ABB 控制柜

1,主计算机:相当于电脑的主机,用于存放系统和数据,需要24V直流电才能工作。执行用户编写的程序,控制机器人进行响应的动作。主计算机有很多接口,比如与编程PC连接的服务网口、用于连接示教器的网口、连接轴计算机板的接口、连接安全面板的接口、不同的现场总线卡接口(比如PRROFIBUS、PROFNET、DeviveNet等)、安全板接口及其它可选接口等。

2,轴计算机板
主计算机发出控制指令后,首先给轴轴计算机板,轴计算机处理后在传递给驱动单元,同时轴计算机板还处理串口测量板SMB传递的分解器信号,接收机器人轴串行测量板(SMB)返回的位置数据,与先前的位置数据进行比较和运算,并输出新的位置和速度控制参数

3,6轴驱动单元
驱动单元将变压器提供的交流电整流成直流电,在将直流电逆变成交流电,驱动电动机

4,串口测量SMB板和电池 电池在控制柜断电的情况下可以保持相关数据,具有断电保持功能,串口测量板可以保存电动机分解器的位置信息进行处理保存

5,系统电源模块
可以将220V交流电转换成24V直流电 ,给主机算计和示教器提供电源输出

6,电源分配板块
可以将系统电源的24V电源分配给各个组件

7, 电容器
充电和放电是电容器的基本功能。 此电容用于机器人关闭电源后,保存数据后再断电,相当于延时断电功能。

8,接触器板
K42 K43 给驱动取提供三项交流电源 K44 给电动机抱闸提供24V电源

9,安全板
用来连接一些安全相关的信号,在正常工作时,其LED灯应全部点亮,安全板控制总停(GS1,GS2),自动停(AS1,AS2),优先停(SS1,SS2)

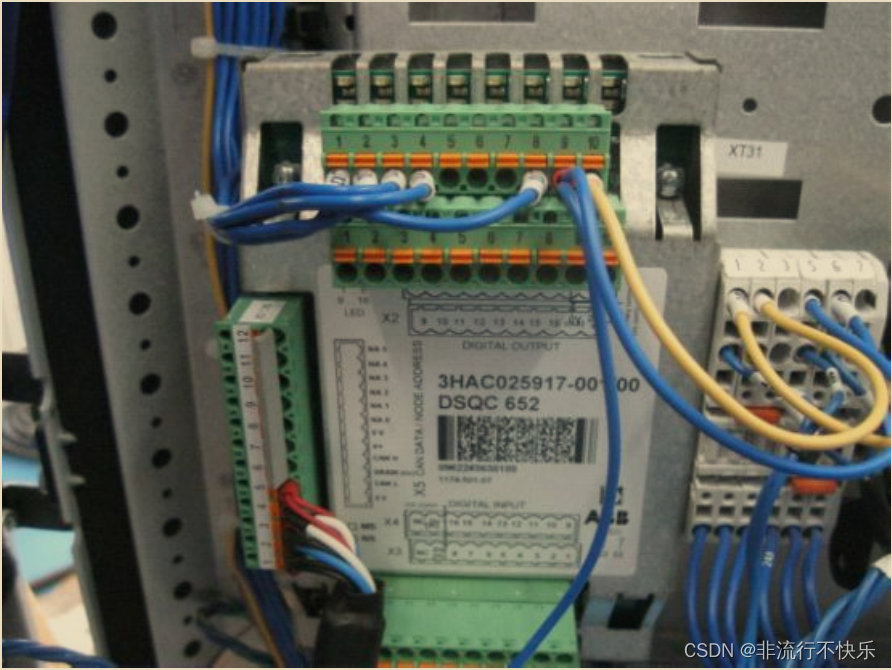
10,i/O单元模块