地面站Mission planner
官方教程;
Mission Planner地面站介绍 | Autopilot (gitbook.io)
Mission Planner 功能/屏幕 — Mission Planner 文档 (ardupilot.org)
安卓或者windows软件下载地址:
地面站连接及使用 · plane (cuav.net)
在完全装机后再进行各干器件的校准,没有组装完成就直接校准是没有意义的。调试的时候不要装桨叶和不要接电池。
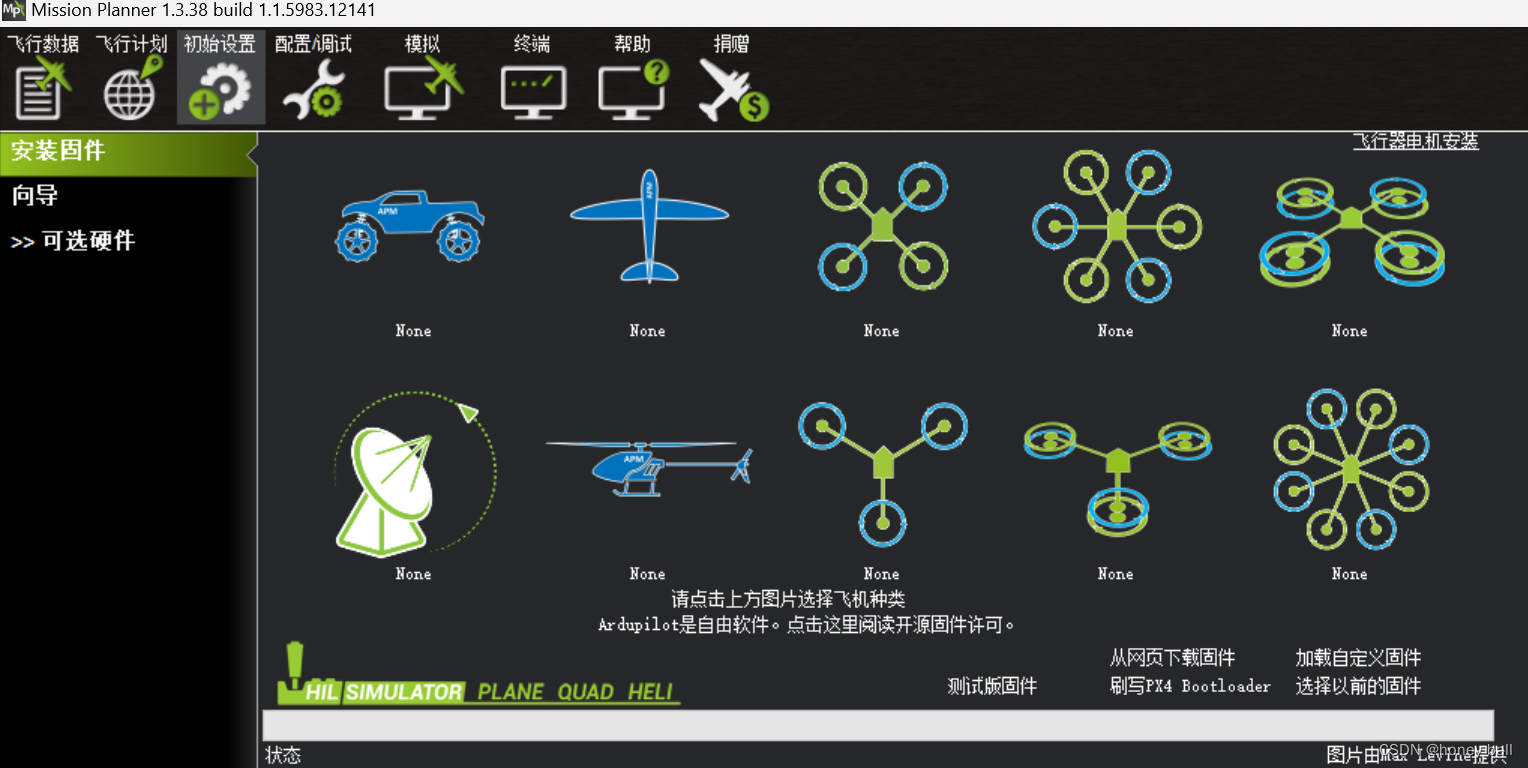
一般不用在线刷写固件,都是从官方下载HEX文件的固件,点击地面站的右下角“加载自定义固件”进行固件的下载:
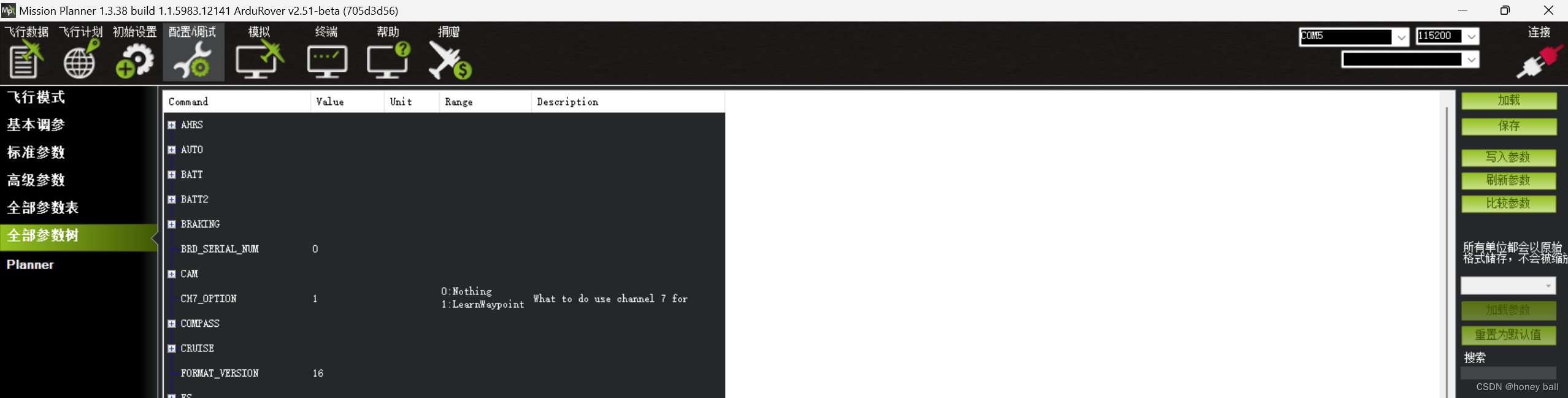
