UNet进行病理图像分割
数据集链接:https://pan.baidu.com/s/1IBe_P0AyHgZC39NqzOxZhA?pwd=nztc
提取码:nztc
- UNet模型
import torch
import torch.nn as nnclass conv_block(nn.Module):def __init__(self, ch_in, ch_out):super(conv_block, self).__init__()self.conv = nn.Sequential(nn.Conv2d(ch_in, ch_out, kernel_size=3, stride=1, padding=1, bias=True),nn.BatchNorm2d(ch_out),nn.ReLU(inplace=True),nn.Conv2d(ch_out, ch_out, kernel_size=3, stride=1, padding=1, bias=True),nn.BatchNorm2d(ch_out),nn.ReLU(inplace=True))def forward(self, x):x = self.conv(x)return xclass up_conv(nn.Module):def __init__(self, ch_in, ch_out):super(up_conv, self).__init__()self.up = nn.Sequential(nn.Upsample(scale_factor=2),nn.Conv2d(ch_in, ch_out, kernel_size=3, stride=1, padding=1, bias=True),nn.BatchNorm2d(ch_out),nn.ReLU(inplace=True))def forward(self, x):x = self.up(x)return x
class UNet(nn.Module):def __init__(self, img_ch=3, output_ch=1):super(UNet, self).__init__()self.Maxpool = nn.MaxPool2d(kernel_size=2, stride=2)self.Conv1 = conv_block(ch_in=img_ch, ch_out=64)self.Conv2 = conv_block(ch_in=64, ch_out=128)self.Conv3 = conv_block(ch_in=128, ch_out=256)self.Conv4 = conv_block(ch_in=256, ch_out=512)self.Conv5 = conv_block(ch_in=512, ch_out=1024)self.Up5 = up_conv(ch_in=1024, ch_out=512)self.Up_conv5 = conv_block(ch_in=1024, ch_out=512)self.Up4 = up_conv(ch_in=512, ch_out=256)self.Up_conv4 = conv_block(ch_in=512, ch_out=256)self.Up3 = up_conv(ch_in=256, ch_out=128)self.Up_conv3 = conv_block(ch_in=256, ch_out=128)self.Up2 = up_conv(ch_in=128, ch_out=64)self.Up_conv2 = conv_block(ch_in=128, ch_out=64)self.Conv_1x1 = nn.Conv2d(64, output_ch, kernel_size=1, stride=1, padding=0)def forward(self, x):# encoding pathx1 = self.Conv1(x)x2 = self.Maxpool(x1)x2 = self.Conv2(x2)x3 = self.Maxpool(x2)x3 = self.Conv3(x3)x4 = self.Maxpool(x3)x4 = self.Conv4(x4)x5 = self.Maxpool(x4)x5 = self.Conv5(x5)# decoding + concat pathd5 = self.Up5(x5)d5 = torch.cat((x4, d5), dim=1)d5 = self.Up_conv5(d5)d4 = self.Up4(d5)d4 = torch.cat((x3, d4), dim=1)d4 = self.Up_conv4(d4)d3 = self.Up3(d4)d3 = torch.cat((x2, d3), dim=1)d3 = self.Up_conv3(d3)d2 = self.Up2(d3)d2 = torch.cat((x1, d2), dim=1)d2 = self.Up_conv2(d2)d1 = self.Conv_1x1(d2)output = torch.sigmoid(d1) # 在最后加上Sigmoid激活函数return output
- 数据加载
import os
from PIL import Image
from torch.utils.data import Dataset
from torchvision import transformsclass SegmentationDataset(Dataset):def __init__(self, image_dir, mask_dir, output_size=(256, 256)):self.image_dir = image_dirself.mask_dir = mask_dirself.image_list = os.listdir(image_dir)self.output_size = output_size# 定义图像和掩码的变换self.image_transform = transforms.Compose([transforms.Resize(self.output_size),transforms.ToTensor()])self.mask_transform = transforms.Compose([transforms.Resize(self.output_size),transforms.ToTensor()])def __len__(self):return len(self.image_list)def __getitem__(self, idx):image_name = self.image_list[idx]image_path = os.path.join(self.image_dir, image_name)mask_path = os.path.join(self.mask_dir, image_name)image = Image.open(image_path).convert("RGB") # 确保是RGBmask = Image.open(mask_path).convert("L") # 确保是灰度图像image = self.image_transform(image)mask = self.mask_transform(mask)return image, mask
- 训练和测试。训练函数中保存的最好模型后缀最大(因为loss小才保存当前这个epoch的模型,我训练的最好模型是第171轮产生的),测试代码包含计算模型性能指标的代码和保存结果图片的代码。
import os
import numpy as np
import torch
import torch.optim as optim
from sklearn.metrics import confusion_matrix
from torch import nn
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
from tqdm import tqdm
from UNet import UNet
from DataLoader2 import SegmentationDataset# IoU计算
def compute_iou(pred_mask, true_mask):smooth = 1e-6 # 避免分母为0pred_mask = (pred_mask > 0.5).float()true_mask = (true_mask > 0.5).float()intersection = (pred_mask * true_mask).sum()union = pred_mask.sum() + true_mask.sum() - intersectionreturn (intersection + smooth) / (union + smooth)# Dice系数计算
def compute_dice(pred_mask, true_mask):smooth = 1e-6 # 避免分母为0pred_mask = (pred_mask > 0.5).float()true_mask = (true_mask > 0.5).float()intersection = (pred_mask * true_mask).sum()return (2. * intersection + smooth) / (pred_mask.sum() + true_mask.sum() + smooth)# 精度、召回率和F1分数计算
def compute_precision_recall_f1(pred_mask, true_mask):pred_mask = (pred_mask > 0.5).numpy().astype(int)true_mask = (true_mask > 0.5).numpy().astype(int)# 将mask平展为一维数组pred_mask_flat = pred_mask.flatten()true_mask_flat = true_mask.flatten()conf_matrix = confusion_matrix(true_mask_flat, pred_mask_flat)tn, fp, fn, tp = conf_matrix.ravel()precision = tp / (tp + fp)recall = tp / (tp + fn)f1_score = 2 * (precision * recall) / (precision + recall)return precision, recall, f1_score# 训练函数
def train():model = UNet()dataset = SegmentationDataset('./dataset_exp2/train/image', './dataset_exp2/train/label')dataloader = DataLoader(batch_size=16, shuffle=True, dataset=dataset)# 训练参数num_epochs = 200learning_rate = 1e-4# 损失函数和优化器criterion = nn.BCELoss()optimizer = optim.Adam(model.parameters(), lr=learning_rate)# 设备device = torch.device('cuda:3' if torch.cuda.is_available() else 'cpu')model = model.to(device)model.train()best_loss = float('inf')for epoch in range(num_epochs):epoch_loss = 0for images, labels in dataloader:images = images.to(device)labels = labels.to(device)outputs = model(images)loss = criterion(outputs, labels)optimizer.zero_grad()loss.backward()optimizer.step()epoch_loss += loss.item()if epoch_loss < best_loss:best_loss = epoch_losstorch.save(model.state_dict(), f'./save_model_UNet/res_{epoch + 1}.pth')print(f'Epoch {epoch + 1}/{num_epochs}, Loss: {epoch_loss / len(dataloader)}')def test():model = UNet()# 确保模型在CPU上model.load_state_dict(torch.load('./save_model_UNet/res_171.pth'))save_dir = './test_results_UNet'model.eval()dataset = SegmentationDataset('./dataset_exp2/test/image', './dataset_exp2/test/label')dataloader = DataLoader(batch_size=1, shuffle=False, dataset=dataset)iou_list = []dice_list = []precision_list = []recall_list = []f1_list = []plt.ion()with torch.no_grad():for idx, (images, labels) in tqdm(enumerate(dataloader)):pre = model(images)img_pre = torch.squeeze(pre)img_true = torch.squeeze(labels)iou = compute_iou(img_pre, img_true)dice = compute_dice(img_pre, img_true)precision, recall, f1_score = compute_precision_recall_f1(img_pre, img_true)img_pre = img_pre.numpy()img_true = img_true.numpy()img_x = torch.squeeze(images).numpy().transpose(1, 2, 0)img_x = (img_x * 255).astype(np.uint8) # 恢复到0-255的范围# 保存结果plt.figure(figsize=(12, 4))plt.subplot(1, 3, 1)plt.title('Input Image')plt.imshow(img_x)plt.axis('off')plt.subplot(1, 3, 2)plt.title('True Mask')plt.imshow(img_true, cmap='gray')plt.axis('off')plt.subplot(1, 3, 3)plt.title('UNet Predicted Mask')plt.imshow(img_pre, cmap='gray')plt.axis('off')plt.savefig(os.path.join(save_dir, f'result_{idx + 1}.png'))plt.close() # 关闭当前figure,避免内存占用过多iou_list.append(iou.item())dice_list.append(dice.item())precision_list.append(precision)recall_list.append(recall)f1_list.append(f1_score)plt.ioff() # 关闭交互模式print(f'Results saved in {save_dir}')print(f'Average IoU: {np.mean(iou_list)}')print(f'Average Dice Coefficient: {np.mean(dice_list)}')print(f'Average Precision: {np.mean(precision_list)}')print(f'Average Recall: {np.mean(recall_list)}')print(f'Average F1 Score: {np.mean(f1_list)}')if __name__ == '__main__':print('++++++++++++++++train++++++++++++++++')train()print('++++++++++++++++test++++++++++++++++')test()
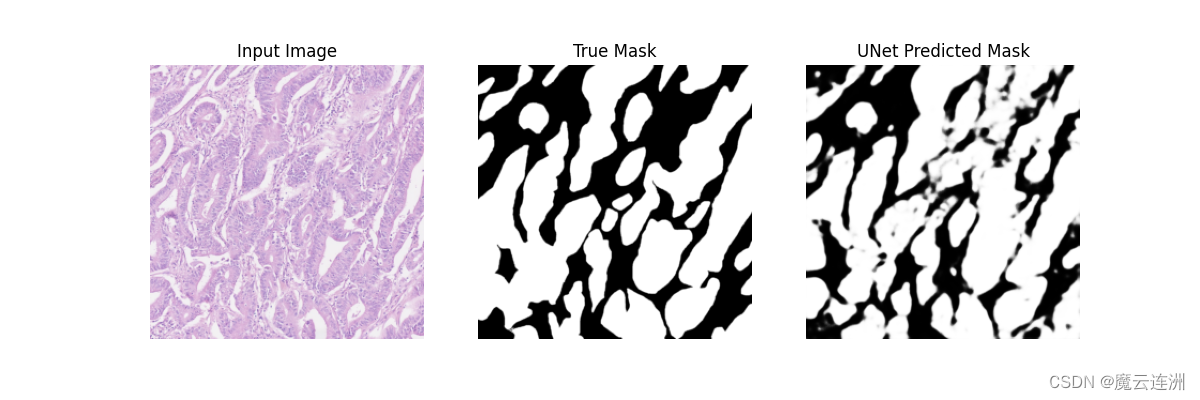
测试效果: