数据结构——图
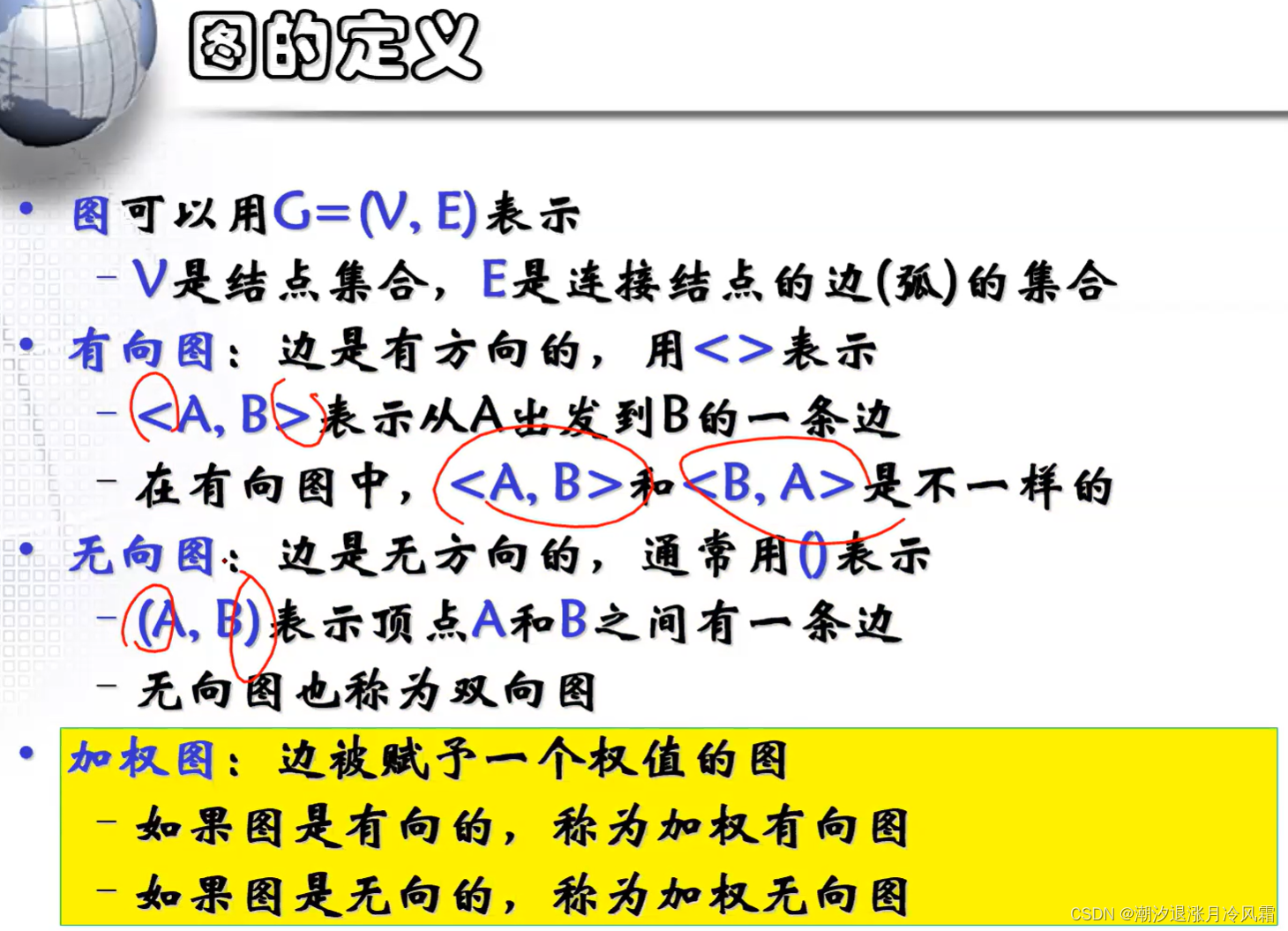
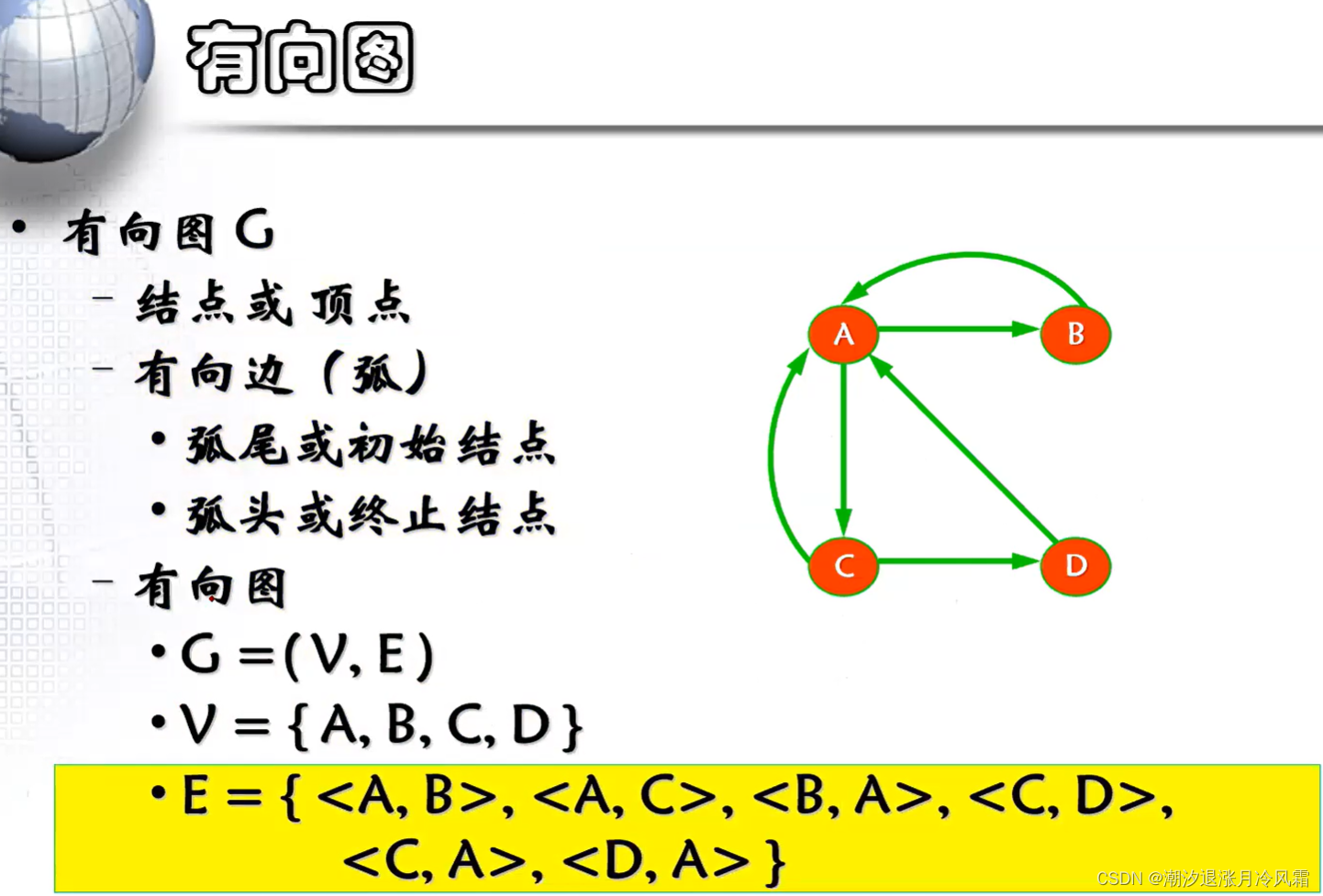
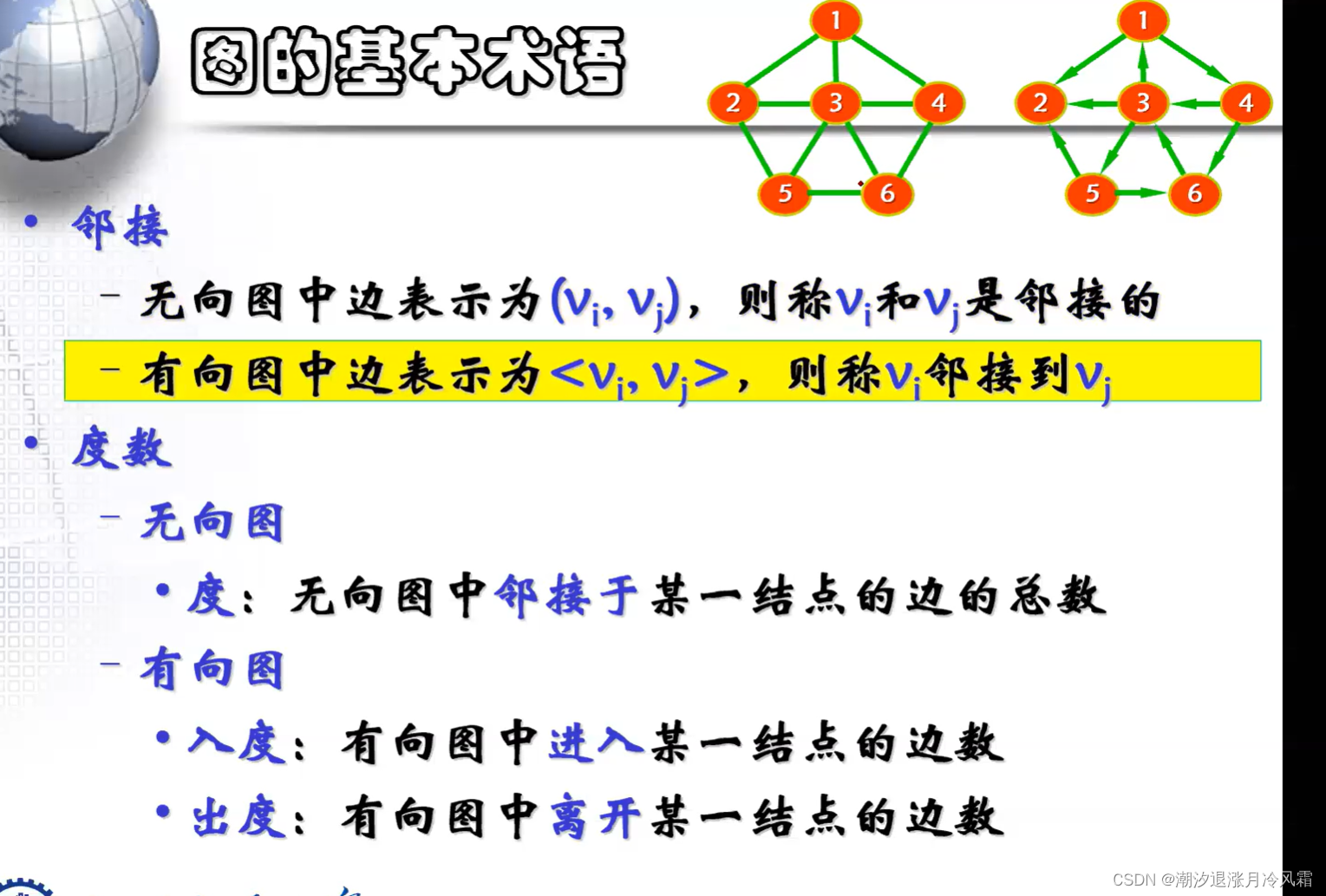
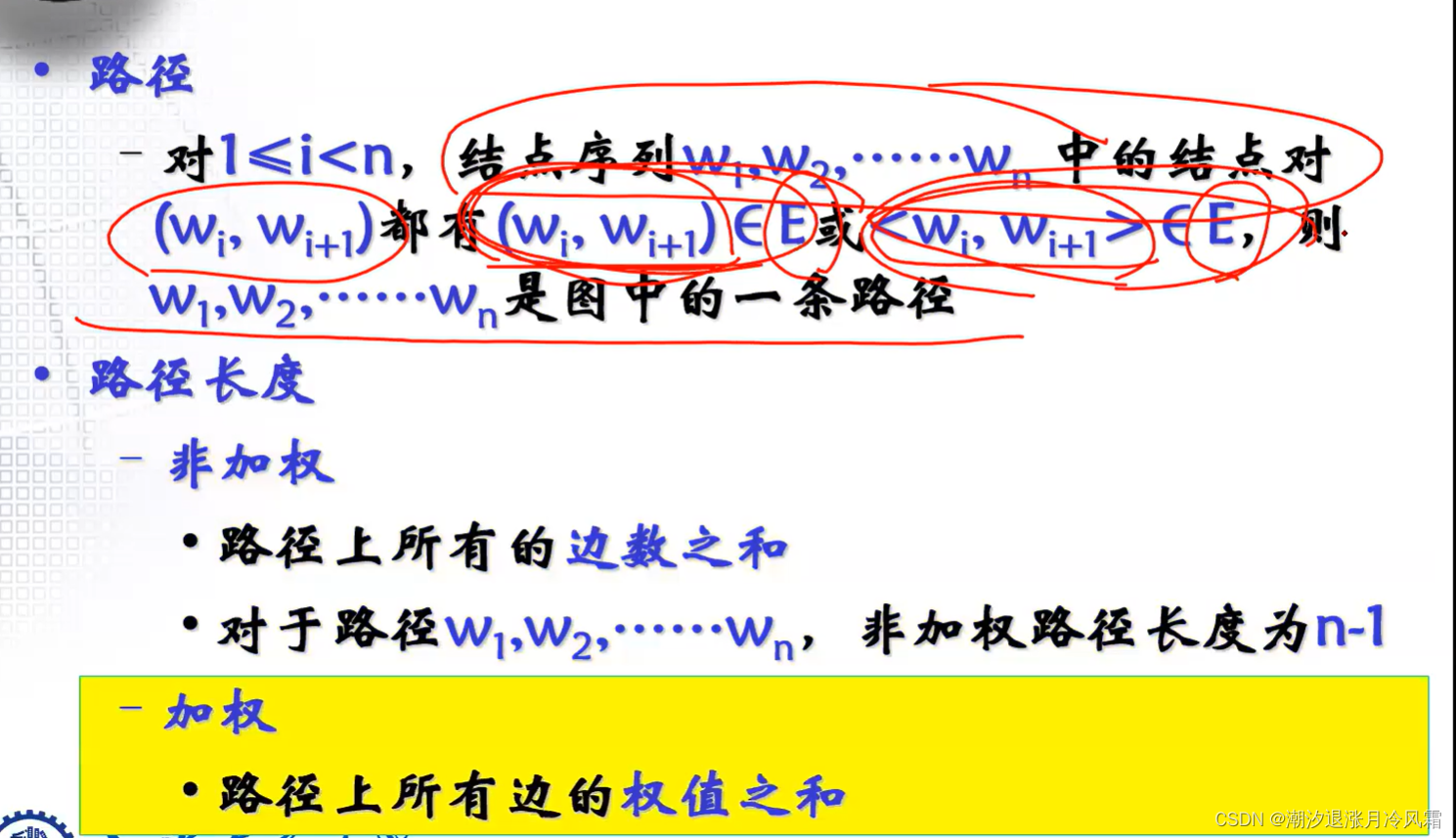
一 图论基本概念
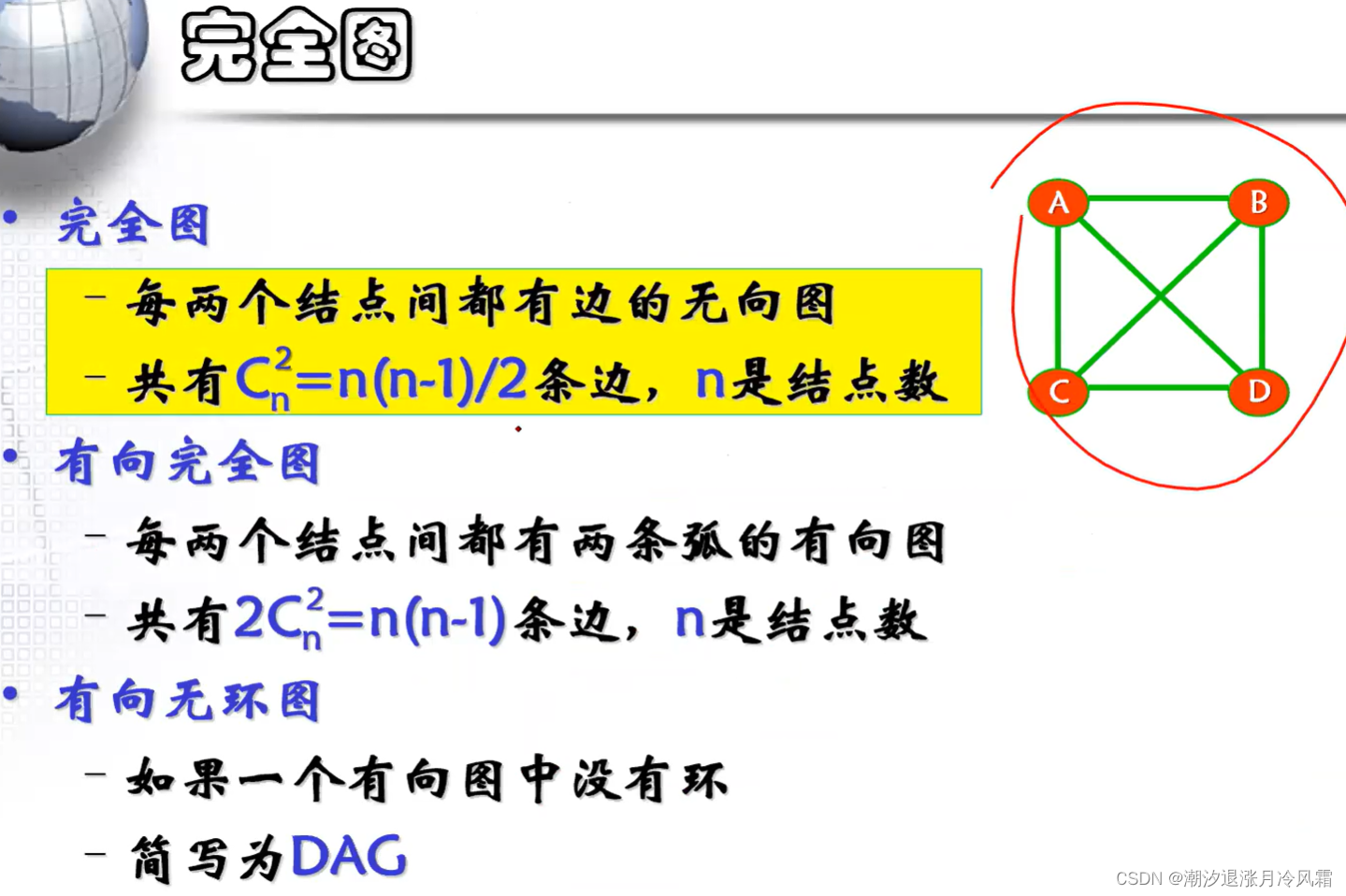
Directed Acyclic Graph (DAG)
二 图的存储
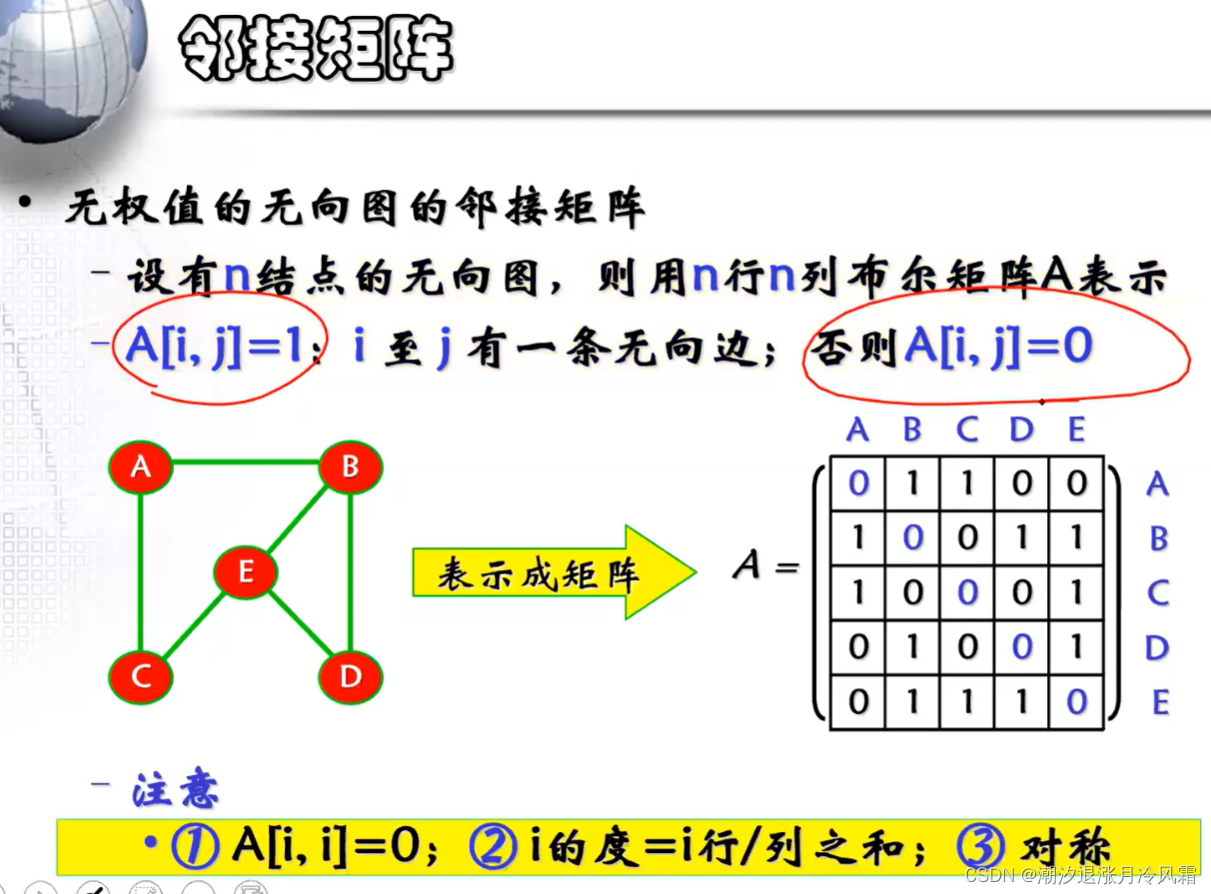
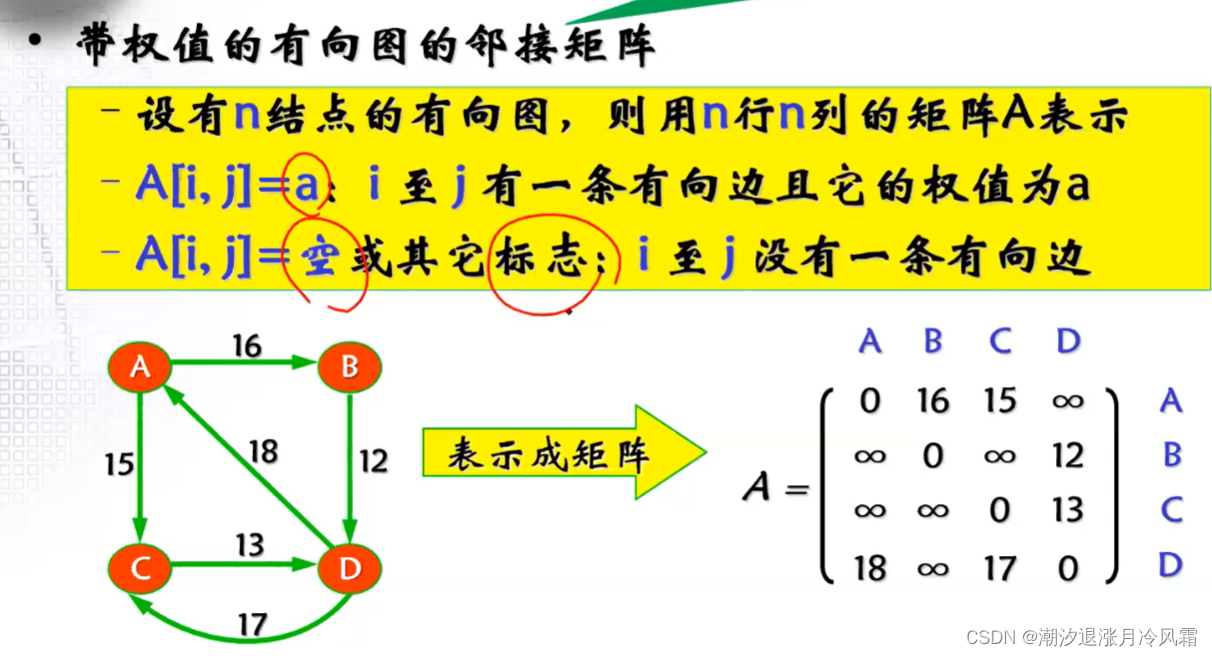
①邻接矩阵(适用于稠密图)
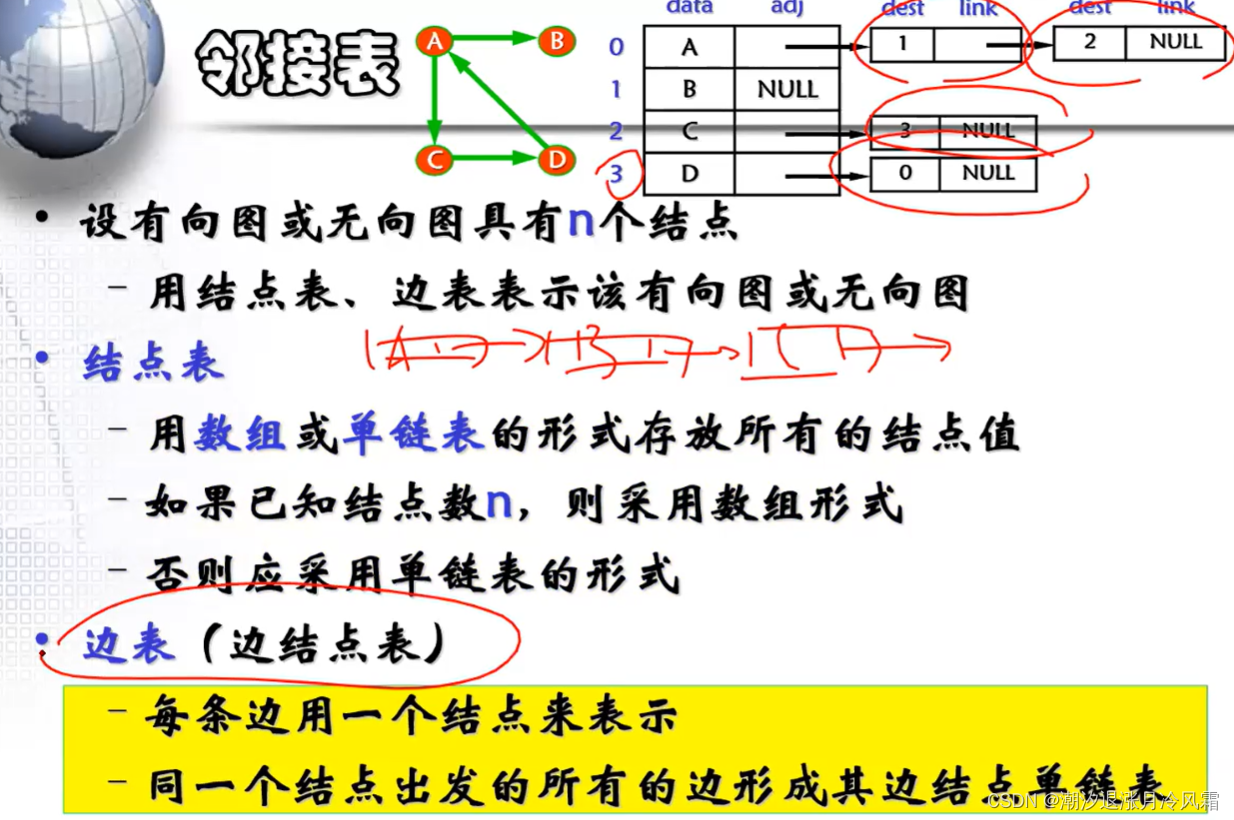
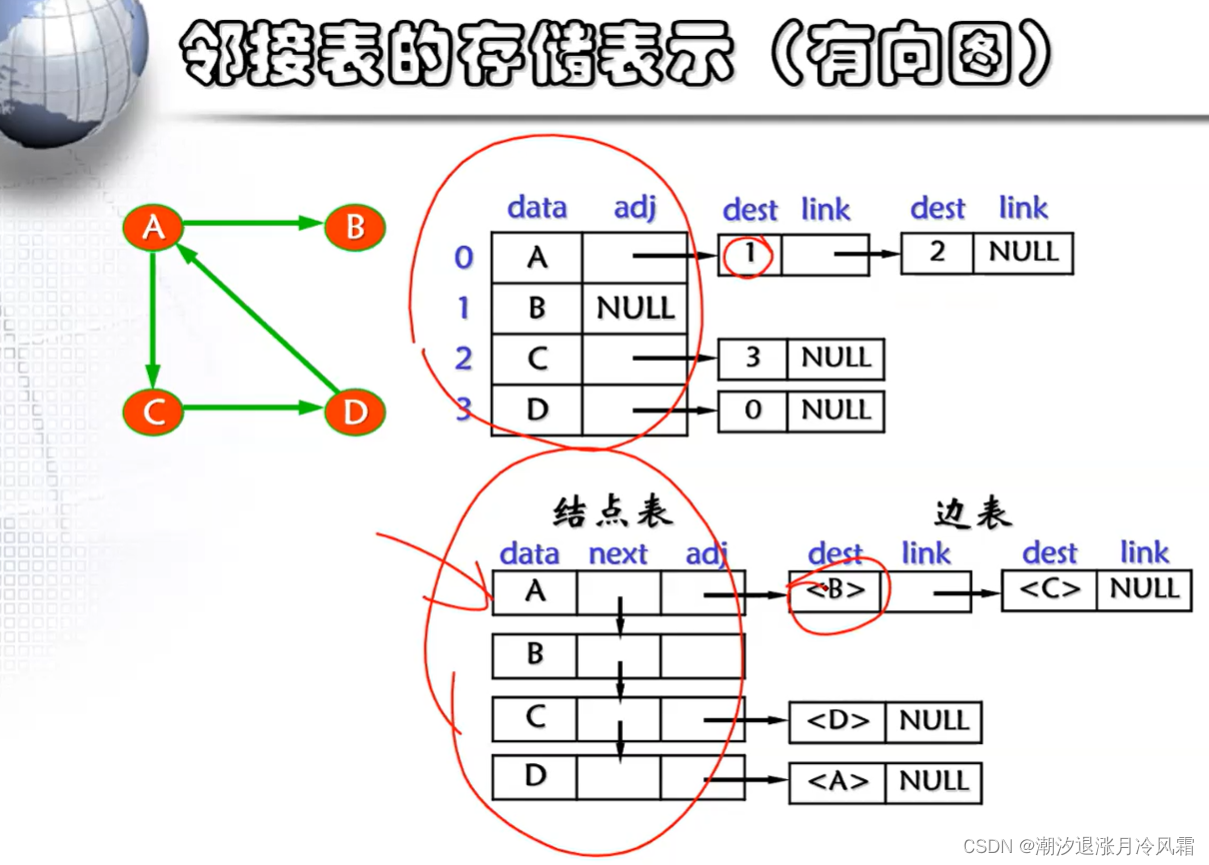
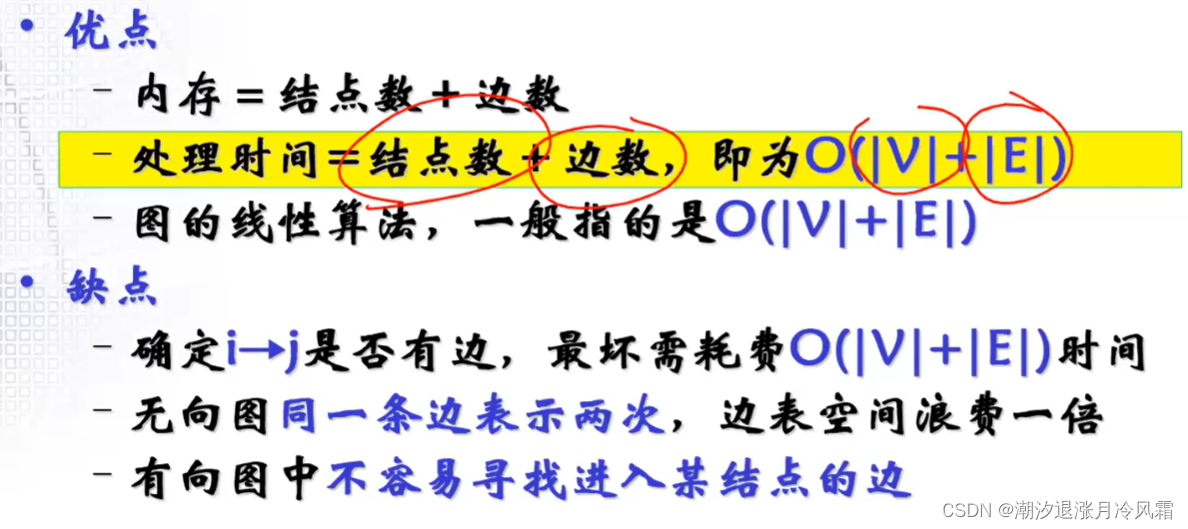
②邻接表(适用于稀疏图)
三、图的遍历
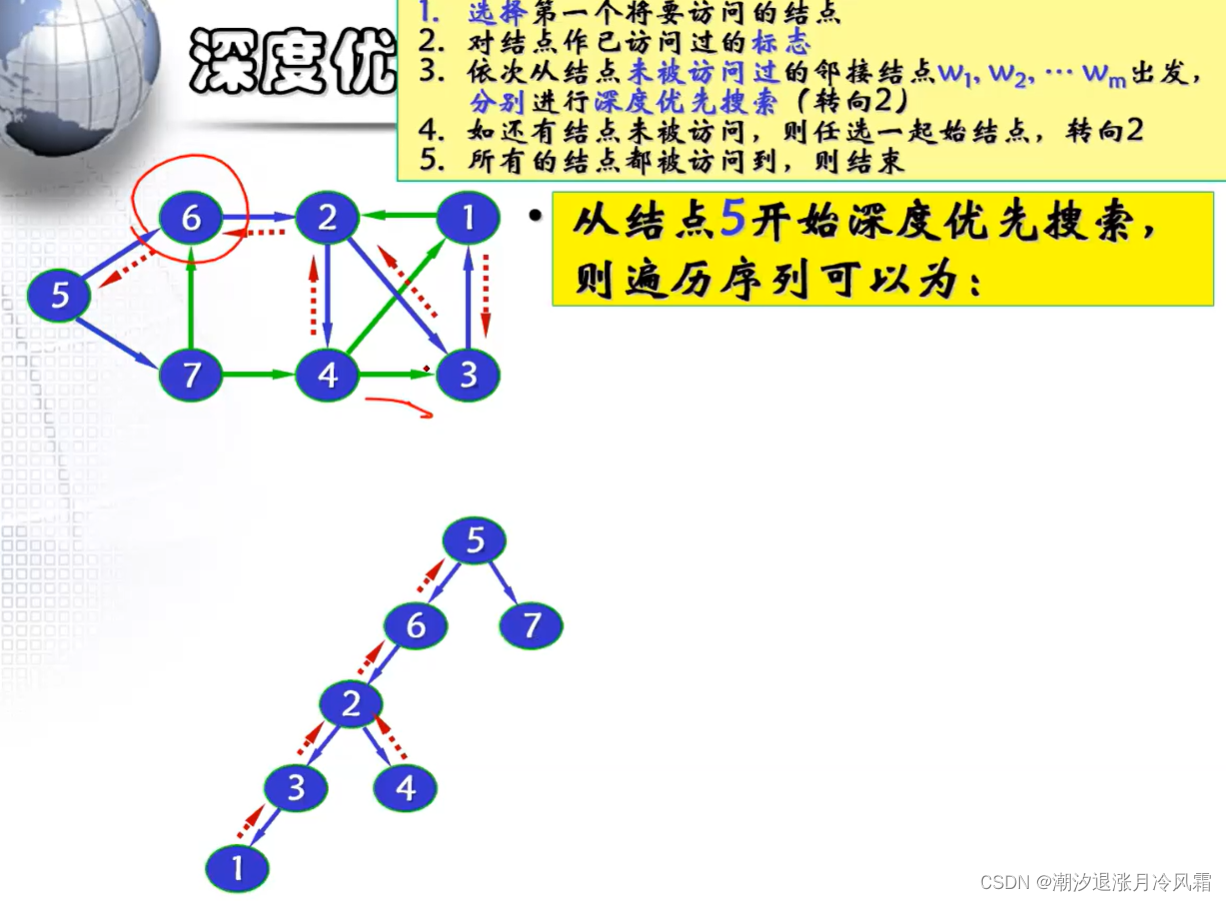
①深度优先搜索
//(基于邻接表实现,以有向图为例)
//DFS:Depth First Search 深度优先搜索
//1、访问起始顶点 2、访问一个未访问过的邻接顶点 3、若所有邻接顶点都已被访问,则回溯 4、所有顶点都被访问,遍历结束
void dfs(int start, bool visited[])
{//访问起始结点cout << verList[start].ver << '\t';visited[start] = true;//找到顶点表中该顶点对应的链表edgeNode* node = verList[start].head;while (node){if (!visited[node]) dfs(visited[node],visited); //访问未访问过的邻接结点node = node->next; //跳过已访问的结点}//当所有邻接结点都已被访问,则回溯
} //递归函数结束时,生成一棵深度优先搜索树void dfs()
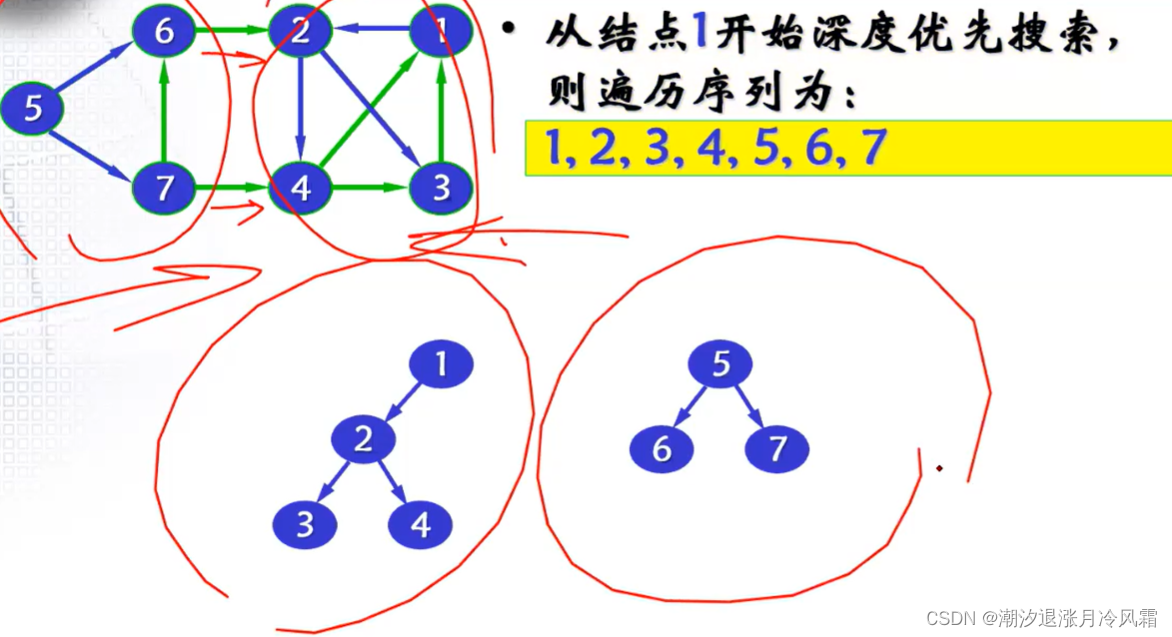
{//访问标志数组初始化bool* visited=new bool[Vers]; //Vers:顶点数量for (int i = 0; i < Vers; i++)Vers[i] = false;for (int i = 0; i < Vers; i++){if (visited[i] == true) continue; //寻找下一个树遍历的起始结点dfs(i, visited);} //生成深度优先搜索森林(起点选择不同,生成结果不同,有些情况能只生成一棵树)
}DFS将所有边和顶点遍历一次,若采用邻接数组,时间复杂度为O(V²),若采用邻接矩阵,时间复杂度为O(V+E)。
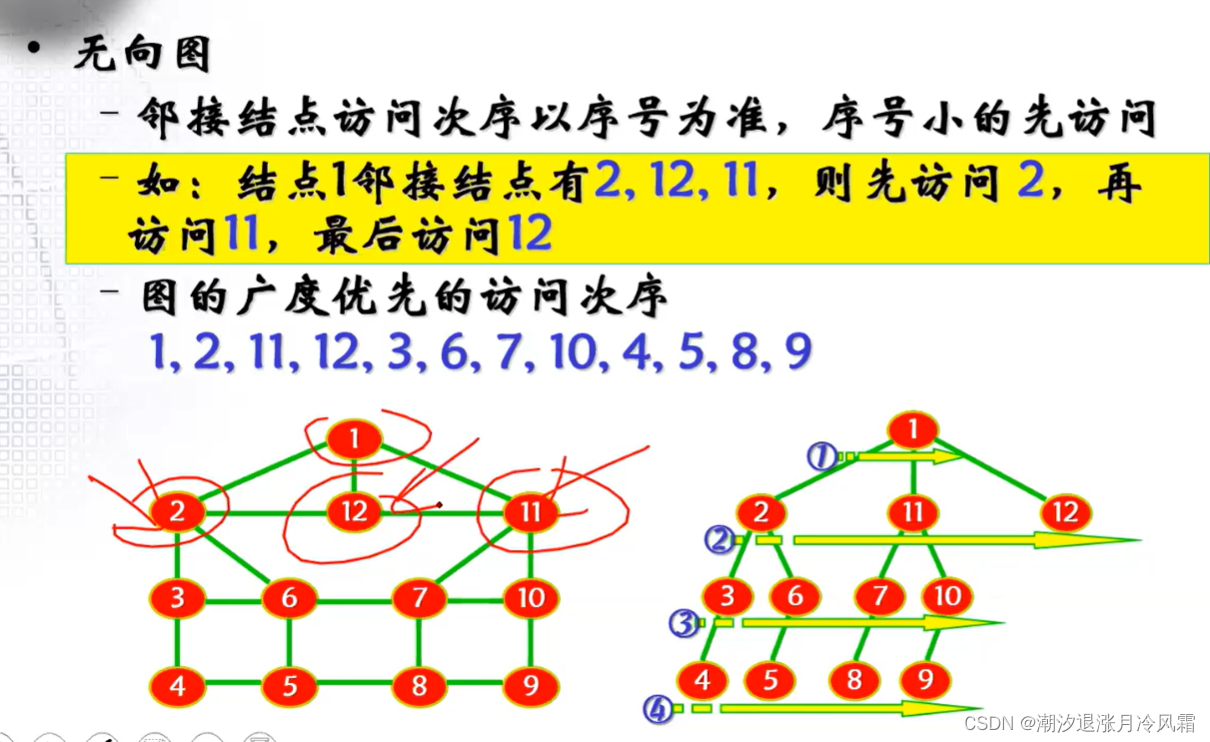
②广度优先搜索
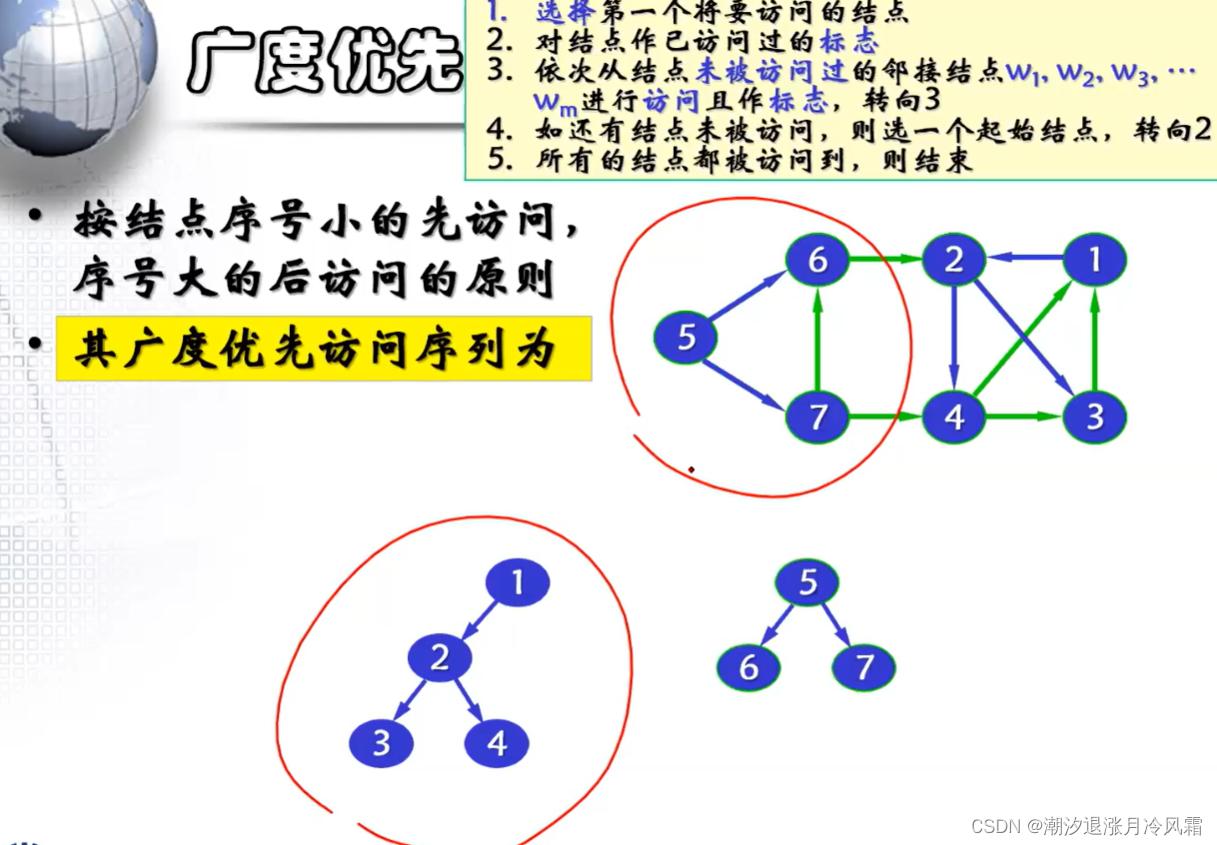
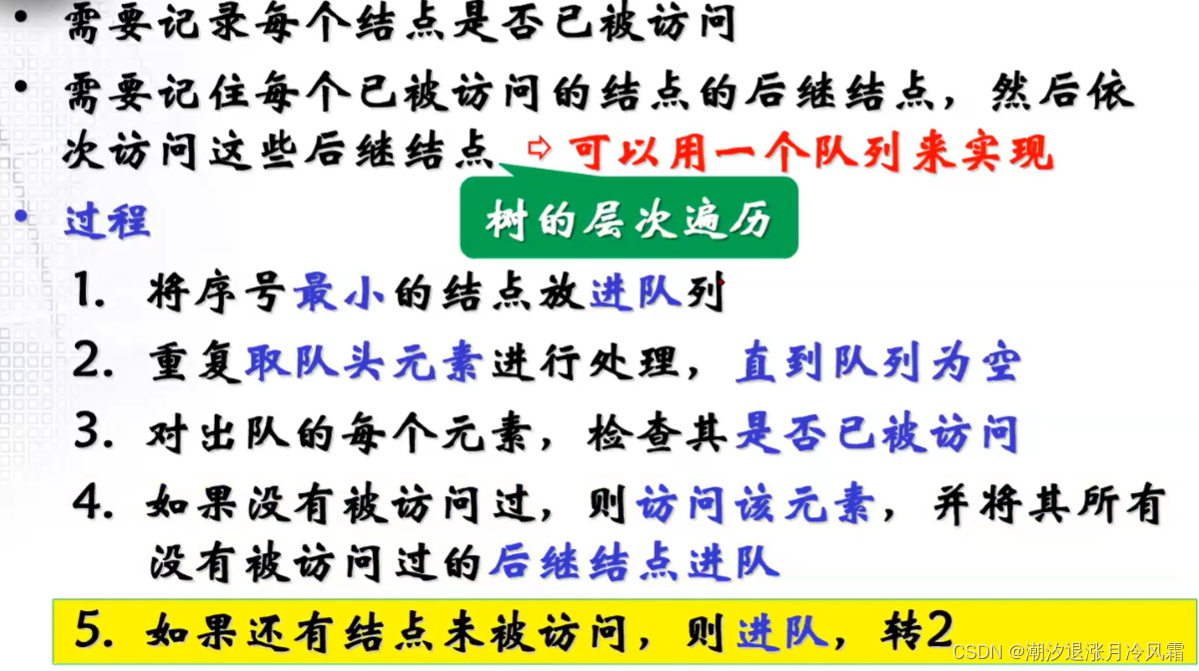
//BFS:Breadth First Search 广度优先搜索
//1、访问起始顶点 2、依次访问起始顶点的所有未访问的邻接结点 3、所有顶点都被访问,遍历结束
void bfs()
{queue<int> q;bool* visited = new bool[Vers];for (int i = 0; i < Vers; i++)visited[i] = false;for (int i = 0; i < Vers; i++){if (visited[Vers] == true) continue; ///寻找一棵新的搜索树的起始结点q.push(i); //结点入队,开始一棵搜索树的生成while (!q.empty()){int currentNode = q.front();q.pop();if (visited[currentNode]) continue; //这里需要注意,比如1的邻接结点2、3入队,而3邻接于2,在访问3的过程中已访问了2,所以2出队时无需再次访问cout << verList[currentNode].ver << '\t'; //访问当前结点visited[currentNode] = true;//找到顶点表中该顶点对应的链表edgeNode* node = verList[currentNode].head;//将未访问的邻接顶点入队while (node){if (!visited[node->end]) q.push(node->end); //将未访问的邻接顶点入队node = node->next;} }}
}
可用优先级队列实现。
BFS将所有边和顶点遍历一次,若采用邻接数组,时间复杂度为O(V²),若采用邻接矩阵,时间复杂度为O(V+E)。
四、图的应用
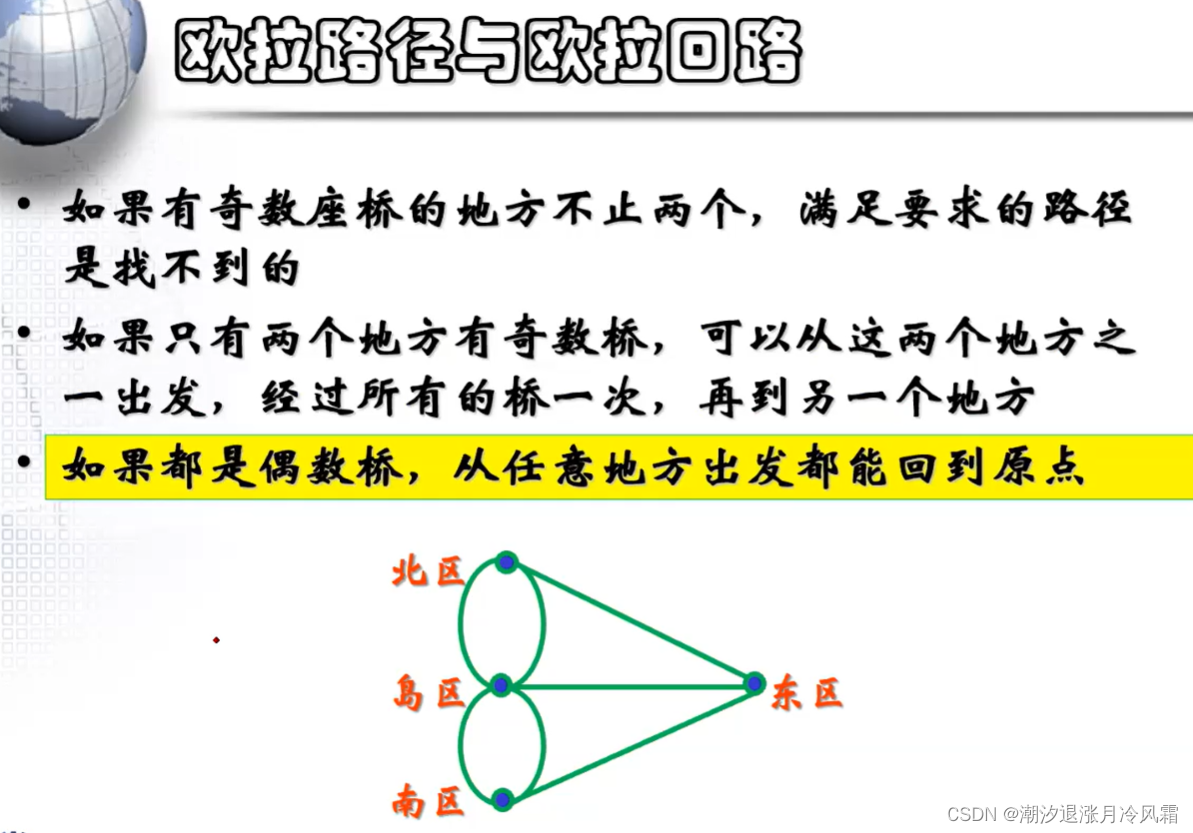
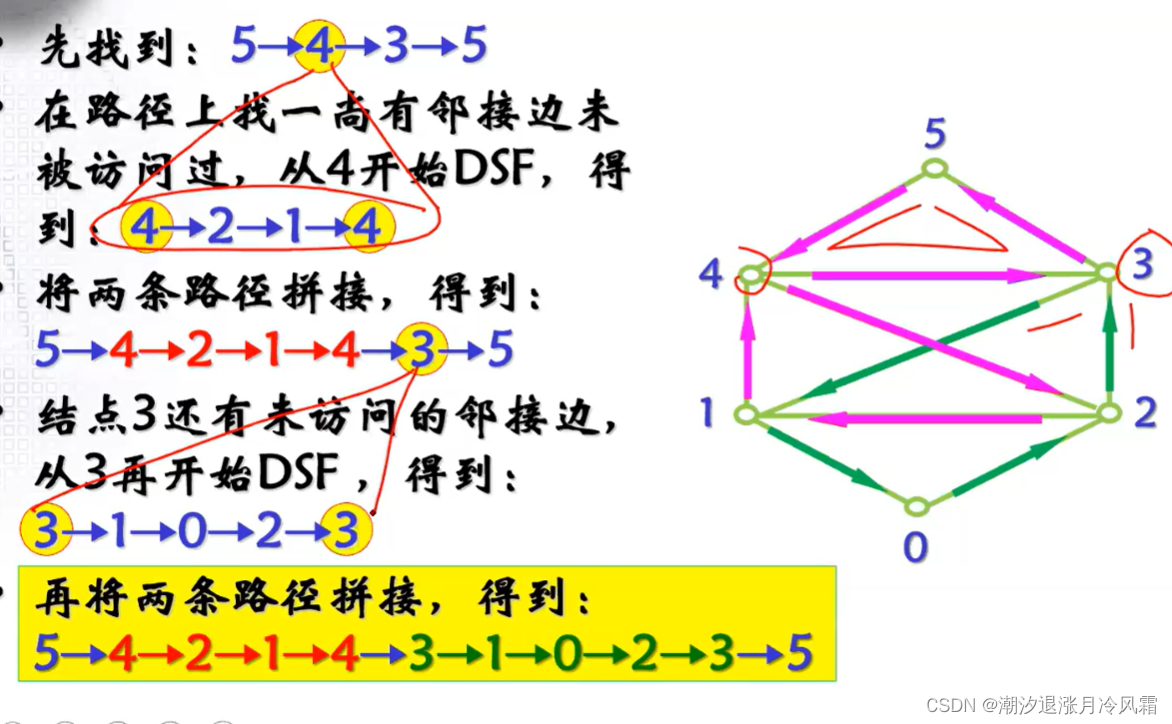
1、欧拉路径(一笔画问题)
欧拉路径:在图中找到一条路径经过每一条边,且每条边只经过一次
欧拉回路:起点和终点相同的欧拉路径
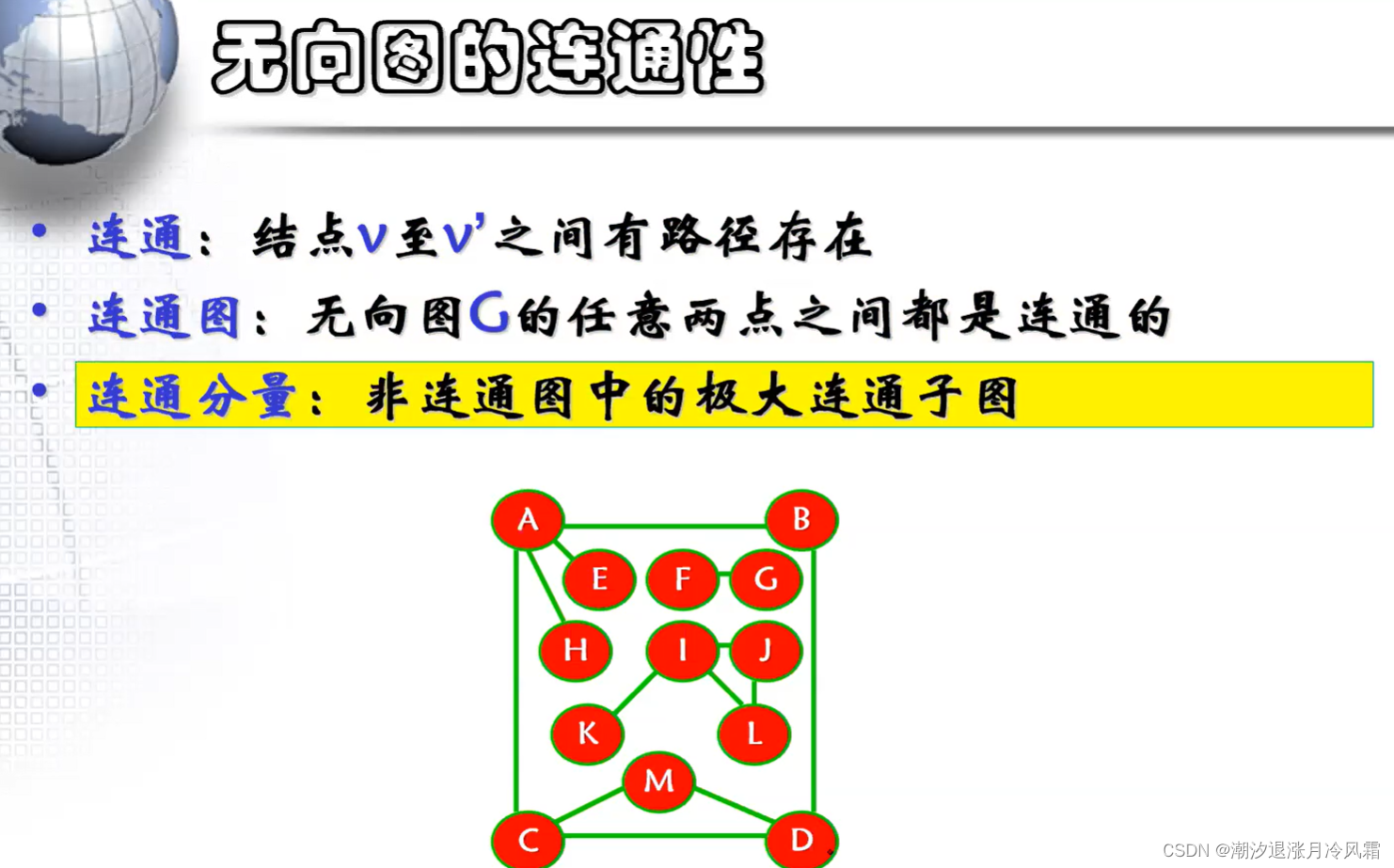
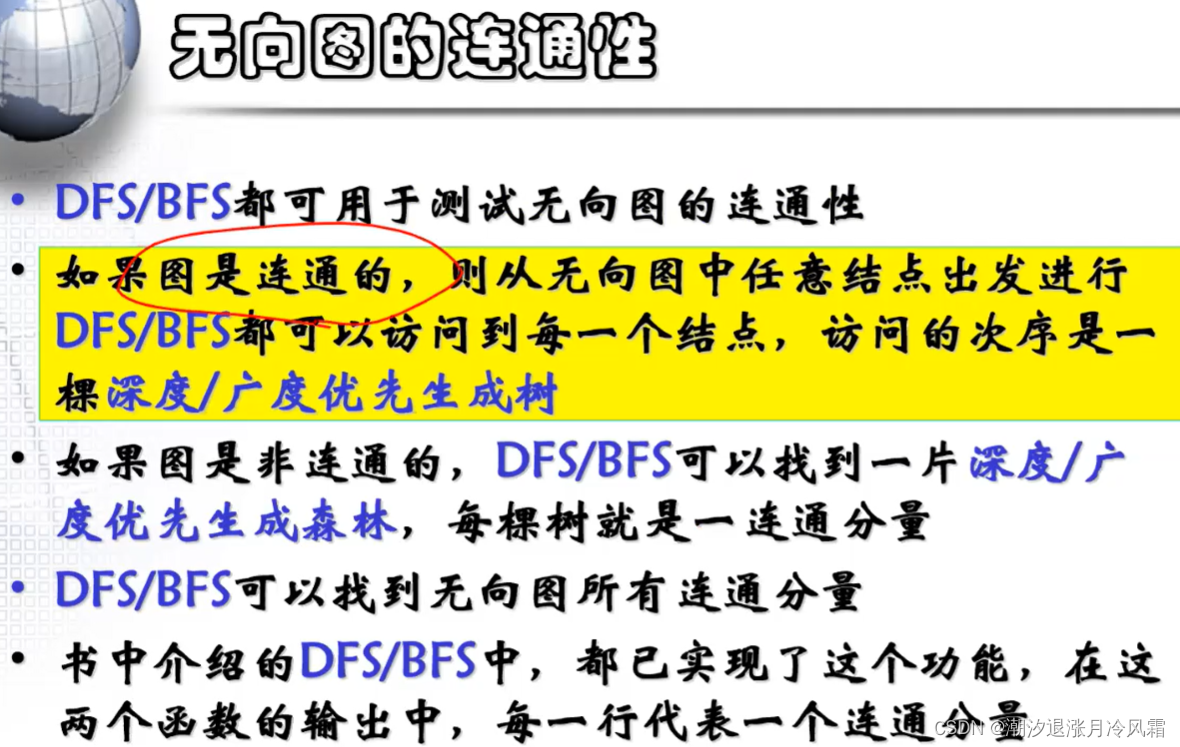
