经典文献阅读之--Online Monocular Lane Mapping(使用Catmull-Rom样条曲线完成在线单目车道建图)
0. 简介
对于单目摄像头完成SLAM建图这类操作,对于自动驾驶行业非常重要,《Online Monocular Lane Mapping Using Catmull-Rom Spline》介绍了一种仅依靠单个摄像头和里程计生成基于样条的在线单目车道建图方法。我们提出的技术将车道关联过程建模为一个二分图的分配问题,并通过结合Chamfer距离、姿态不确定性和横向序列一致性为边赋予权重。此外,文中还精心设计了控制点初始化、样条参数化和优化,以逐步创建、扩展和精化样条。相关的代码已经在Github上开源了。
1. 主要贡献
基于Catmull-Rom样条表示,设计了一个完整的在线车道建图系统,如图1所示。所提出的系统允许自动驾驶车辆使用时间图像和里程计数据实时构建局部车道地图,这可以用于自我定位、规划和众包更新[4]。总体而言,具体贡献可以总结如下:
- 我们提出了一个在线单目车道映射系统,包括车道跟踪和地图优化子系统。该系统可以直接输出由Catmull-Rom样条表示的轻量级实例级车道地图,无需离线矢量化。
- 系统的每个部分都经过精心设计,结合了车道标线和样条的特性,包括车道关联、姿态估计、样条初始化、扩展和优化。
- 在公开可用的数据集OpenLane上的实验表明,我们提出的方法可以改善车道关联、里程计精度和地图质量。
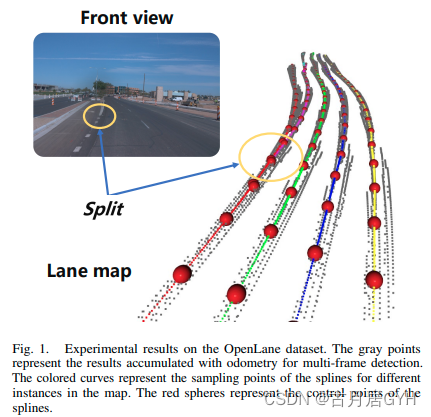
图1. 在OpenLane数据集上的实验结果。灰色点表示使用里程计进行多帧检测的累积结果。彩色曲线表示地图中不同实例的样本点的样条曲线。红色球体表示样条曲线的控制点。
2. 系统概述
所提出的单目车道映射系统的结构如图2所示。该系统使用仅有的单目摄像头和里程计(例如VIO、LIO)作为输入,无需先验导航地图或航空照片,即可输出紧凑的车道标记地图,以样条表示。具体而言,所提出的框架由两个子系统组成:车道跟踪和地图优化。神经网络在车道跟踪中直接基于输入图像预测3D车道标记。然后,这些预测结果经过进一步处理以满足后续需求,详见第3.1节。随后,处理后的车道标记与地图中的车道标记结合,同时考虑里程计提供的位姿信息(第3.2节)。最后,根据关联结果更新位姿(参见第3.3节)。在地图优化中,样条首先从零开始初始化,或者根据新获得的检测结果进行扩展(第4.1节)。最后,应用增量优化框架iSAM2 [28],通过添加新的观测来逐步更新地图中的样条,而不会丢失过去观测的信息(第4.2节)。
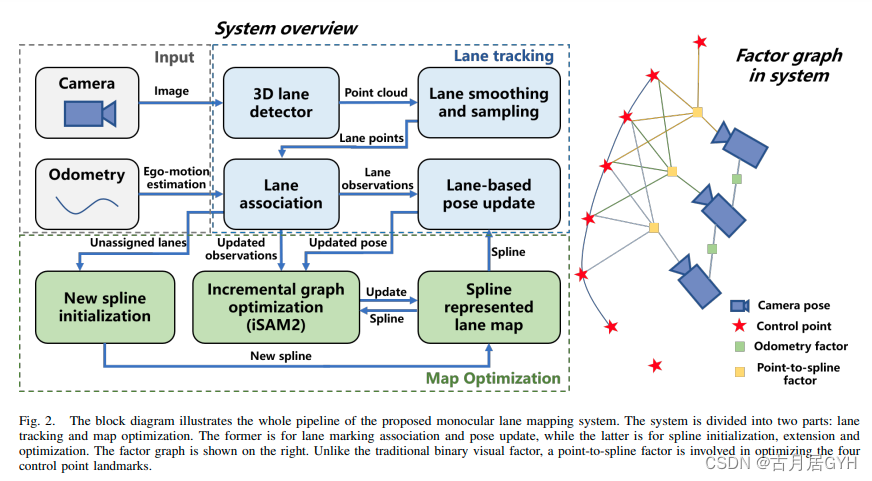
图2. 该块图示了提出的单目车道映射系统的整个流程。该系统分为两个部分:车道跟踪和地图优化。前者用于车道标记关联和姿态更新,而后者用于样条曲线的初始化、扩展和优化。右侧显示了因子图。与传统的二进制视觉因子不同,优化过程中涉及到了点到样条曲线的因子,用于优化四个控制点地标。
3. 车道跟踪
3.1 车道表示
在这项研究中,我们使用Persformer [12]来获得车道检测结果,其中包括无序的车道标记点及其相关的实例级标签。此外,我们区分车道的表示方式,包括观测(检测)和地标(地图)。特别地,对于网络预测结果,考虑到其稀疏性和噪声,我们首先将其转换为本地参考框架(LRF),其中车道的主要方向与X轴对齐。随后,我们对X-Y和X-Z坐标进行三次多项式拟合,并以特定分辨率进行采样(在我们的实验中设定为0.5米)。因此,车道观测结果可以表示为:
点击经典文献阅读之--Online Monocular Lane Mapping(使用Catmull-Rom样条曲线完成在线单目车道建图) - 古月居
可查看全文