正点原子[第二期]Linux之ARM(MX6U)裸机篇学习笔记-24.5,6 SPI驱动实验-ICM20608 ADC采样值
前言:
本文是根据哔哩哔哩网站上“正点原子[第二期]Linux之ARM(MX6U)裸机篇”视频的学习笔记,在这里会记录下正点原子 I.MX6ULL 开发板的配套视频教程所作的实验和学习笔记内容。本文大量引用了正点原子教学视频和链接中的内容。
引用:
正点原子IMX6U仓库 (GuangzhouXingyi) - Gitee.com
《【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.5.2.pdf》
正点原子资料下载中心 — 正点原子资料下载中心 1.0.0 文档
SPI学习参考资料:
简述SPI通信协议-01_cpha选择为第一个边沿-CSDN博客
SPI中的CPHA,CPOL详解-CSDN博客
一文搞懂SPI通信协议_spi协议-CSDN博客
摩托罗拉 《SPI Block Guide V03.06》 手册
链接:https://pan.baidu.com/s/1_mvR5AD0-OBI2bYyx2i4Sw?pwd=f4bo
提取码:f4bo
正文:
本文是 “正点原子[第二期]Linux之ARM(MX6U)裸机篇--第24讲 SPI驱动。本节将参考正点原子的视频教程第24讲和配套的正点原子开发指南文档进行学习。
0. 概述
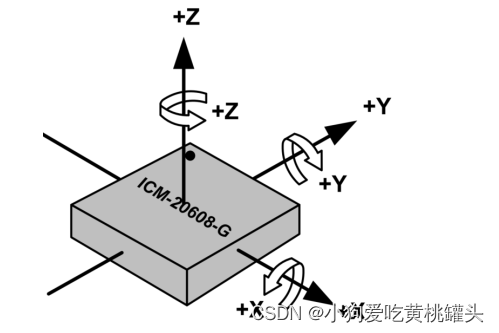
通I2C一样,SPI是很常用的通信接口,也可以通过SPI来连接众多的传感器。相比I2C接口,SPI接口的通信速度很快,I2C最多400KHz,但是SPI可以到达即使MHz。I.MX6U 也有4个SPI接口,可以通过这4个SPI接口来连接一些SPI外设。I.MX6U-ALHPA使用SPI3接口连接了一个6周传感器 ICM-20608,本章我们就来学习如何使用I.MX6U的SPI接口来驱动ICM-20608,读取ICM-20608的六轴数据。
1. ICM20608 6轴传感器量程
icm20608 6轴传感器,支持陀螺仪x,y,z三轴的角速度测量和加速度计x,y,z三轴的加速度计测量。icm20608 陀螺仪的量程范围可选配置为±250,±500,±1000和±2000 °/s,角速度计的量程范围可选配置为±2g,±4g,±8g和±16g。icm20608 x,y,z 轴的输出是一个 16位的 ADC 采样值,16位值的表示范围为 0 ~ 65535,那么采样值和量程范围的关系是什么哪?
参考链接:
IMX6ULL裸机篇之SPI实验-ICM20608传感器_icm20608数据手册-CSDN博客
- 陀螺仪量程
如果陀螺仪所设置的分辨率范围为 ±250,即 -250~+250,也就是 500°/s。
ADC数据的位数为 16位,即 0~65535,也就是 65536。那么一度对应多大的数据呢?
65536/500 = 131.07
举例说明:
如果所设置的分辨率范围为 ±250,读取到的 ADC值是 1000,那么陀螺仪的角速度是多少?
当前陀螺仪的角速度为:
1000 / 131 = 7.6°/s
- 加速度计量程
加速度计计算公式与陀螺仪相似。
举例说明:
如果加速度计设置的分辨率范围为 ±2,即 -2~+2,也就是 4。
ADC值的位数为 16位,即 0~65535,也就是 65536。一度则对应多大的 ADC值呢?
65536/4 = 16384
如果此时读取到的 ADC值为 16384,则这时的加速度计的加速度是多少?
16384 / 16384 = 1g