面向高精度导航定位领域的UM980RTK定位模块
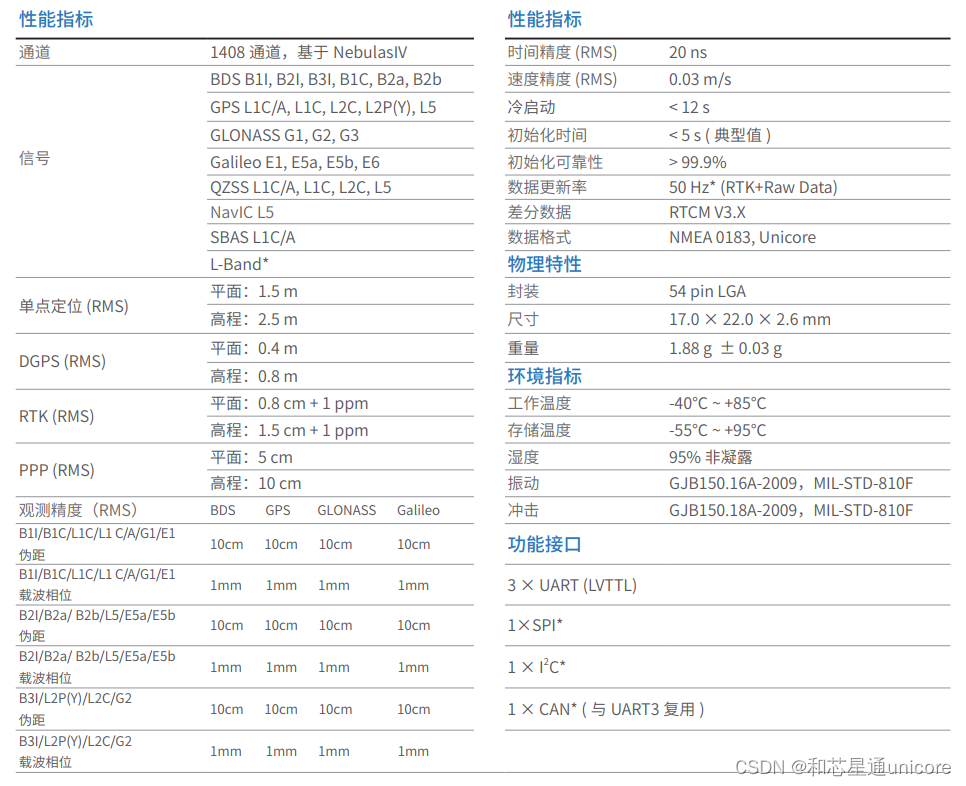
 UM980 是和芯星通自主研发的新一代 BDS/GPS/GLONASS/Galileo/QZSS 全系统全频高精度 RTK 定位模块,基于和芯星通自主研发的新一代射频基带及高精度算法一体化GNSS SoC 芯片—NebulasIV 设计。可同时跟踪 BDS, GPS, GLONASS, Galileo, QZSS, NavIC, SBAS, L-Band* 等全系统全频点。内嵌的多频点抗干扰技术,完成增强的多模多频 RTK 引擎解算,显著改善城市街区和树荫等复杂环境下的 RTK 初始化速度、测量精度和可靠性。面向精准农业、测量测绘等高精度导航定位领域。
UM980 是和芯星通自主研发的新一代 BDS/GPS/GLONASS/Galileo/QZSS 全系统全频高精度 RTK 定位模块,基于和芯星通自主研发的新一代射频基带及高精度算法一体化GNSS SoC 芯片—NebulasIV 设计。可同时跟踪 BDS, GPS, GLONASS, Galileo, QZSS, NavIC, SBAS, L-Band* 等全系统全频点。内嵌的多频点抗干扰技术,完成增强的多模多频 RTK 引擎解算,显著改善城市街区和树荫等复杂环境下的 RTK 初始化速度、测量精度和可靠性。面向精准农业、测量测绘等高精度导航定位领域。



产品特点
» 基于最新一代 NebulasIV 射频基带及高精度算法一体化 GNSS SoC 芯片
» 全系统全频 RTK 引擎及满天星 RTK 技术
» 瞬时 RTK 初始化技术
» 60 dB 窄带抗干扰技术,支持干扰检测
» 支持 Heading2 定向技术
» 支持 STANDALONE 单站高精度定位
» 支持 B2b-PPP 和 E6-HAS
注:如遇产品升级更新,产品参数可能随之发生变化,最新产品参数请以和芯星通官网为准。