激光与相机融合标定汇总:提升融合算法的精度与可靠性(附github地址)
前言
随着科技的飞速发展,激光技术与相机技术的融合已成为推动智能化影像发展的重要力量。这种融合不仅提高了成像的精度和效率,还为相关行业带来了革命性的变革。在这篇博客中,我们将深入探讨激光与相机融合标定的原理及其在各个领域的应用前景。
一、激光与相机融合标定的原理
激光与相机融合标定是一种基于激光测距和相机成像技术的综合标定方法。通过激光测距获取目标点的三维坐标,结合相机拍摄的二维图像信息,实现三维空间与二维平面的精确对应。这一过程涉及多个关键步骤,包括激光扫描、图像处理、坐标转换和融合算法等。
二、标定算法分类
1、采用标定物体(一般为棋盘格,ArUco,也可以是矩形板上镂空出特定形状)
1.0 CamLaserCalibraTool
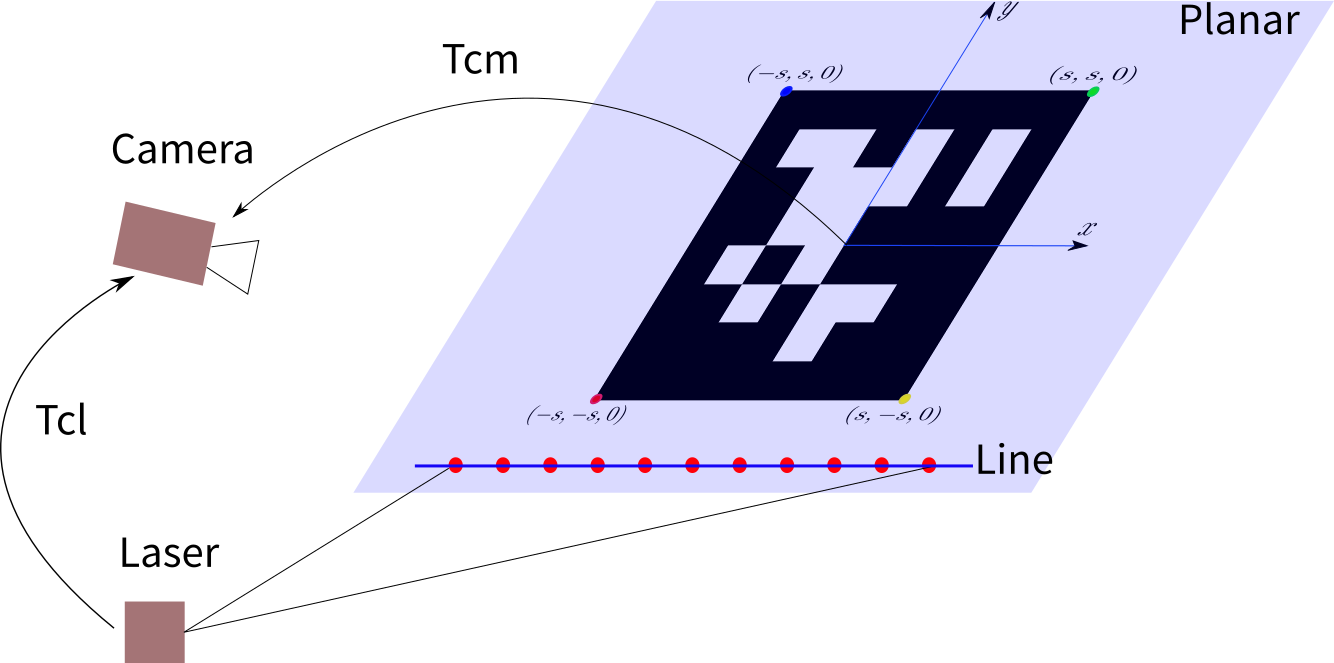
标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数 $ T_{cl} $ 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
1.1 OpenCalib/JointCalib
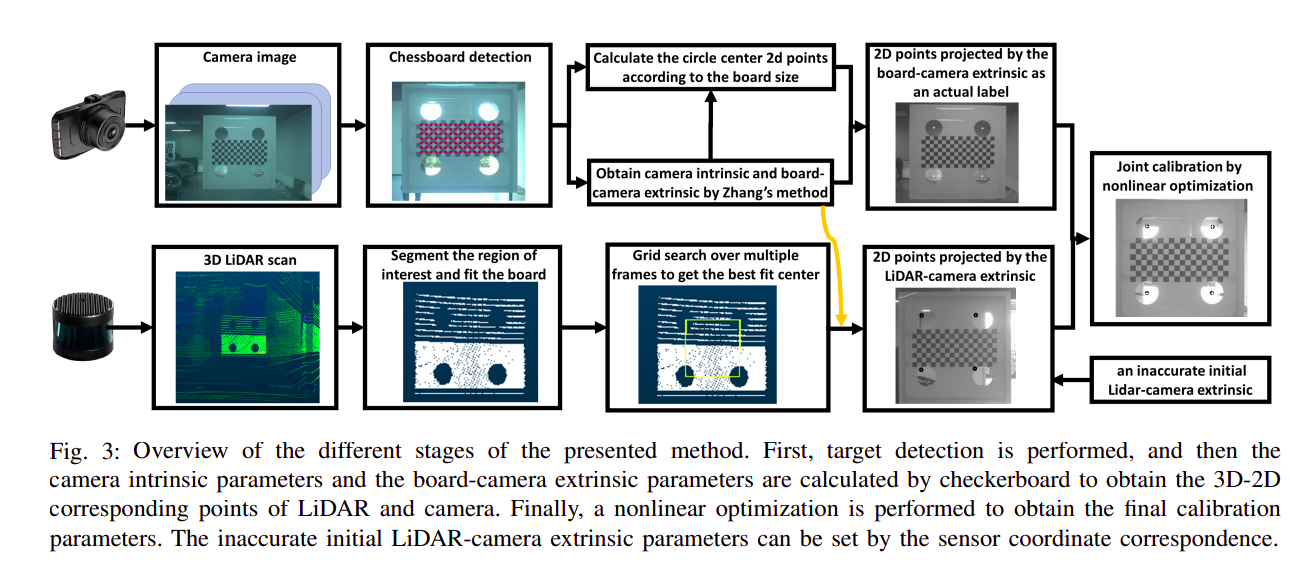
