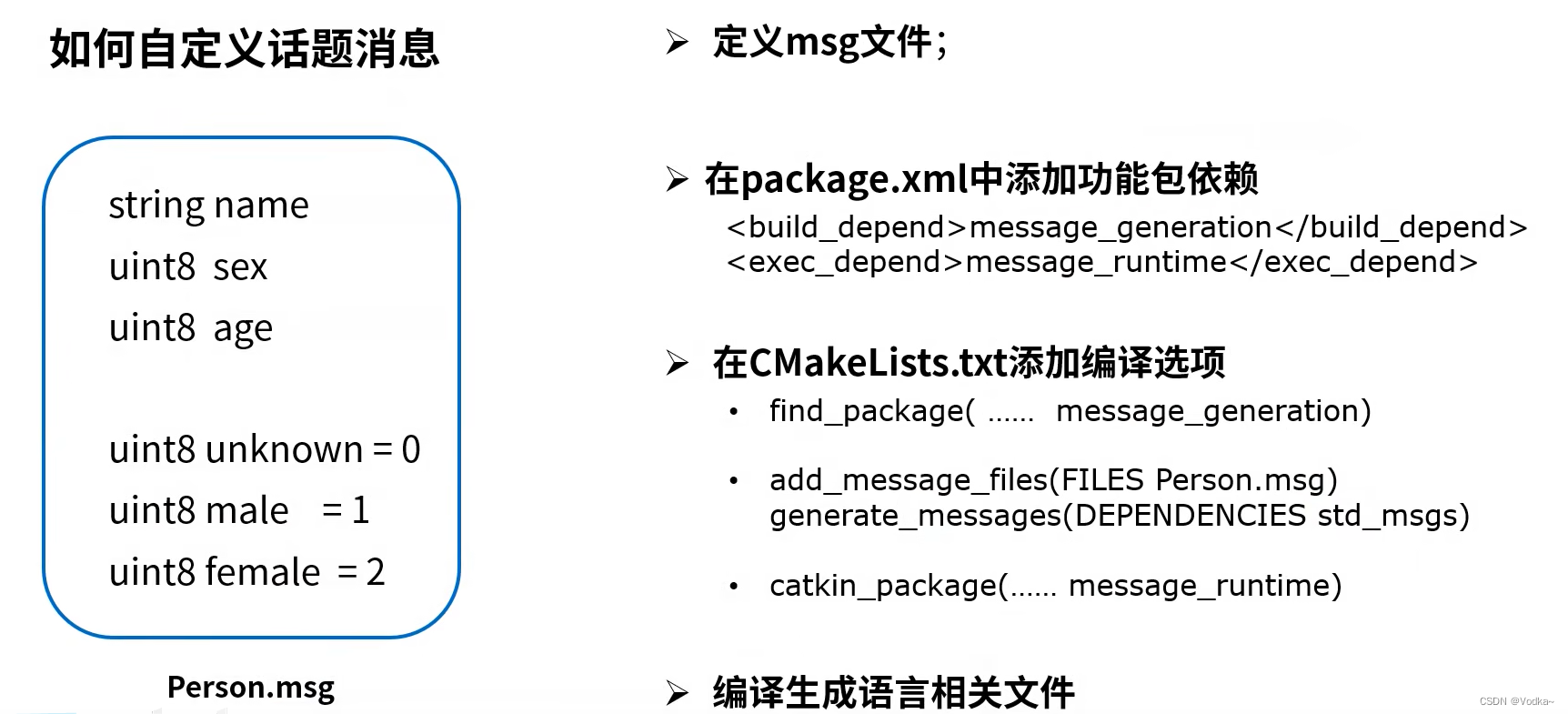
定义Person话题
定义Person发布者
#include <ros/ros.h>
#include <test_topic/Person.h>
int main(int argc, char **argv)
{ros::init(argc, argv, "person_publisher");ros::NodeHandle n;ros::Publisher person_info_pub = n.advertise<test_topic::Person>("/person_info", 10);ros::Rate loop_rate(1);int count = 0;while (ros::ok()){test_topic::Person person_msg;person_msg.name = "vodka";person_msg.age = 22;person_msg.gender = test_topic::Person::male;person_info_pub.publish(person_msg); ROS_INFO("Publish Person Info, name:%s\n age:%d\n gender:%d ",person_msg.name.c_str(),person_msg.age,person_msg.gender); loop_rate.sleep();}return 0;
