基于GA遗传算法的多机无源定位系统GDOP优化matlab仿真
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
5.完整程序
1.程序功能描述
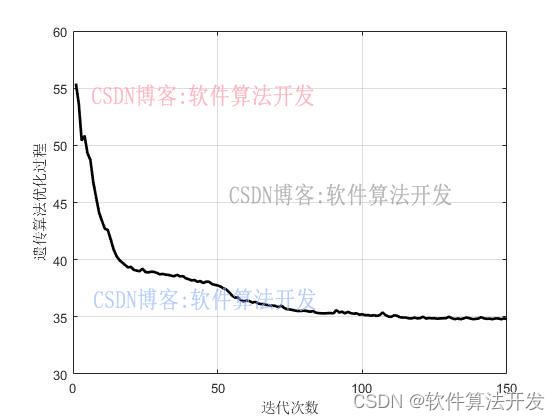
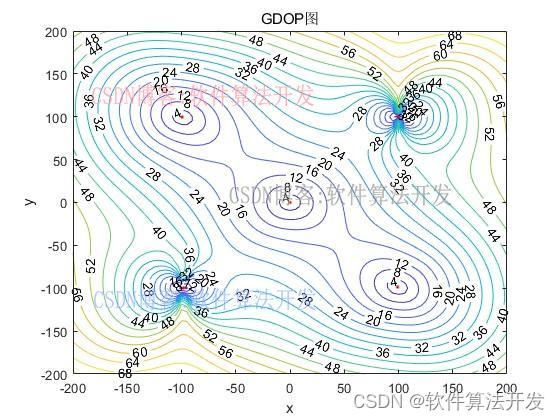
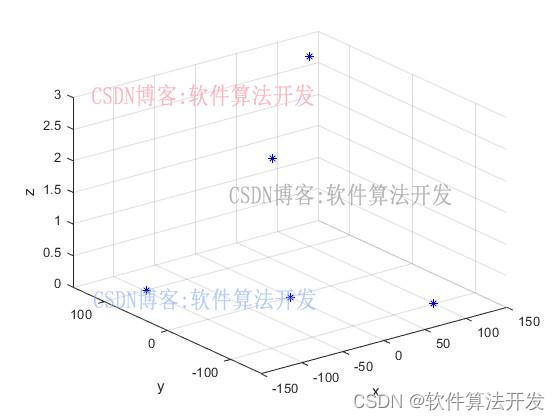
基于GA遗传算法的多机无源定位系统GDOP优化matlab仿真。仿真输出GDOP优化结果,遗传算法的优化收敛曲线以及三维空间坐标点。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行
3.核心程序
....................................................................% 开始迭代while gen < MAXGEN; genrng(gen);% 设置随机种子Pe0 = 0.999;% 交叉概率pe1 = 0.001; % 变异概率FitnV=ranking(Objv); % 适应度排序Selch=select('sus',Chrom,FitnV); % 筛选操作Selch=recombin('xovsp', Selch,Pe0); % 交叉操作Selch=mut( Selch,pe1); % 变异操作phen1=bs2rv(Selch,FieldD); % 解码操作% 计算新一代的目标值for a=1:1:NIND X1 = phen1(a,:);%计算对应的目标值[fobj,Vgdop]= func_obj(X1,target_pos);% 计算目标JJ(a,1) = fobj;% 存储目标值XYp{a} = X1; % 存储解Vp{a} = Vgdop;% 存储GDOPend Objvsel=(JJ); [Chrom,Objv]=reins(Chrom,Selch,1,1,Objv,Objvsel); gen=gen+1; Error(gen) = mean(JJ);end figure;plot(Error,'k','linewidth',2);grid onxlabel('迭代次数');ylabel('遗传算法优化过程');
JZ_pos
% 3D图显示
figure;
plot3(JZ_pos(1:end,1),JZ_pos(1:end,2),JZ_pos(1:end,3),'b*');
grid on
xlabel('x');
ylabel('y');
zlabel('z');
axis([-150,150,-150,150,0,3])
06_126m4.本算法原理
基于遗传算法(Genetic Algorithm, GA)的多机无源定位系统(Passive Localization with Multiple Platforms)中的几何 dilution of precision (GDOP) 优化是一种利用生物进化原理来搜索最优传感器配置或目标定位参数,以最小化定位误差的不确定性度量——GDOP的方法。GDOP综合考虑了位置、速度和时间测量误差对定位精度的影响,其值越小意味着定位精度越高。
首先,了解几个基本概念:
- 无源定位:无需向目标发射信号,仅依赖于目标反射或辐射的信号来确定目标位置。
- 多机系统:指多个观测平台协同工作,共同对一个或多个目标进行定位。
- GDOP:几何精度因子,衡量定位精度受测量误差影响的程度,定义为协方差矩阵的特征值乘积的平方根。
遗传算法是一种模拟自然选择和遗传机制的全局优化算法,主要包括三个核心步骤:选择、交叉和变异。
选择
选择操作基于每个个体(即一组传感器配置或参数)的适应度值(fitness value),通常与GDOP成反比。适应度越高,被选中参与繁殖的概率越大。选择过程可以通过轮盘赌选择、锦标赛选择等方式实现。
交叉
交叉操作模拟生物的有性生殖过程,从两个父代个体中交换部分基因以生成新的子代。在多机无源定位问题中,这可能意味着交换两个传感器配置方案的部分元素。
变异
变异是为了保持种群的多样性,随机改变个体的一个或多个基因值。在定位问题中,这可以体现为随机调整一个或多个传感器的位置或方向。
GDOP通常与定位系统的设计参数(如观测站布局)紧密相关,其表达式可由观测矩阵H的奇异值分解给出,其中H为各观测站到目标的几何关系矩阵。设H = USV^T,则GDOP可表示为最大奇异值与最小奇异值之比的平方:

在优化多机无源定位系统的GDOP时,首先需要定义染色体编码方式,例如,每个染色体可以编码为传感器的位置坐标。接下来,通过初始化一个随机生成的种群开始,每一代通过上述遗传操作产生新的种群,同时依据目标函数(即GDOP的倒数)评估每个个体的适应度。算法持续迭代,直到达到预设的停止条件,如最大迭代次数、适应度改善小于阈值或找到满意的GDOP值。
5.完整程序
VVV