基于2D-3D correspondence*,首先进行目标检测,然后通过棋盘格计算相机内参数和板相机外参数得到3D-2D激光雷达和相机的对应点。最后进行非线性优化,得到最终的标定值
参数.

二.无特定目标物标定
2.1 基于运动的方法**
multiple-cameras-and-3D-LiDARs-extrinsic-calibration
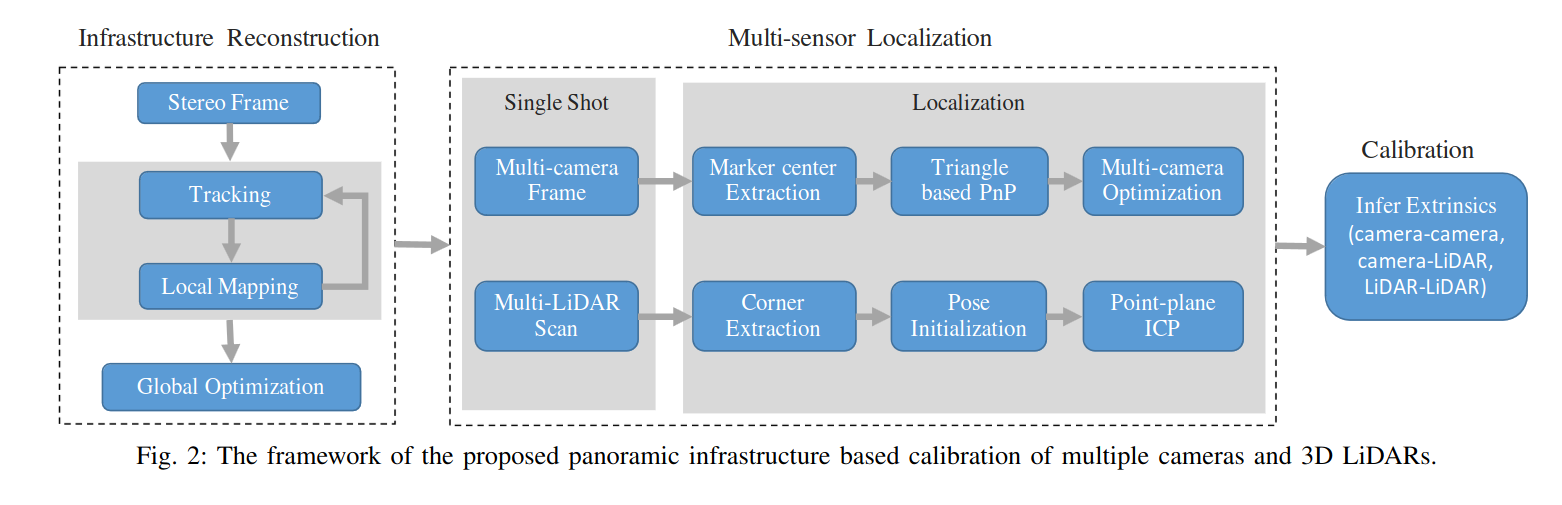
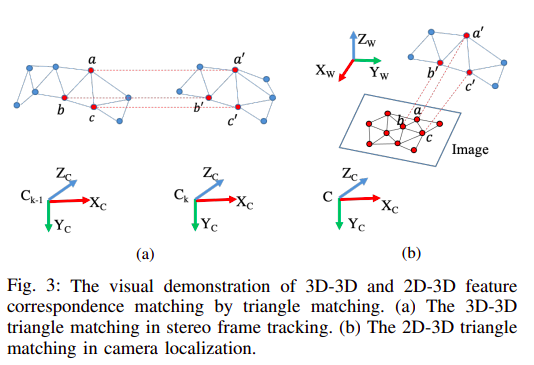
联合3D-3D和2D-3D功能的视觉演示通过三角形匹配进行对应匹配。3D-3D