调试飞控前点击重置为默认值:
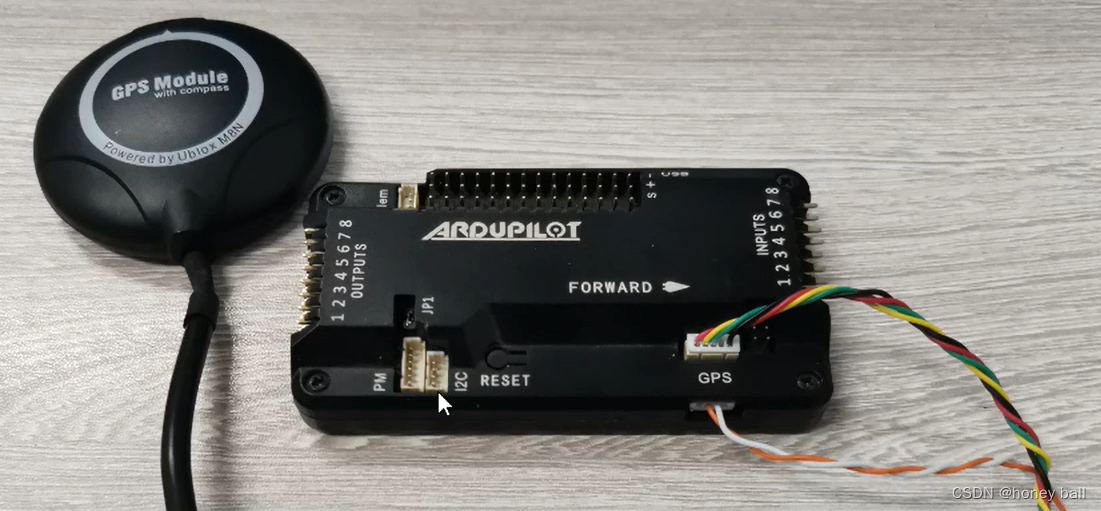
之后依次校准各个部件;将GPS的输出接上飞控的对应的GPS MODULE口,打开地面站,USB连接飞控,选择“连接”,连接成功后进入“初始设置”页面,展开左侧“必要硬件”,准备校准。
http://【无人机组装与调试 - F450、F550无人机硬件组装至飞控调参详细教程合集】https://www.bilibili.com/video/BV14M4y1C7Cb?p=4&vd_source=3cc3c07b09206097d0d8b0aefdf07958
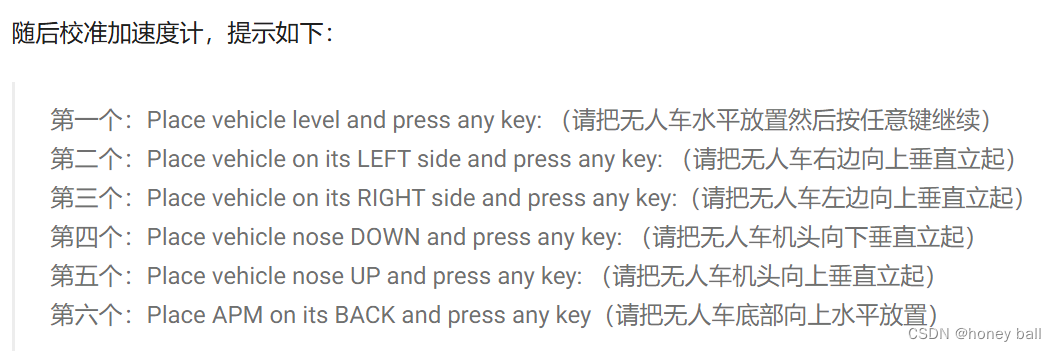
加速度计校准: