【动态规划】| 路径问题之最小路径和 力扣64
🎗️ 主页:小夜时雨
🎗️专栏:动态规划
🎗️如何活着,是我找寻的方向

目录
- 1. 题目解析
- 2. 代码
1. 题目解析
题目链接: https://leetcode.cn/problems/minimum-path-sum/description/
这道题目和之前一道题 不同路径1力扣62: https://leetcode.cn/problems/unique-paths/description/ 有相似的地方, 建议先去看看那道题整理一下思路, 会简单一些.
通常动态规划的题目有五个大步骤进行解析, 接下来一一来进行分析.
1. 状态表示
动态规划的重点是状态表示, 我们通过状态表示才可以写出正确的状态转移方程, 状态表示我们通常都是根据 经验+题目 要求来进行定义的.
比如本道题又是一个二维的矩阵, 那么依旧可以定义我们的状态表示为
dp[i][j]: 表示到达 (i, j) 这个位置时, 路径上的数字总和为最小
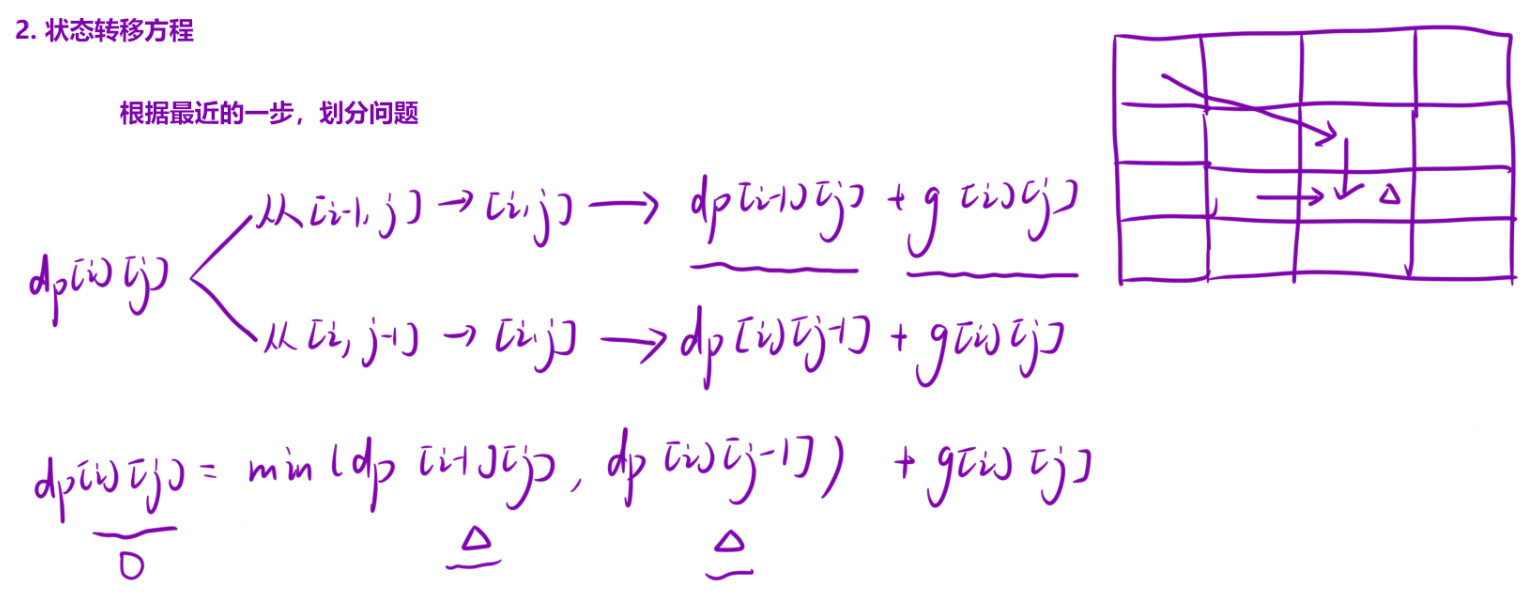
2. 状态转移方程
- 根据题目要求, 假如我们走到了 (i,j) 位置时, 我们可以从上面往下走或者是从左面往右走, 即是从 (i-1, j) 或者 (i, j-1) 往 (i, j) 的位置走。
- 根据状态表示, dp[i][j] 的大小可以由两部分组成, 问的是路径总和为最小, 那么共有两条不同的路径: 从左往右走或者从上往下走,求的应该是这二者中的最小值。
- 从 (0, 0) 走到 (i-1, j) 的最小路径总和假设为 X , 那么从 (0, 0) 走到 (i, j) 的最小路径总和就是 X + nums[i][j], 注意要加上 (i,j)位置的数字。
- 正好所对应的就是 dp[i - 1][j] 所表示的含义. 同理 dp[i][j - 1] 也是. 那么状态转移方程应如下表示:
dp[i][j] = Math.min(dp[i - 1][j],dp[i][j - 1]) + nums[i][j]
- 但是有一个细节问题, 这里和不同路径1 不同的是, 这里需要用到原数组,我们通常也是采取多加一行一列的方式来避免出现 dp 表越界的情况, 所以要注意映射关系。
- 即是遍历 dp 表填表的过程中的 (i, j)对应原数组的值是 nums[i- 1][j - 1] 要注意,后面还会再强调一遍。
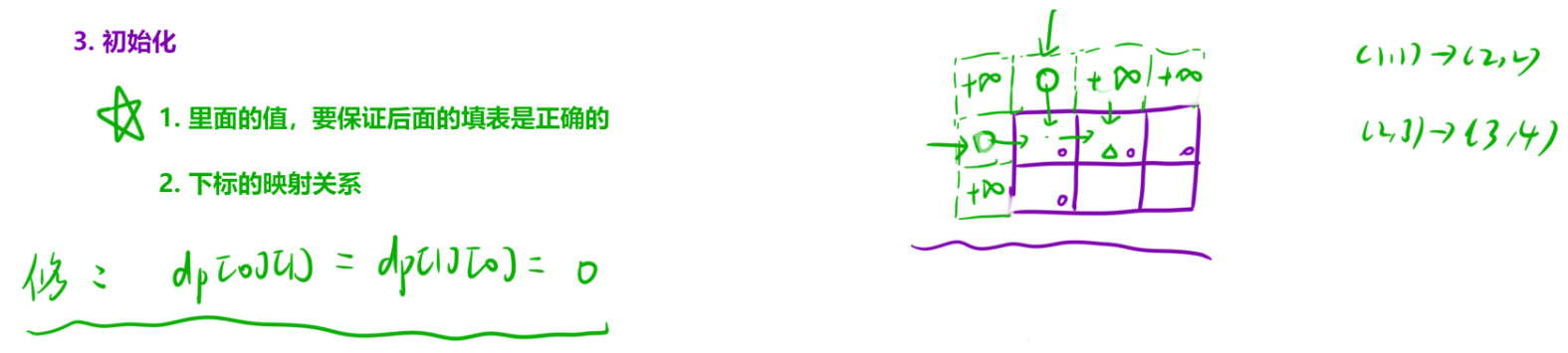
3. 初始化
细节问题: 观察状态转移方程可知, 有可能会有越界的风险, 此处我们依旧采取一种多加一行一列的方式来进行初始化.多加一行一列要保证两点:
- 虚拟节点的值要保证后面的dp 表里的值是正确的
- 要注意下标的映射关系. 因为我们是多加了一行一列, 所以对应到原始数组就应该行列要减一. (此处用到了原数组, 所以要有这个映射关系)
注意 :
这道题的初始化和前两道题有些许不同