立体帧跟踪中的三角形匹配。2D-3D 三角形相机定位匹配。
2.2 基于场景检测检测的方法
2.2.1传统方法
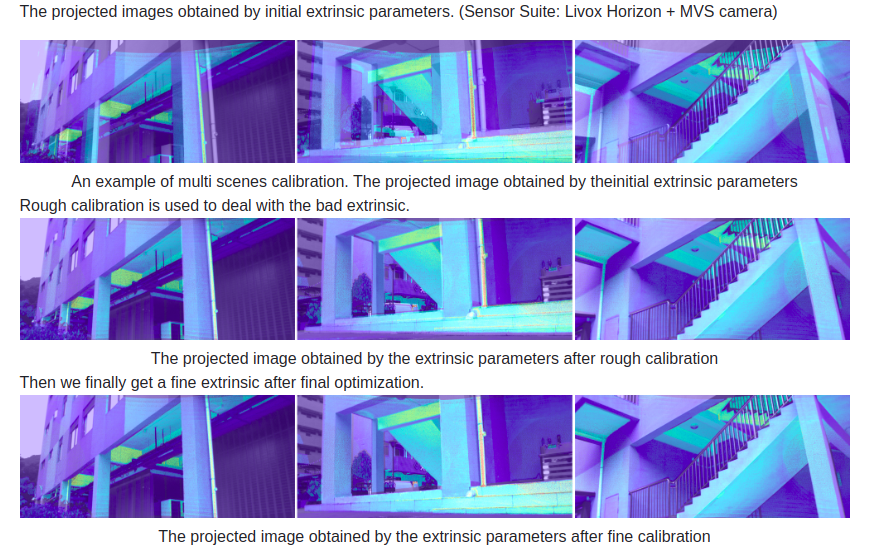
livox_camera_calib
基于边缘信息检测匹配的方法
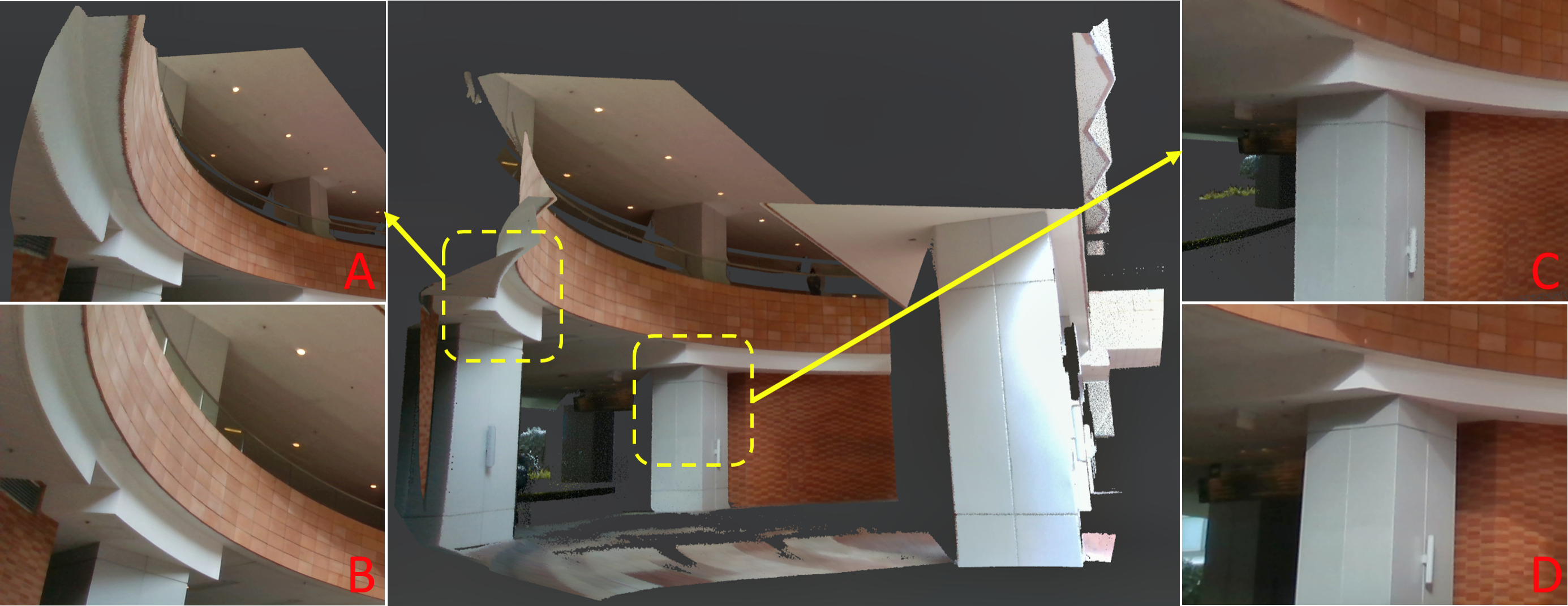
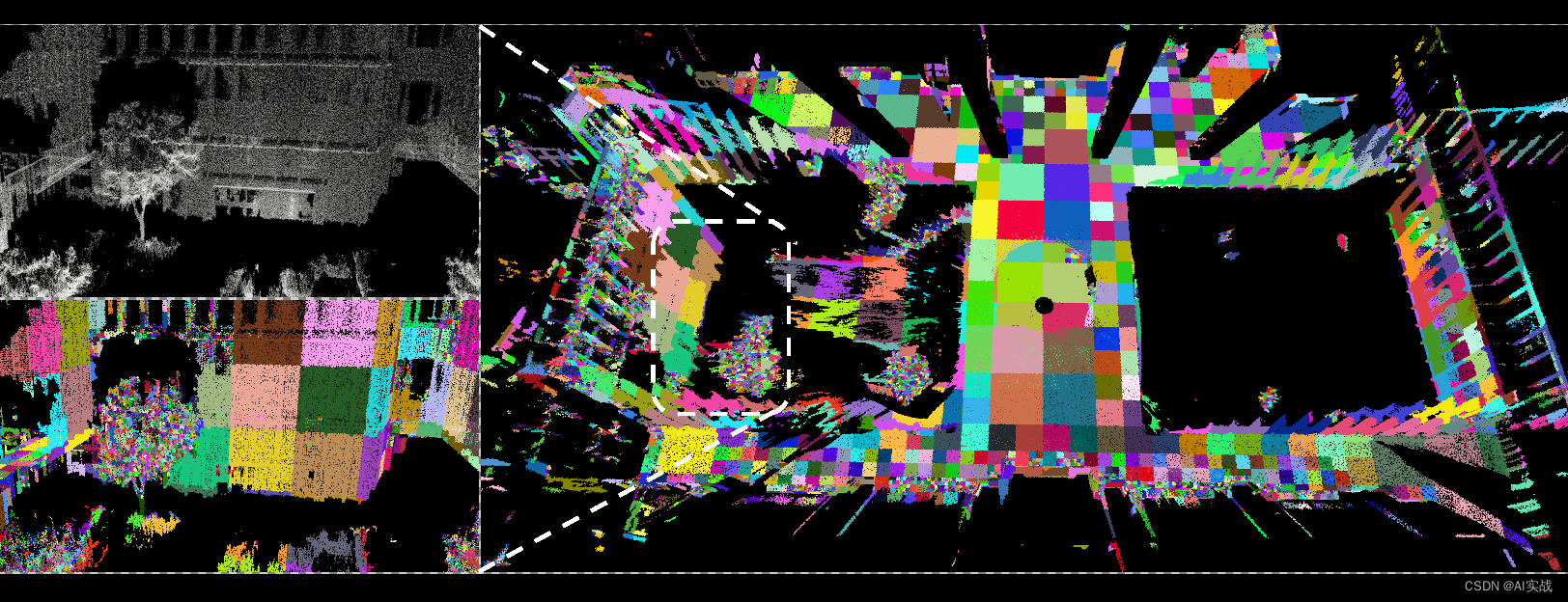
mlcc
基于图片快与点云特征匹配,实现了自适应体素化以加速特征对应匹配过程。