236、二叉树的最近公共祖先
前提:
- 所有
Node.val互不相同。 p != qp和q均存在于给定的二叉树中。
代码如下:
class Solution {
public:TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {if (root == q || root == p || root == NULL) return root;TreeNode* left = lowestCommonAncestor(root->left, p, q);TreeNode* right = lowestCommonAncestor(root->right, p, q);if (left != NULL && right != NULL) return root;if (left == NULL && right != NULL) return right;else if (left != NULL && right == NULL) return left;else { // (left == NULL && right == NULL)return NULL;}}
};注意点:
-
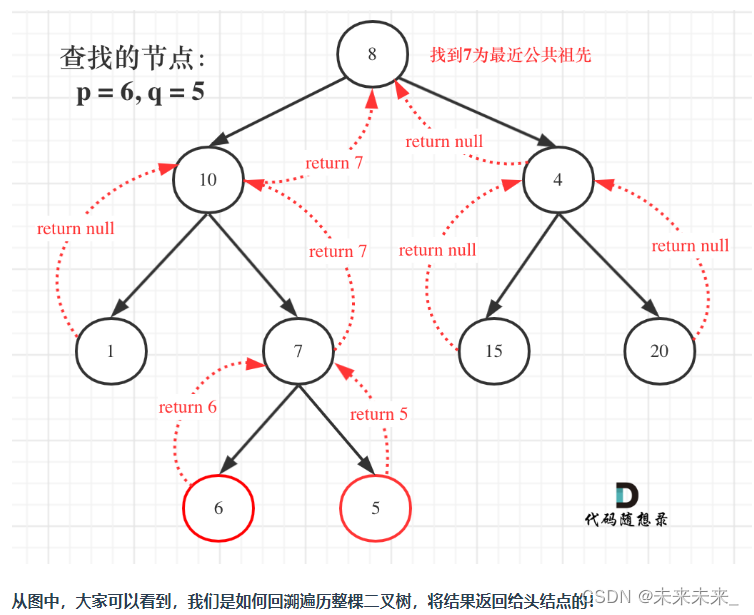
求最小公共祖先,需要从底向上遍历,那么二叉树,只能通过后序遍历(即:回溯)实现从底向上的遍历方式。
-
在回溯的过程中,必然要遍历整棵二叉树,即使已经找到结果了,依然要把其他节点遍历完,因为要使用递归函数的返回值(也就是代码中的left和right)做逻辑判断。
-
要理解如果返回值left为空,right不为空为什么要返回right,为什么可以用返回right传给上一层结果。
形象化表示就是从root节点开始派出左右两个侦察兵,先判断他们是不是目标值,如果不是就让他们各自在探查自己的左右两个侦察兵是不是,不是就接着递归,直到有一个找到了目标值,就将找到这个目标值的侦察兵的信息记录一层一层传递回来,若有一个节点的左右侦察兵同时接到了探查信息,就将这个节点逐级返回。