2、图的连通性
①无向图的连通性
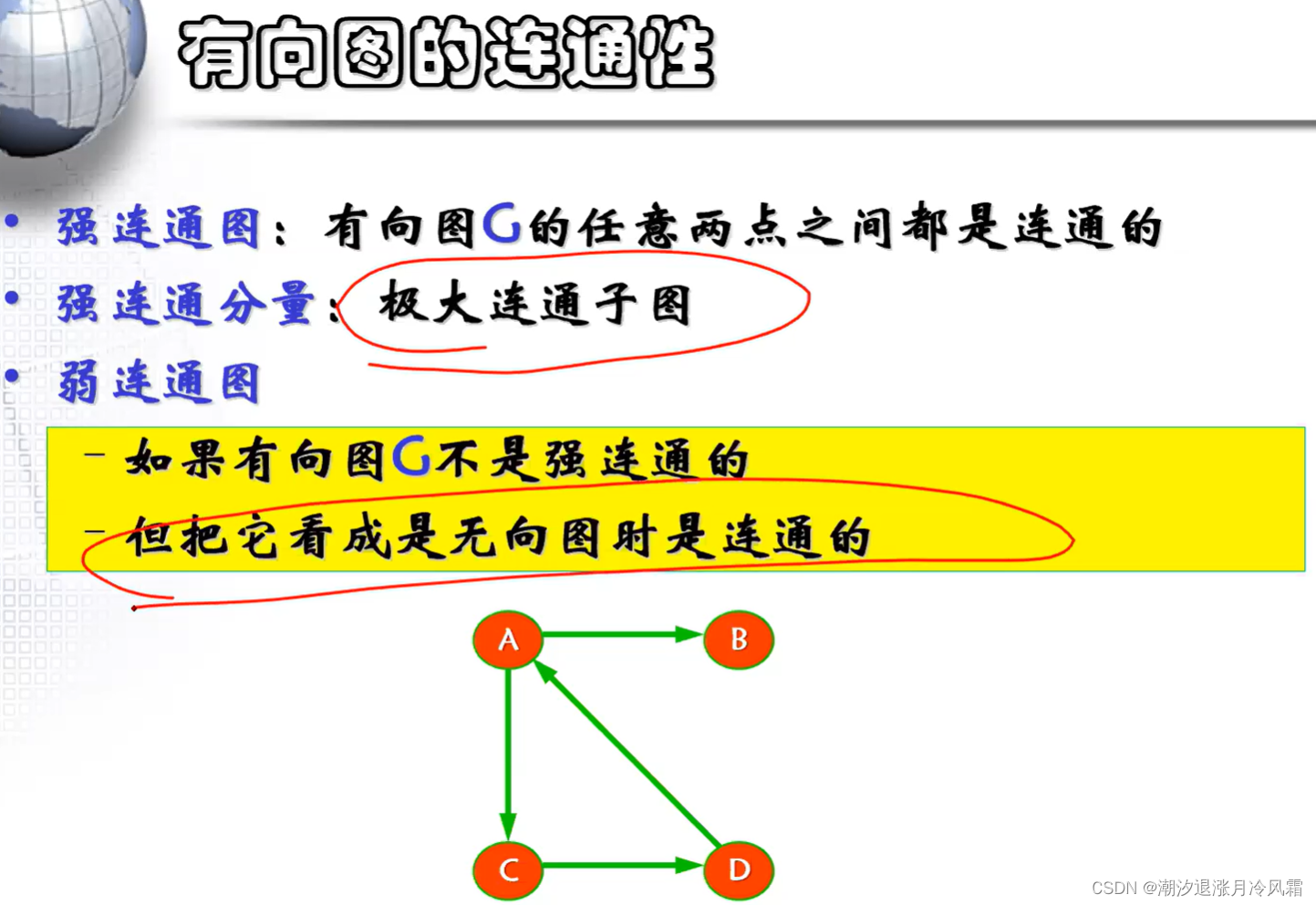
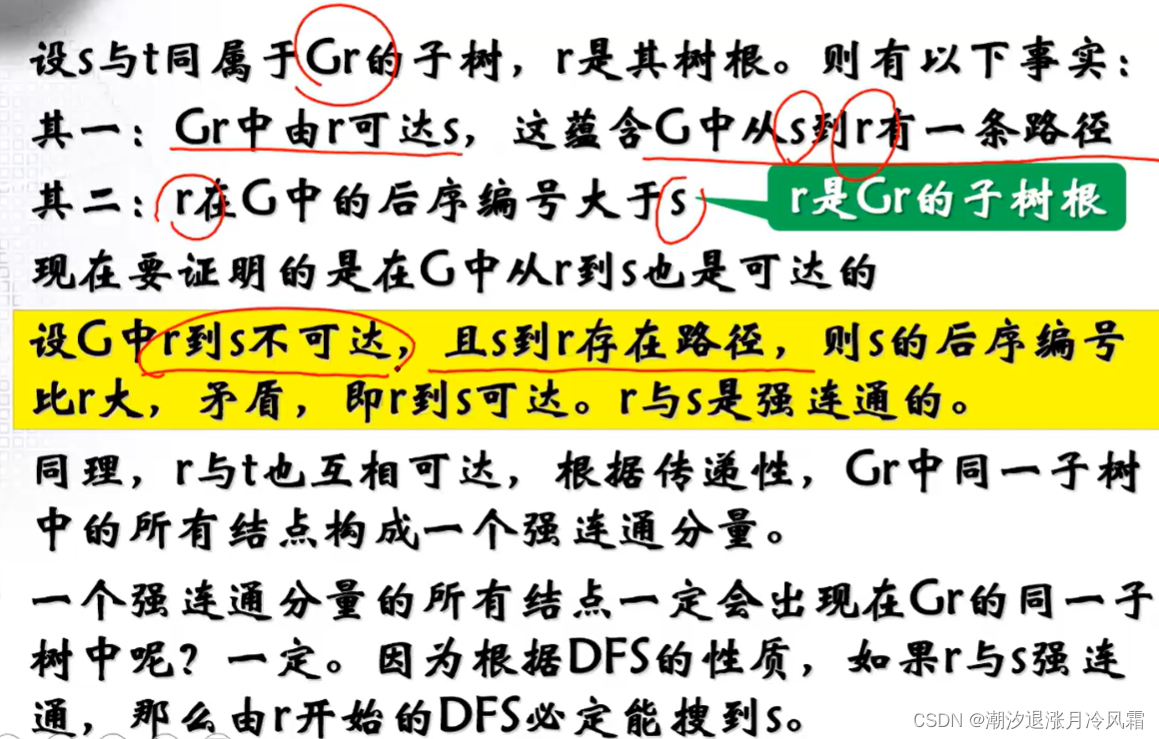
②有向图的连通性(Kosaraju算法)
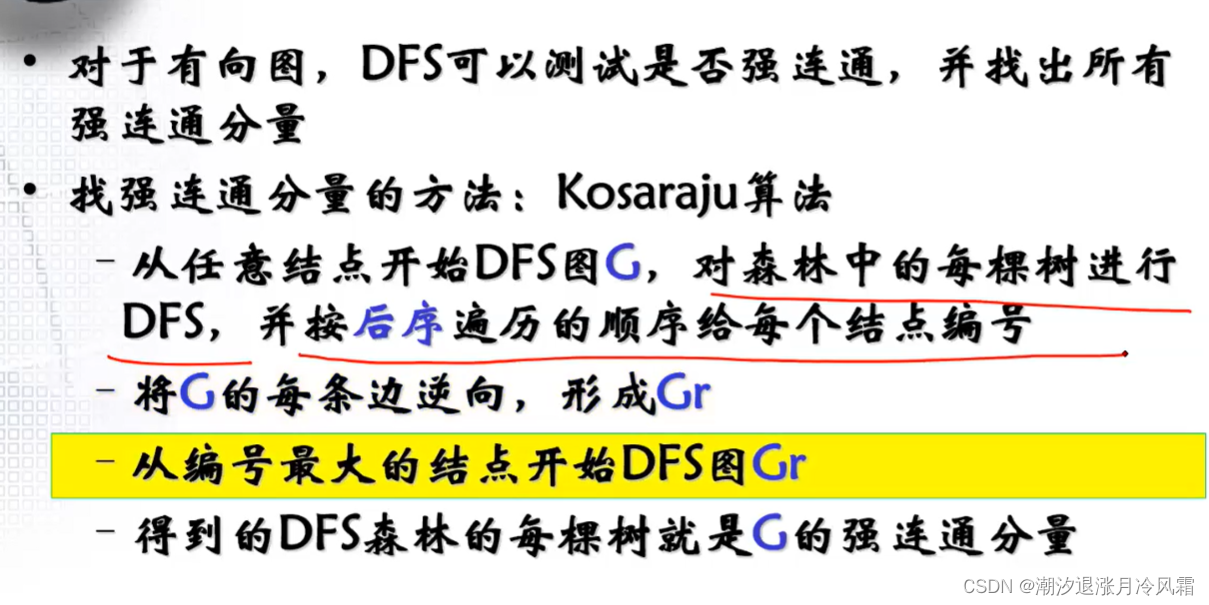
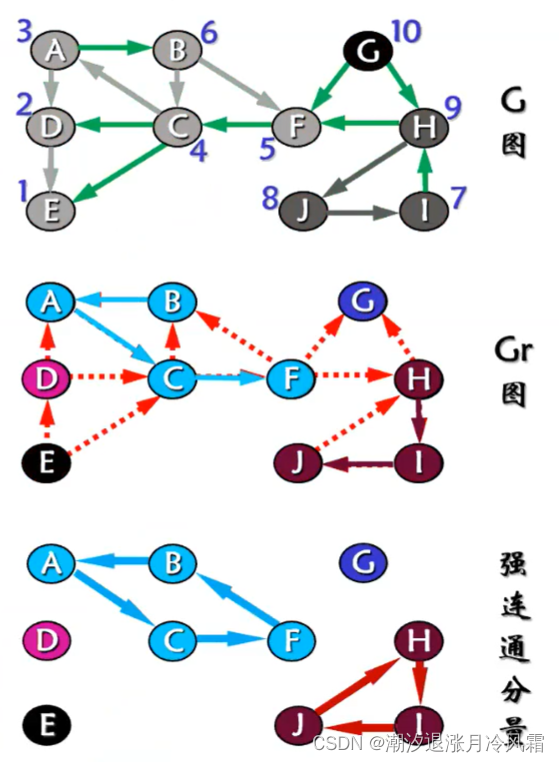
G图和Gr图分别进行一次dfs,时间复杂度为O(V+E)
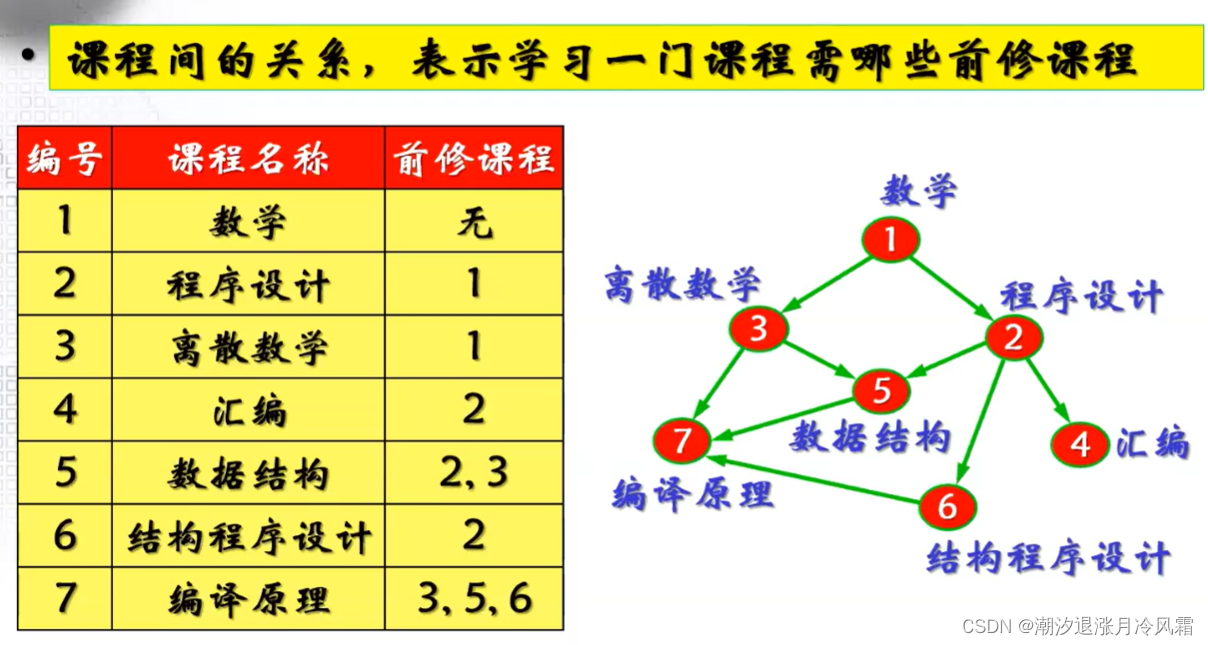
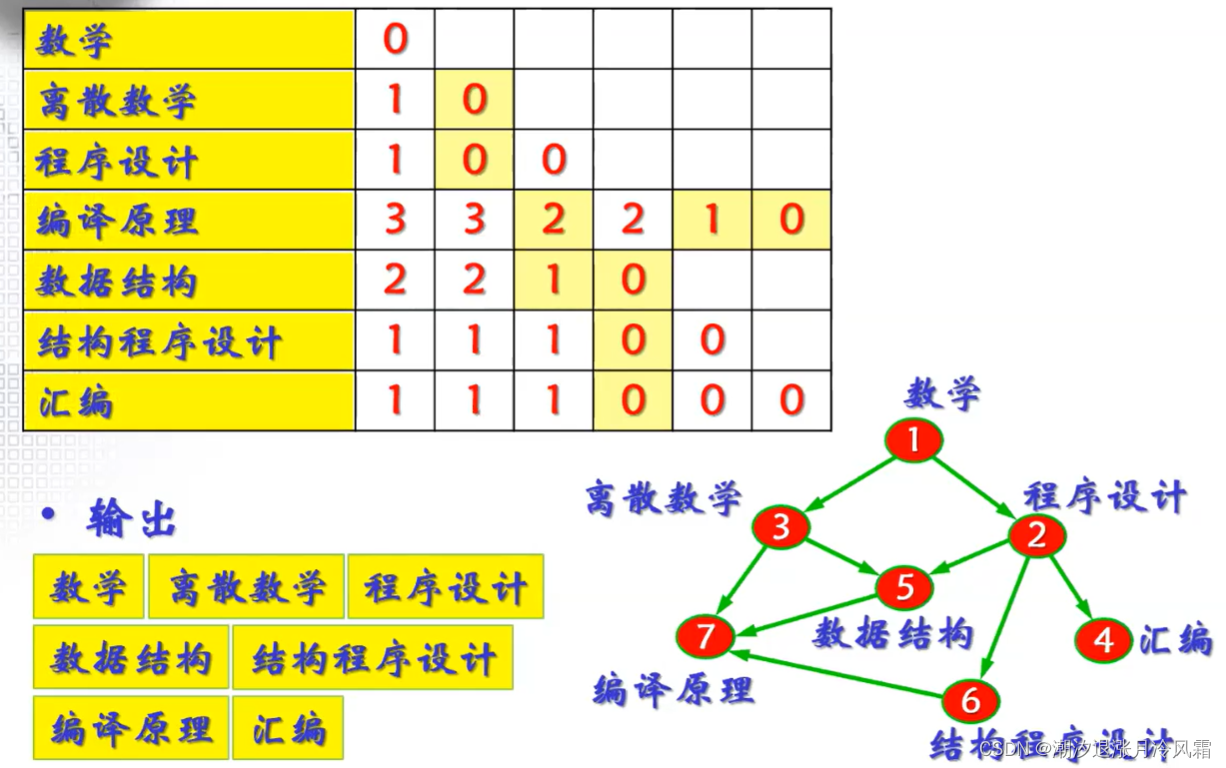
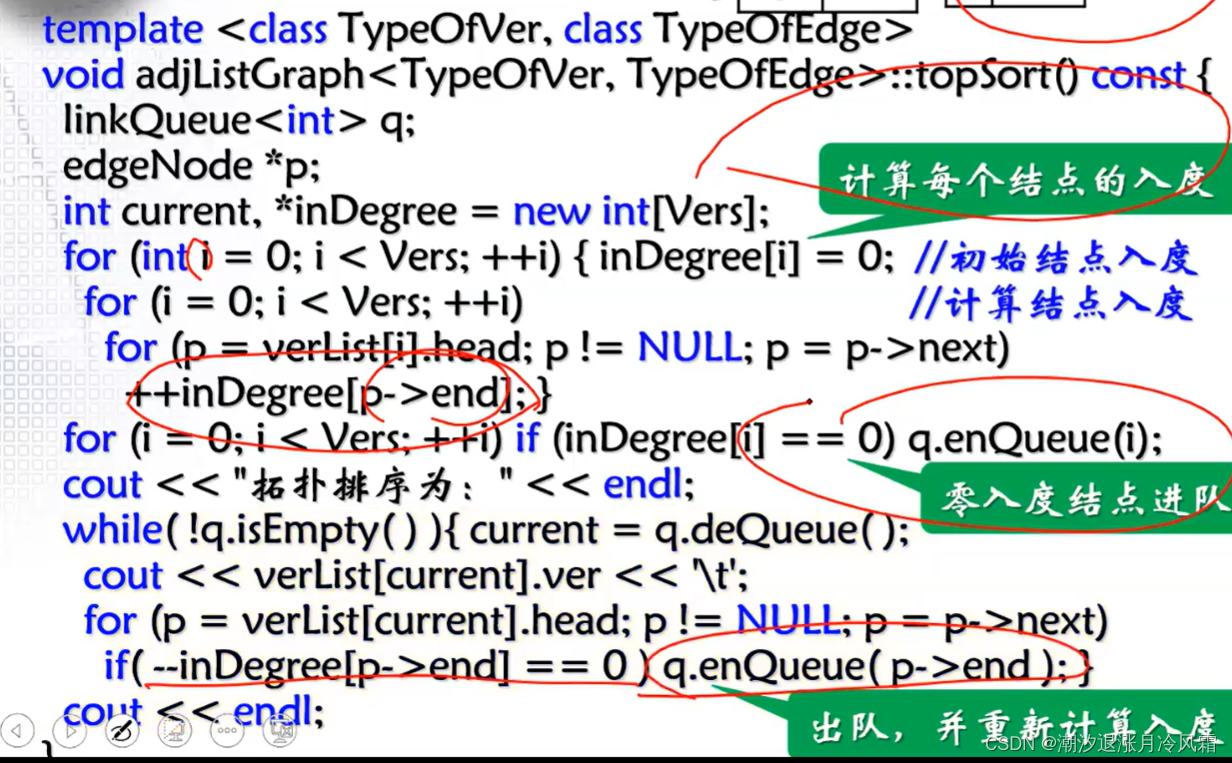
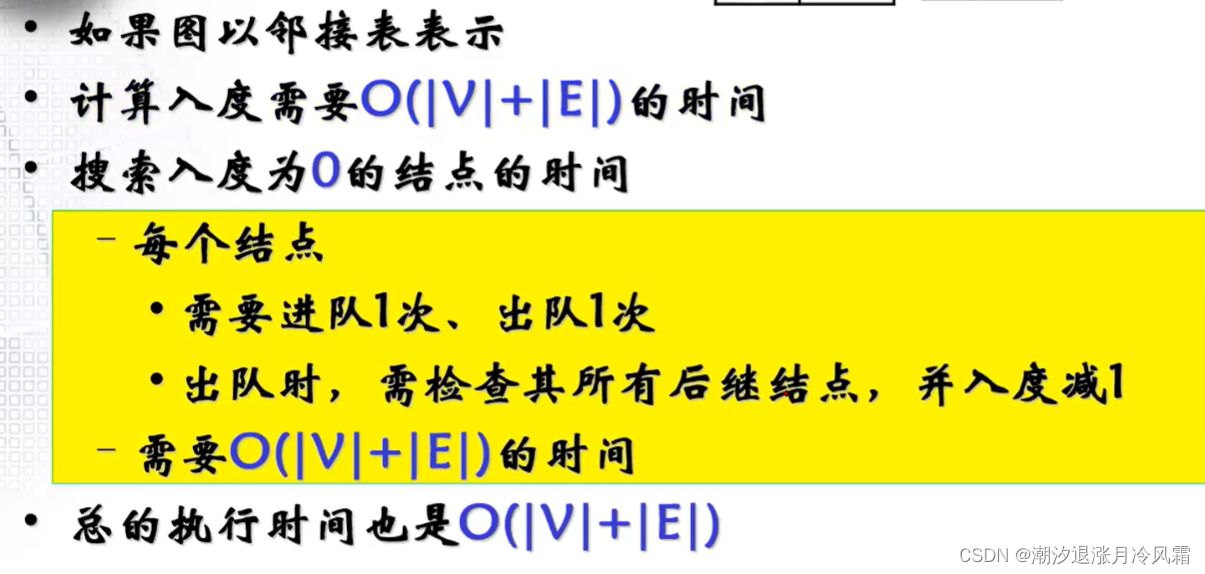
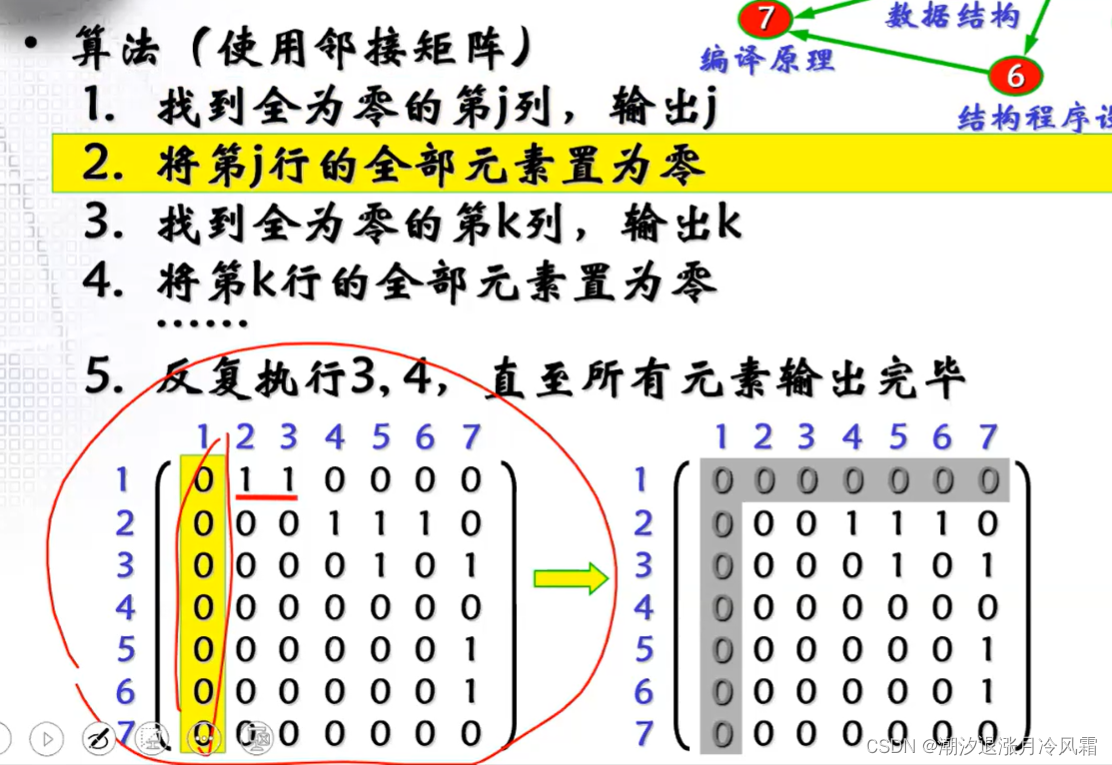
3、拓扑排序
能进行拓扑排序的图是有向无环图(DAG),顶点表示活动的图称为AOV网((activity on the vertex)