点云图被动态分割成大小不同的体素,使得每个体素中仅包含一个平面特征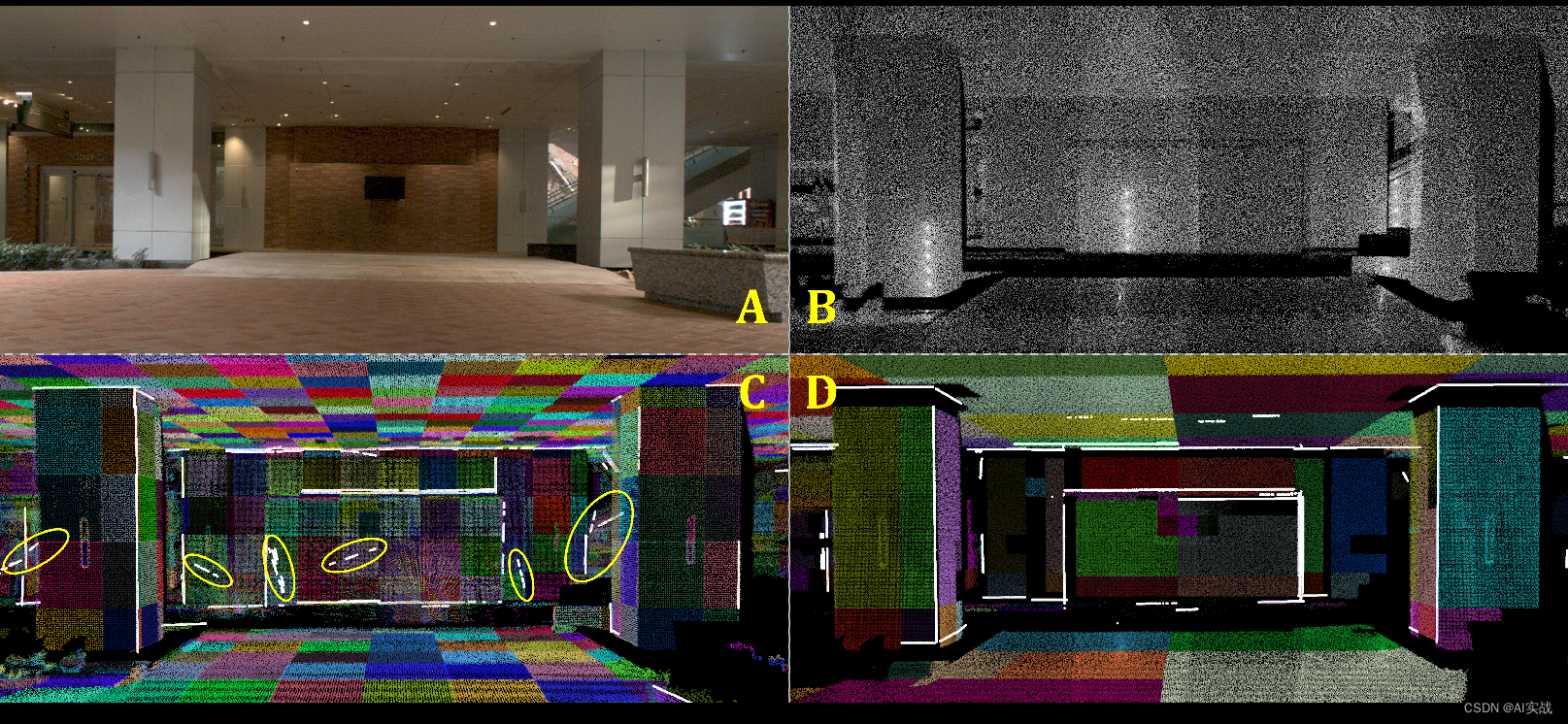
2.2.2 深度学习
LCCNet
LCCNet 是一个在线激光雷达相机自校准网络(LCCNet),可以进行端到端训练并实时预测外部参数。在 LCCNet 中,我们利用成本体积层来表达 RGB 图像特征和从点云投影的深度图像之间的外参。
总结:
激光与相机融合标定是计算机视觉领域的一个重要研究方向。通过建立激光雷达坐标系与相机坐标系之间的转换关系,可以实现激光点云与图像像素之间的准确匹配
关注我的公众号auto_driver_ai(Ai fighting), 第一时间获取更新内容。