- 原本的dp[0][0] 最小的路径和就是本身自己, 也就是 dp[0][0] = nums[0][0]. 因为我们多加了一行一列, 所以变成了 dp[1][1] = nums[0][0].
- 观察下图我们发现,填写 dp[1][1] 的时候需要用到左边和上边值, 因为求的是二者中的最小值, 为了不干扰结果, 设置为0即可。
- 看下图,但是填写 dp[1][2] 的时候,需要用到上面的值 dp[0][2] 和 dp[1][1] 作比较求最小值,倘如是dp[1][2] 还是默认初始化为 0 的话, 就会影响结果,使dp[1][2] = dp[0][2] + nums[0][1], 导致错误了.
- dp[1][2] 本该是只有一条路径, 那就是用到 (1,1)走到(1,2),就应该是 dp[1][2] = dp[1][1] + nums[0][1]. 观察结果,让 dp[0][2] 是一个非常大的数字,不影响结果即可。此处通常我们设置为整数最大值或者 0x3f3f3f3f.
看图更容易理解
4. 填表顺序
观察可知, 填 (i, j) 的值的时候需要用到上一行和左边的值. 所以填表顺序是 从上往下, 从左往右.
5. 返回值
根据题目的要求, 要到达(m, n) 最小路径和是多少, 正好对应 dp[m][n] 的表示. 所以返回 dp[m][n] 即可.
2. 代码
动态规划的代码编写一般都是分为 4 个步骤进行:
- 创建 dp 表
- 初始化
- 填表
- 返回值
// 动态规划// 是不同路径1 的小幅改动版版: https://leetcode.cn/problems/unique-paths/public int uniquePathsWithObstacles(int[][] ob) {// 1.创建 dp表// 2.初始化// 3.填表// 4.返回值// 动态规划 这里的是二维, 所以时空都是O(M*N)int m = ob.length, n = ob[0].length;int[][] dp = new int[m + 1][n + 1];// dp[1][1] = 1;dp[0][1] = 1;// 做好映射关系, 原数组的(0,0) 对应dp表中的(1,1)// 这里填的是 dp 表, 所以建议从(1,1) 开始, 也就是dp表多加了一行一列// 如果是障碍的话, 就直接忽略, 默认就是 0, 也就是表示到不了for(int i = 1; i <= m; i++) { // 从上往下每一行for(int j = 1; j <= n; j++) { // 从左往右每一列if(ob[i - 1][j - 1] == 0) {dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}}return dp[m][n];}
🎗️🎗️🎗️ 好啦,到这里有关本题的分享就没了,如果感觉做的还不错的话可以点个赞,关注一下,你的支持就是我继续下去的动力,我们下期再见,拜了个拜~ ☆*: .。. o(≧▽≦)o .。.:*☆