4、关键路径
AOE(activity on the edge)网是另一种有向无环图,有向边的权值表示活动的持续时间,弧尾表示活动的起点,弧头表示活动的终点,边的方向表示事件发生的先后顺序。可以用AOE网表示一项工程,如下图A为工程的源点,G为工程的收点。关键路径具有从源点到收点的最长路径长度,其上的活动称为关键活动。
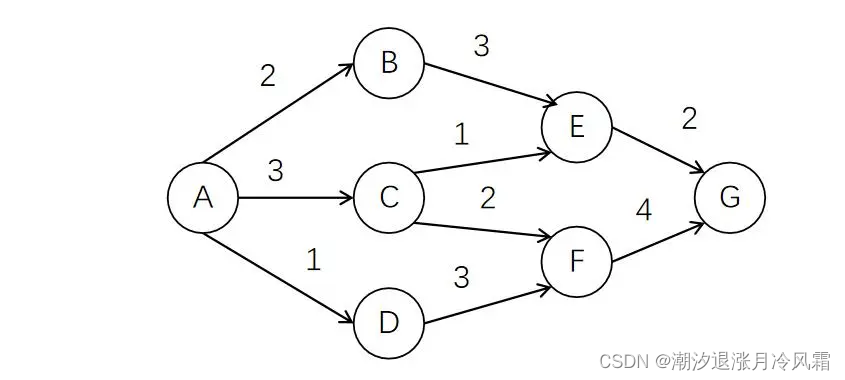
顶点x的最早发生时间为ee(x),最晚发生时间为le(x),定义le(x)-ee(x)=△e(x)为时间余量,满足△e(x)=0的顶点x为关键活动,找到所有时间余量为0的顶点即找到了关键路径。
算法实现:
①进行拓扑排序
②按照拓扑序列,正向遍历每一个顶点x,计算最早发生时间ee(x):
所有顶点的ee初始化为0,假设边<u,v>的长度为Luv,对于每一个顶点u,检查其后继顶点v,若ee(u)+Luv>ee(v),更新ee(v)=ee(u)+Luv 。ee(G)即为工程的最短完成时间,即关键路径的长度Len.
