当前位置: 首页 > news >正文 OpenCV 双目相机标定 news 2025/8/23 15:44:04 文章目录 一、简介1.1单目相机标定1.2双目相机标定 二、实现代码三、实现效果参考资料 一、简介 1.1单目相机标定 与单目相机标定类似,双目标定的目的也是要找到从世界坐标转换为图像坐标所用到的投影P矩阵各个系数(即相机的内参与外参)。具体过程如下所述: 1、首先我们需要获取一个已知图形的图像(这里我们使用MATLAB所提供的数据)。 2、找到同名像点(匹配点),这里主要是探测黑白格子之间的角点。 3、构建方程。 展开这个等式就可以表示为: 查看全文 http://www.lryc.cn/news/370195.html 相关文章: WPF/C#:异常处理 2024年跨平台应用解决方法 人工智能ChatGPT的多种应用:提示词工程 OceanBase v4.2 解读:tenant=all 语义优化,提升易用性 理论和实验 Linux 常用命令 - userdel 【删除用户】 等保测评和安全运维 Java课程设计:基于Java+Swing+MySQL的图书管理系统(内附源码) WireGuard网络架构及配置详解 VB.NET实现上位机自动识别可用串口 Node.js版本管理工具-NVM 【react】useEffect 快速上手 docker容器部署jenkins 第十四章 享元模式 ThinkBook 16 2024 Ubuntu 触控板问题解决 qt qDebug兼容LOGE 【Ardiuno】实验使用ESP32单片机连接Wifi(图文) 常用的五大数据可视化工具测评分享 什么是校园抄表系统? 计算机专业:未来何去何从? python-windows10普通笔记本跑bert mrpc数据样例0.1.048 4句话明白虚拟机和容器的区别 Django render()函数页面渲染 基于webrtc的媒体流传输工具tl-rtc-file 【最新鸿蒙应用开发】——类Web开发范式2——前端语法 前端的强缓存和协商缓存 JSON如何处理包含特殊字符的字段 JavaScript 中的 AbortController 【前端】vue在线编辑器 leetcode67:二进制求和
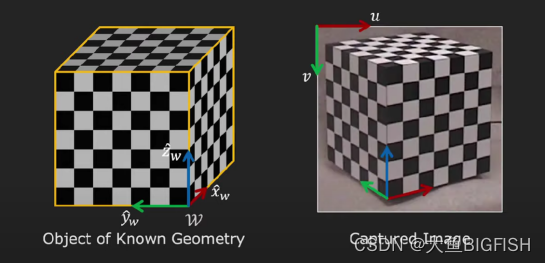
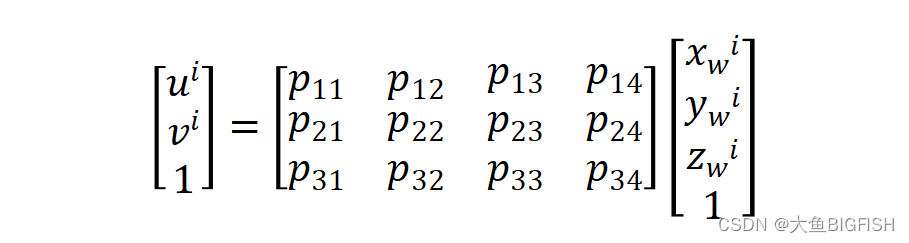
文章目录 一、简介1.1单目相机标定1.2双目相机标定 二、实现代码三、实现效果参考资料 一、简介 1.1单目相机标定 与单目相机标定类似,双目标定的目的也是要找到从世界坐标转换为图像坐标所用到的投影P矩阵各个系数(即相机的内参与外参)。具体过程如下所述: 1、首先我们需要获取一个已知图形的图像(这里我们使用MATLAB所提供的数据)。 2、找到同名像点(匹配点),这里主要是探测黑白格子之间的角点。 3、构建方程。 展开这个等式就可以表示为: 查看全文 http://www.lryc.cn/news/370195.html 相关文章: WPF/C#:异常处理 2024年跨平台应用解决方法 人工智能ChatGPT的多种应用:提示词工程 OceanBase v4.2 解读:tenant=all 语义优化,提升易用性 理论和实验 Linux 常用命令 - userdel 【删除用户】 等保测评和安全运维 Java课程设计:基于Java+Swing+MySQL的图书管理系统(内附源码) WireGuard网络架构及配置详解 VB.NET实现上位机自动识别可用串口 Node.js版本管理工具-NVM 【react】useEffect 快速上手 docker容器部署jenkins 第十四章 享元模式 ThinkBook 16 2024 Ubuntu 触控板问题解决 qt qDebug兼容LOGE 【Ardiuno】实验使用ESP32单片机连接Wifi(图文) 常用的五大数据可视化工具测评分享 什么是校园抄表系统? 计算机专业:未来何去何从? python-windows10普通笔记本跑bert mrpc数据样例0.1.048 4句话明白虚拟机和容器的区别 Django render()函数页面渲染 基于webrtc的媒体流传输工具tl-rtc-file 【最新鸿蒙应用开发】——类Web开发范式2——前端语法 前端的强缓存和协商缓存 JSON如何处理包含特殊字符的字段 JavaScript 中的 AbortController 【前端】vue在线编辑器 leetcode67:二进制求和