STM32定时器输出pwm的几种模式
目录
定时器
输出脉冲模式:
PWM模式(PWM Mode)
输出比较模式(Output Compare Mode)
总结
占空比:
输出比较模式与占空比
PWM模式与占空比
输出比较模式与PWM模式的结合
输出比较模式实例:
问题记录:
参考:
定时器
定时器分类:
高级定时器
通用定时器
基本定时器
三种定时器都可以输出pwm,但是常用高级和通用定时器,功能更多。
输出脉冲模式:
常用的四种输出脉冲模式:
1.定时器中断里面设定电平高低进行脉冲输出,简单的翻转。
2.PWM1
3.PWM2
4.输出比较模式(也是一种翻转)
第一种很少用。
pwm1和pwm2的区别还没有搞懂。
PWM模式(PWM Mode)
PWM模式是定时器模块的一种重要功能,用于生成周期性变化的脉冲信号。STM32的定时器模块通常支持两种PWM模式:PWM1和PWM2。
- PWM1模式:在PWM周期内,当定时器的计数值小于比较值时,输出为高电平;当计数值大于比较值时,输出为低电平。
- PWM2模式:与PWM1相反,在PWM周期内,当定时器的计数值小于比较值时,输出为低电平;当计数值大于比较值时,输出为高电平。
优点:
- 高效生成连续波形:硬件生成周期性PWM信号,不需要CPU干预,适用于需要连续波形输出的场景。
- 灵活控制占空比:通过改变比较值可以灵活控制PWM信号的占空比,适用于调光、调速等应用。
- 多用途:广泛应用于电机控制、LED调光、音频信号生成等领域。
缺点:
- 配置相对复杂:需要正确设置定时器的频率、周期和比较值,初次使用可能需要花时间理解。
- 频率和分辨率限制:PWM信号的频率和分辨率受限于定时器的硬件规格和时钟源,可能无法满足所有应用需求。
用途: PWM广泛用于电机控制、模拟信号生成、电源管理等领域,需要精确控制输出功率或电压
输出比较模式(Output Compare Mode)
输出比较模式是STM32定时器的一种功能,可以用来生成精确的时间事件。当定时器计数器的值与预设的比较值匹配时,定时器可以输出一个信号,改变输出引脚的状态(例如设为高电平、低电平或翻转)。STM32定时器的输出比较模式通常包括:
- 冻结(Frozen)模式
- 主动电平设置(Set Active Level on Match)
- 电平复位(Set Inactive Level on Match)
- 翻转(Toggle)模式
- 强制高电平(Force Active Level)
- 强制低电平(Force Inactive Level)
优点:
- 精确控制:可以精确控制输出引脚的状态变化时刻,适用于时间敏感的应用。
- 多种模式:提供多种输出模式,灵活应对不同的应用需求。
- 低CPU开销:通过硬件实现,不占用CPU资源,适合实时性要求高的应用。
缺点:
- 配置复杂:需要理解并正确配置定时器和相关寄存器。
- 功能局限:主要用于生成单次或周期性的事件,对连续波形生成支持不如PWM。
总结
在STM32的定时器模块中,输出比较模式和PWM模式各有其特定的应用场景和优缺点。
输出比较模式适用于需要精确控制输出引脚状态变化时刻的应用,如生成定时事件、测量时间间隔等。
PWM模式适用于需要生成连续周期性波形的应用,如电机控制、LED调光、音频信号生成等。
如果需要精确控制单次或周期性的时间事件,选择输出比较模式。
如果需要生成连续的PWM信号,并灵活控制占空比,选择PWM模式(PWM1或PWM2)。
占空比:
在STM32的定时器模块中,输出比较模式和PWM模式是紧密相关的,尤其在PWM模式下,占空比的控制是核心功能。然而,严格来说,标准的输出比较模式本身并不是为控制占空比设计的。让我们深入探讨这个问题。
输出比较模式与占空比
输出比较模式本质上是通过比较定时器的计数值和预设的比较值(CCRx寄存器)来触发特定的行为,例如改变输出引脚状态。例如上文中的6种模式,尽管这些模式中部分可以改变输出引脚的状态,但它们并不是专门设计来控制占空比的。而占空比控制是PWM模式的核心功能。
PWM模式与占空比
