击 Extract, 等待执行完毕
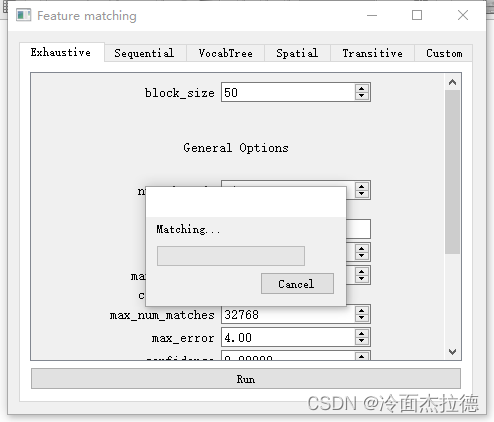
执行完成后,点击Processing->Feature matching,默认参数就行,点击 Run,等待执行完毕。
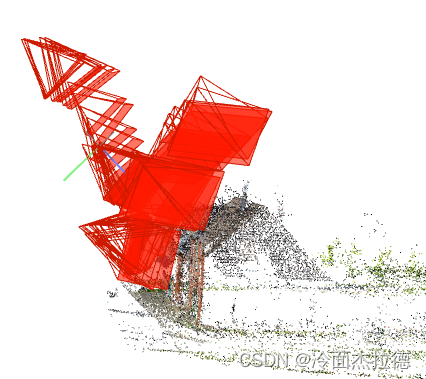
匹配完成后,点击Reconstruction ->Start reconstruction ,这一步就是SFM,执行完毕后得到类似于下面这样的稀疏点云。
在之前的image文件夹的同级目录下新建一个dense文件夹。

点击Reconstruction ->Dense reconstruction, 点击select, 选择刚才新建的dense文件夹,这里将要保存的就是dense重建的结果。依次点击Undistortion, Stereo, Fusion, 顺次执行完毕.
等待执行结束后,在colmap界面中点击File->export model as txt , 选择文件夹dense下的sparse文件夹,这是把.bin类型的sfm相关的文件转成txt格式,openmvs只支持txt格式的,所以必须转。转换后得到的文件
特别注意:打开cameras.txt看一下,如果相机模型是Pinhole,是可以的,如果不是改成pinhole,这里不管你之前选的是不是pinhole,这里都可以直接改没关系,因为openmvs只支持pinhole结果的模型。
4.openmvs 重建纹理模型
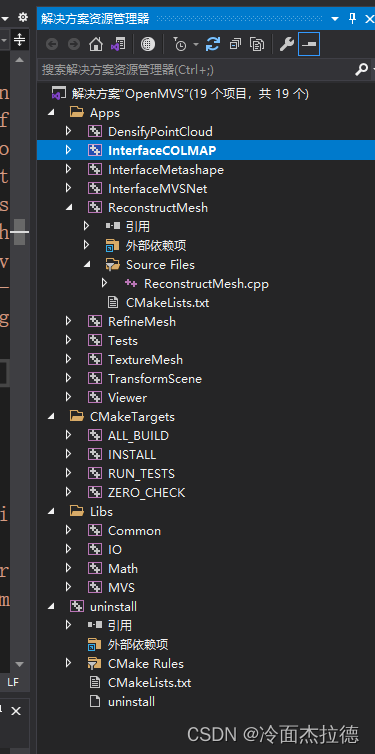
因为我是源码编译的,可以在vs2019中打开openmvs项目
首先,右键 InterfaceCOLMAP,设为启动项目
并且打开项目属性,在配置属性->调试->命令参数中填入对应的参数
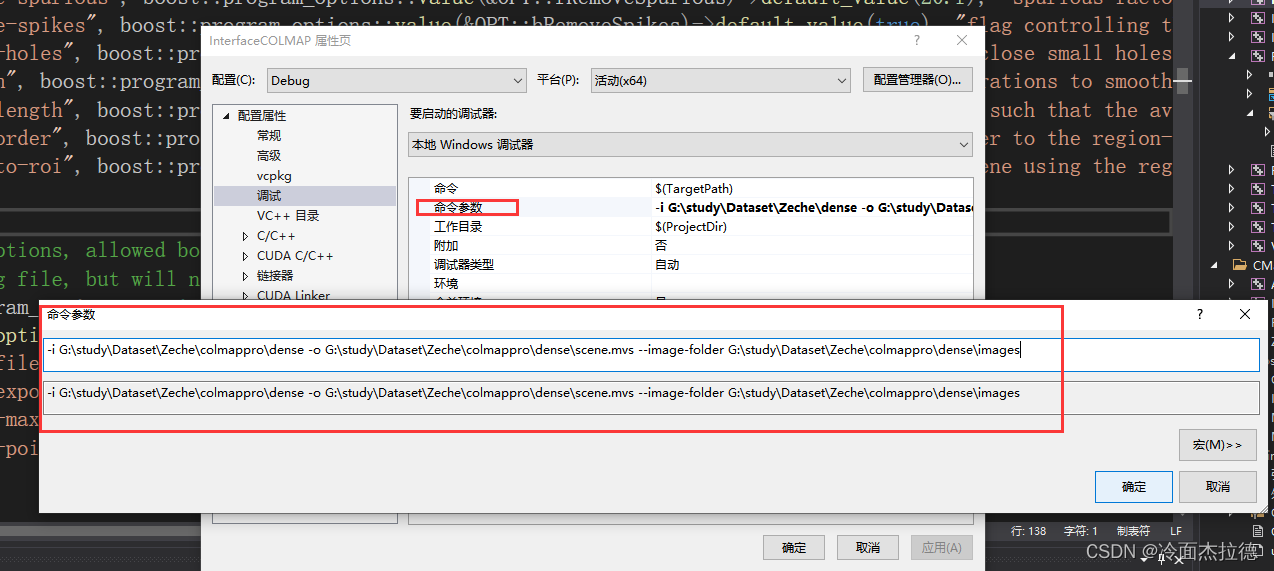
如果没有编译源码,而是直接用了编译好的可执行程序,那就在控制台入openMVS_sample的bin文件夹,执行命令:
InterfaceCOLMAP.exe -i G:\study\Dataset\Zeche\colmappro\dense -o G:\study\Dataset\Zeche\colmappro\dense\scene.mvs --image-folder G:\study\Dataset\Zeche\colmappro\dense\images
这时可以看到dense文件夹下生成了scene.mvs文件
接着可以执行mesh reconstruction, mesh refine , texture等操作
mesh reconstrction
命令参数为:
-w G:\study\Dataset\Zeche\colmappro\dense -i G:\study\Dataset\Zeche\colmappro\dense\scene.mvs -o G:\study\Dataset\Zeche\colmappro\dense\mesh.mvs
如果image不在当前文件夹,这里通过 -w 选项指定workspace的路径
mesh refine
命令参数为:
-w G:\study\Dataset\Zeche\colmappro\dense -i mesh.mvs -o refinemesh.mvs
这一步运行时间比较久,且占用内存巨大。我的电脑带不动,出现了报错,算了跳过这一步
Meshtexture
-i G:\study\Dataset\Zeche\colmappro\dense\mesh.mvs -w G:\study\Dataset\Zeche\colmappro\dense
运行完之后,下载一个meshlab查看可视化结果,下载地址:
https://github.com/cnr-isti-vclab/meshlab/releases
5.mesh 结果

我的评价是,略粗糙。。。。可能是没有meshrefine成功的原因…
参考博客
https://blog.csdn.net/tangli_sea/article/details/108569035?spm=1001.2014.3001.5506