}
定义订阅者
#include <ros/ros.h>
#include "test_topic/Person.h"
void PersonInfoCallback(const test_topic::Person::ConstPtr& msg){ROS_INFO("Subscribe Person Info: name:%s\n age:%d\n gender:%d",msg->name.c_str(),msg->age,msg->gender);
}int main(int argc , char **argv){ros::init(argc,argv,"person_subscriber");ros::NodeHandle n;ros::Subscriber person_info_sub = n.subscribe("/person_info",10,PersonInfoCallback);ros::spin();return 0;
}
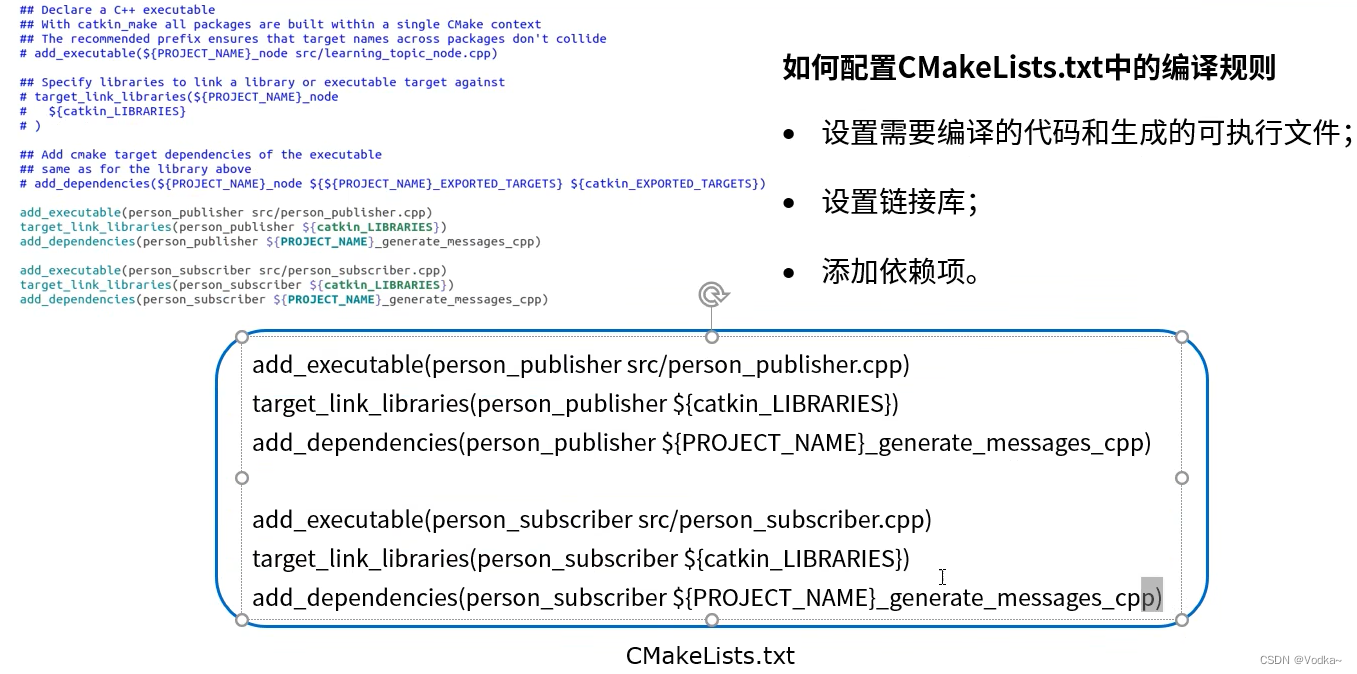
添加相关依赖(generate_messages:某些代码功能需要动态生成,添加依赖信息)
person_publisher 和 person_subscriber 通过节点管理器建立了ROStcp之后,节点管理器关闭也不会影响两者正常运行