PWM模式专门设计用于生成占空比可调的周期性信号。在PWM模式下,定时器的计数值在一个周期内连续计数(从0到预设的ARR值)。通过设置比较值(CCRx),可以定义在一个周期内高电平和低电平的时间,从而实现占空比的控制。
配置方法
- 设置周期:通过设置自动重装载寄存器(ARR)的值确定PWM信号的周期。
- 设置占空比:通过设置捕获/比较寄存器(CCRx)的值确定PWM信号的占空比。
例如,在PWM1模式下,当计数器值小于CCRx时,输出为高电平;当计数器值大于CCRx时,输出为低电平。这样,通过调整CCRx的值可以灵活控制占空比。
输出比较模式与PWM模式的结合
在一些特定的应用场景中,可以利用输出比较模式和PWM模式的结合来实现更复杂的占空比控制。例如,通过配置多个输出比较通道,可以在一个周期内多次改变输出引脚的状态,从而实现非标准的PWM信号。
结论
- 输出比较模式:主要用于生成精确的定时事件或单次/周期性引脚状态变化,不适合直接控制占空比。
- PWM模式:专门用于生成占空比可调的周期性信号,适合控制电机速度、LED亮度等。
如果您的应用需要控制占空比,建议使用PWM模式(PWM1或PWM2)。输出比较模式适合用于需要精确时序控制的其他场合,但不适合用于生成占空比可调的信号。
输出比较模式实例:
//输出引脚配置
static void PWM_TIM_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(MOTOR_PUL_GPIO_CLK, ENABLE);GPIO_InitStructure.GPIO_Pin = MOTOR_PUL_PIN;// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;//GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(MOTOR_PUL_GPIO_PORT, &GPIO_InitStructure);}//中断配置
static void PWM_TIM_NVIC_Config(void)
{NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); NVIC_InitStructure.NVIC_IRQChannel = PWM_TIM_CC_IRQn ; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);
} //对定时器配置成输出比较
void PWM_TIM_Mode_Config(void)
{ TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; //时间基 结构体变量TIM_OCInitTypeDef TIM_OCInitStruct; //通道初始化 结构体变量 PWM_TIM_APBxClockCmd(PWM_TIM_CLK,ENABLE); //使能TIM1定时器时钟线//时间基设定参数TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //这里跟TIM1 产生PWM波功能无关TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计时模式//不知道为什么这里要设成65535才行,不是说比较输出模式和TIM_Period没关系吗TIM_TimeBaseInitStruct.TIM_Period = 0XFFFF - 1; //0xFFFF - 1 TIM_TimeBaseInitStruct.TIM_Prescaler = PWM_TIM_Prescaler; //最高频率72MHZ 这里定义 预分频720 TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(PWM_TIM,&TIM_TimeBaseInitStruct);//初始化函数 让刚刚配置的参数 输入到对应寄存器里面//pwm输出模式设定参数TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_Toggle; //比较输出模式TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;//输出极性低TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; //CER的CC1N,输入/捕获输出使能TIM_OCInitStruct.TIM_Pulse = 0; //初始化占空比0 占空比可以依照TIM_Period进行配置 在它范围内就好了TIM_OC4Init(PWM_TIM,&TIM_OCInitStruct); //初始化函数 让刚刚配置的参数 输入到对应寄存器里面TIM_ITConfig(PWM_TIM, PWM_TIM_IT_CC, ENABLE);//使能通道4中断 TIM_OC4PreloadConfig(PWM_TIM,TIM_OCPreload_Disable);//输出比较时,要禁能 //TIM_ARRPreloadConfig(TIM1,ENABLE);//没搞懂影响TIM_ClearITPendingBit(PWM_TIM, TIM_IT_CC4 ); //清除中断标志//TIM_SetCompare4(TIM1, temp_data_06); //放在这里会影响第一个脉冲的宽度,不对}TIM_OC4PreloadConfig(PWM_TIM,TIM_OCPreload_Disable);//输出比较时,要禁能,因为禁能时,可以随时更改ccr的值;使能时,只有计数到arr的设定值时,才可以修改ccr的值,这样可以让脉冲更稳定,
//中断处理部分
void PWM_TIM_IRQHandler(void)
{ if(TIM_GetITStatus(PWM_TIM, TIM_IT_CC4) != RESET){// 清楚定时器中断TIM_ClearITPendingBit(PWM_TIM, TIM_IT_CC4 );//不知道放在中断开头还是结尾好 capture = TIM_GetCapture4(PWM_TIM);//一定要先读取计数值,TIM_SetCompare4(PWM_TIM, capture + temp_data_06);//在计数值基础上加上时间,等待计数值到达这个数}
}一定要先读取计数值,想加后,再使用TIM_SetCompare4设定比较值
//初始化pwm用到的定时器,脉冲引脚
void motor_pwm_Init(void)
{PWM_TIM_NVIC_Config();PWM_TIM_GPIO_Config(); PWM_TIM_Mode_Config();
}//使用的时候,进行使能和禁能即可输出和关闭脉冲
TIM_Cmd(PWM_TIM,ENABLE); //使能计时器
TIM_CtrlPWMOutputs(PWM_TIM,ENABLE); //输出脉冲使能设成0,定时器会被关闭,不输出脉冲。
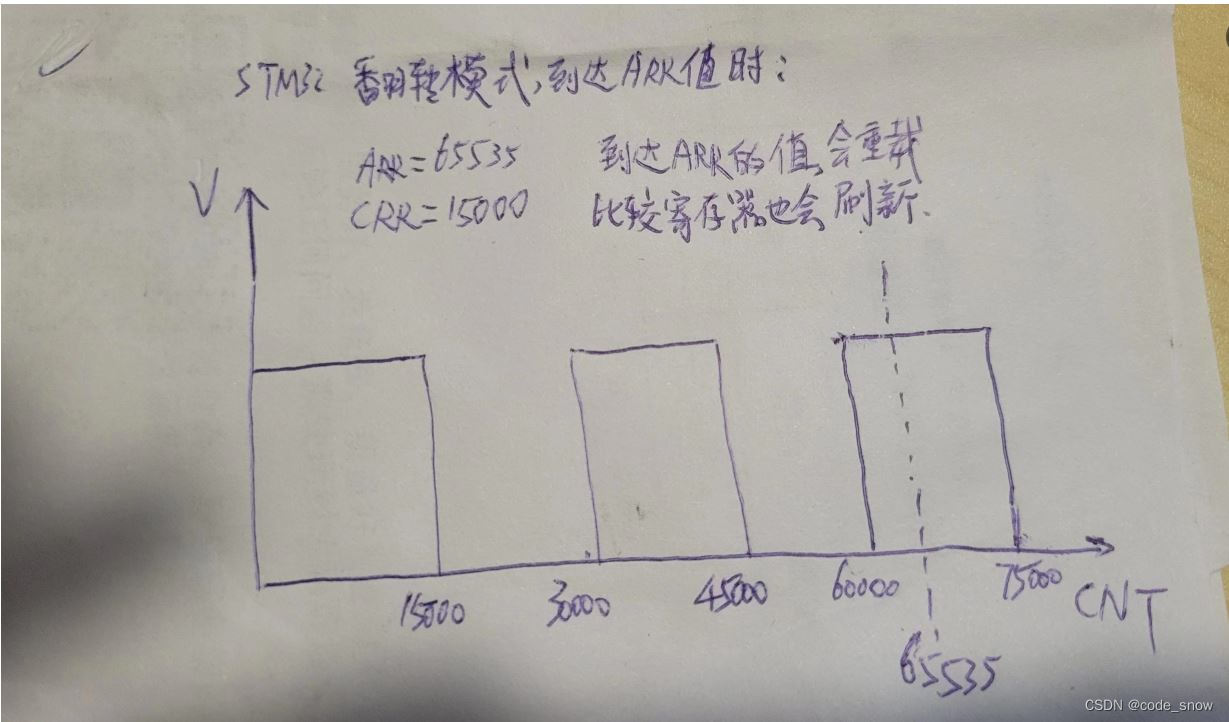
关于到达TIM_Period设定值,会如何处理:
1. 只有对TIM_IT_Update中断使能,到达arr的值才会进入中断,因此在时候不会进入中断
2.会触发一个事件,然后对相关寄存器进行刷新,相关计数值也会刷新,因此ccr和tim->cnt的比较咩有影响。具体过程如下图
问题记录:
设置的是200us的宽度,不知道为什么第一个宽度会是400,
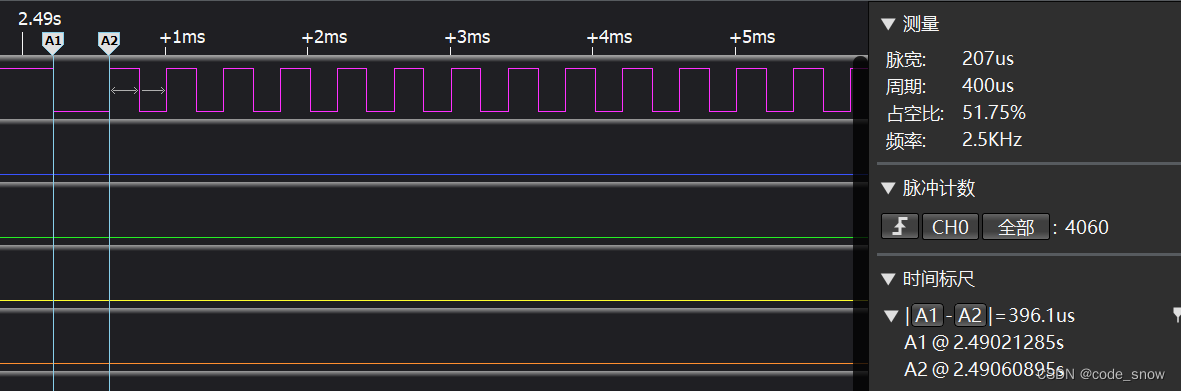
arr设置的是65535-1,不知道为什么,每次初始化完,在第一个脉冲前都会出现这么一段,把arr的值设小了,这一段也会变短。

参考:
STM32定时器之ARR,PSC俩兄弟
【经验分享】STM32实例-步进电机的速度控制 - STM32团队 ST意法半导体中文论坛
STM32 定时器输出比较翻转模式_stm32f4定时器输出比较翻转模式驱动代码-CSDN博客