③按照拓扑序列,逆向遍历每一个顶点x,计算最晚发生时间le(x):
所有顶点的le初始化为Len,假设边<u,v>的长度为Luv,对于每一个顶点u,检查其后继顶点v,若le(v)-Luv<le(u),更新le(u)=le(v)-Luv 。
④计算△e(x)=le(x)-ee(x),输出△e(x)=0的顶点即为关键活动,构成一条关键路径。
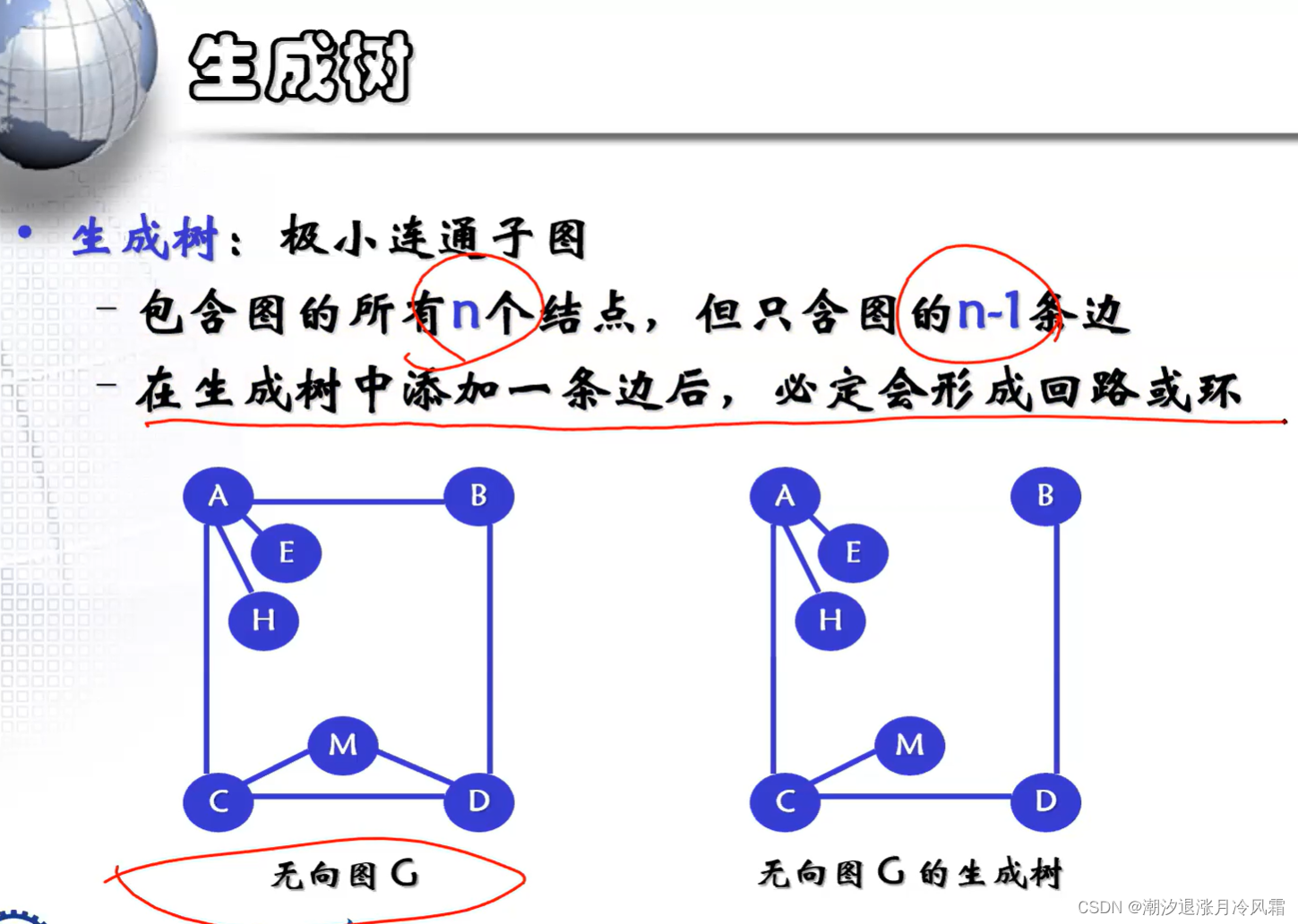
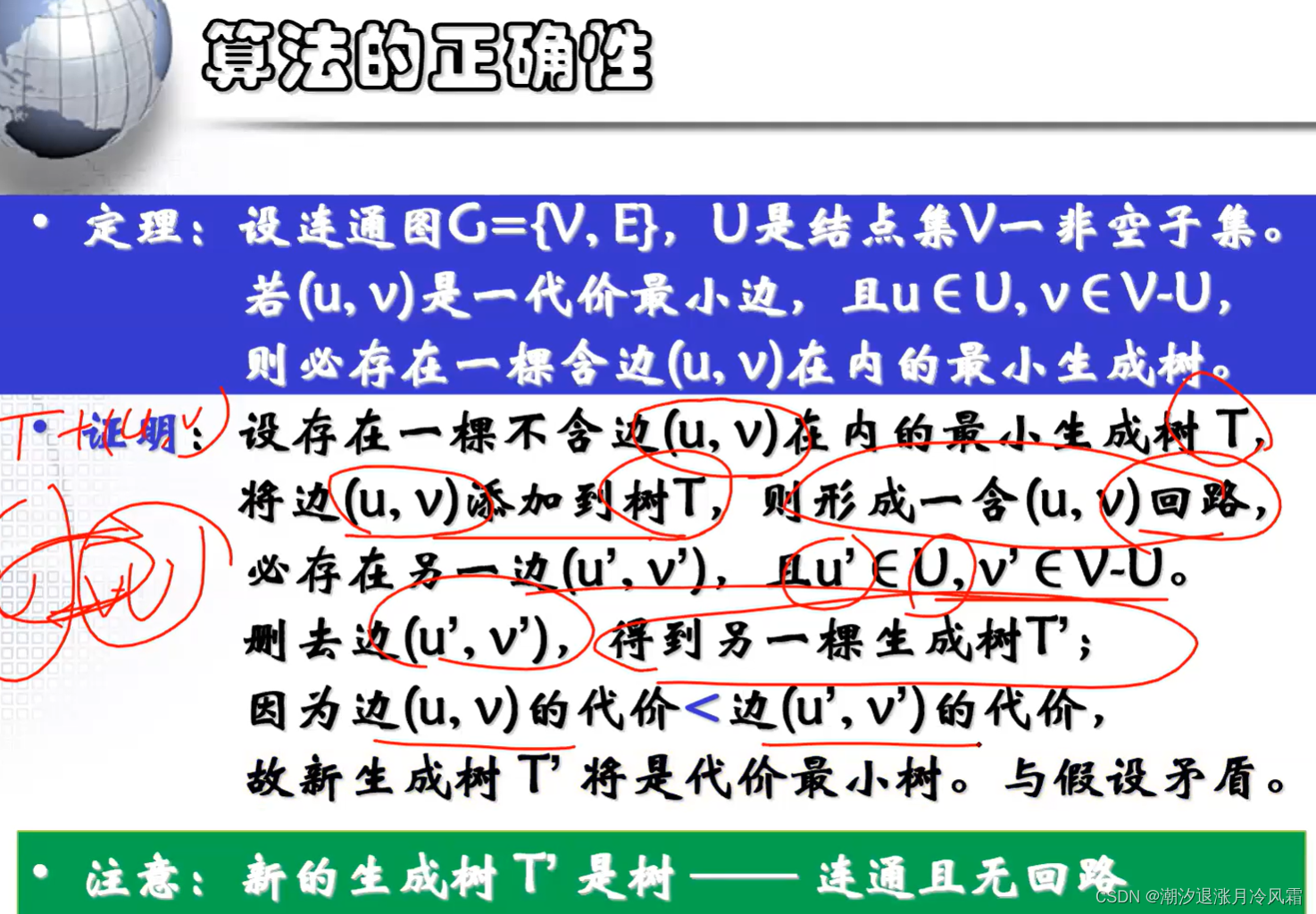
5、最小生成树
最小生成树:边的权值之和最小的生成树
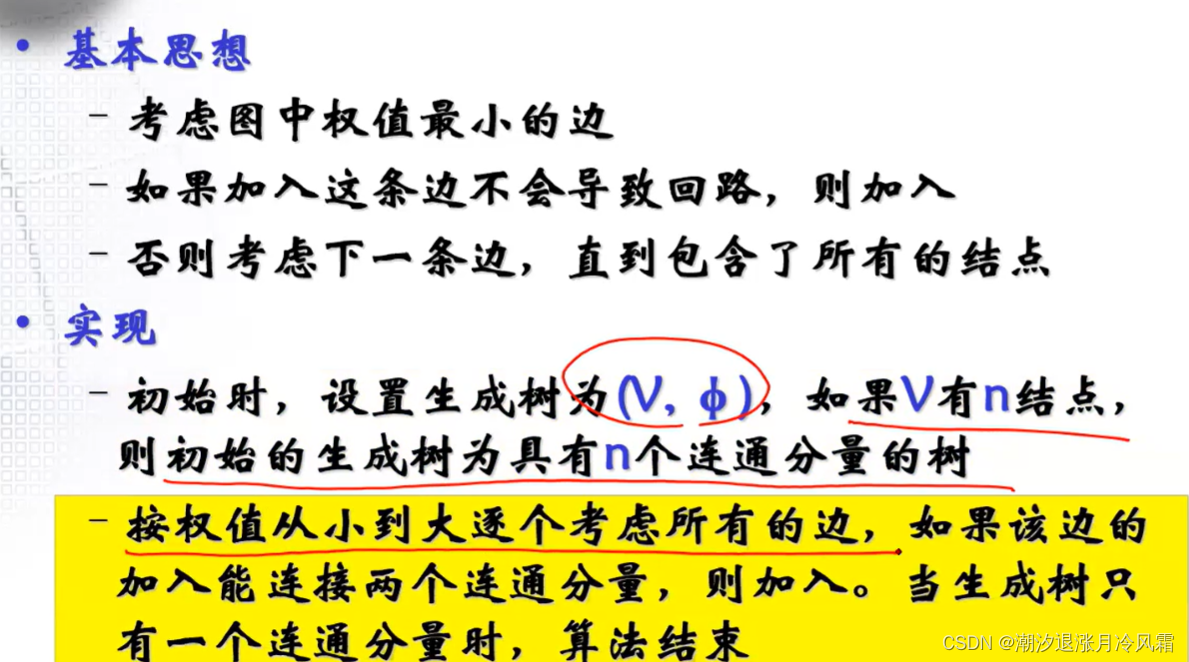
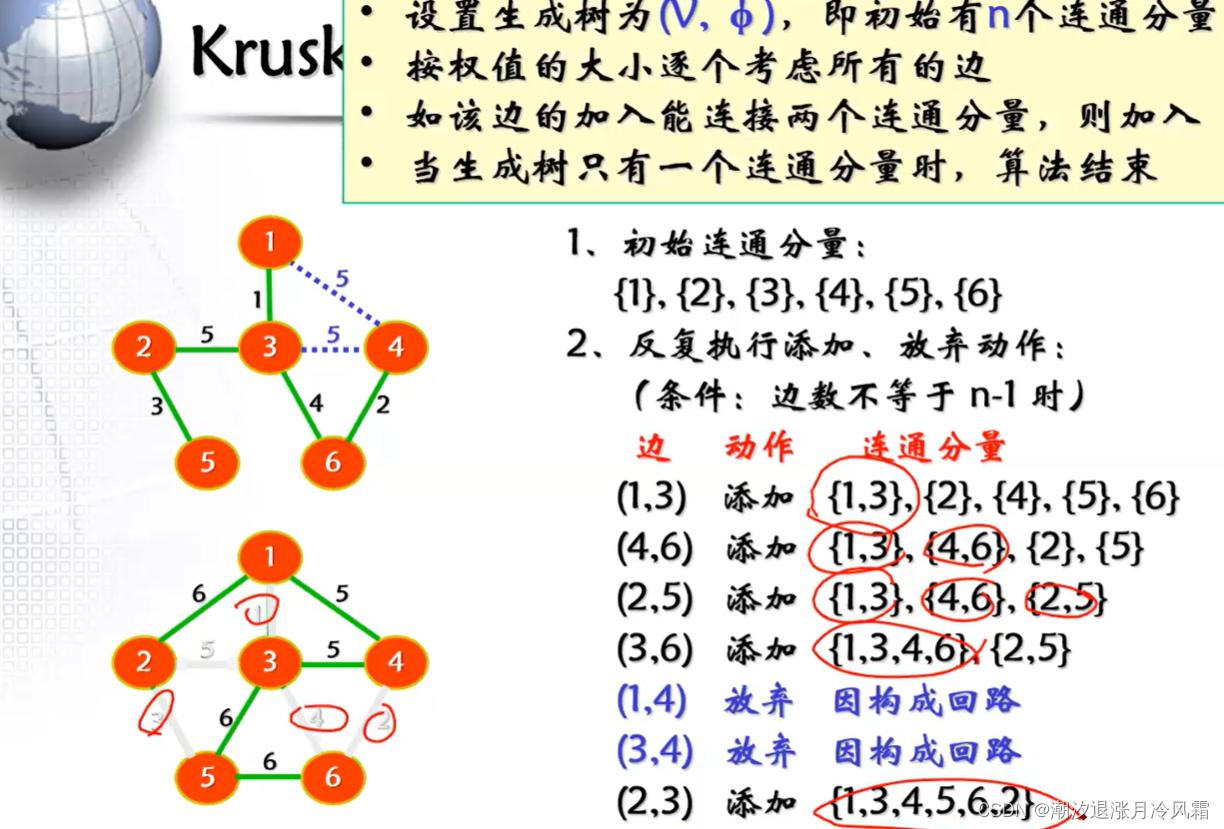
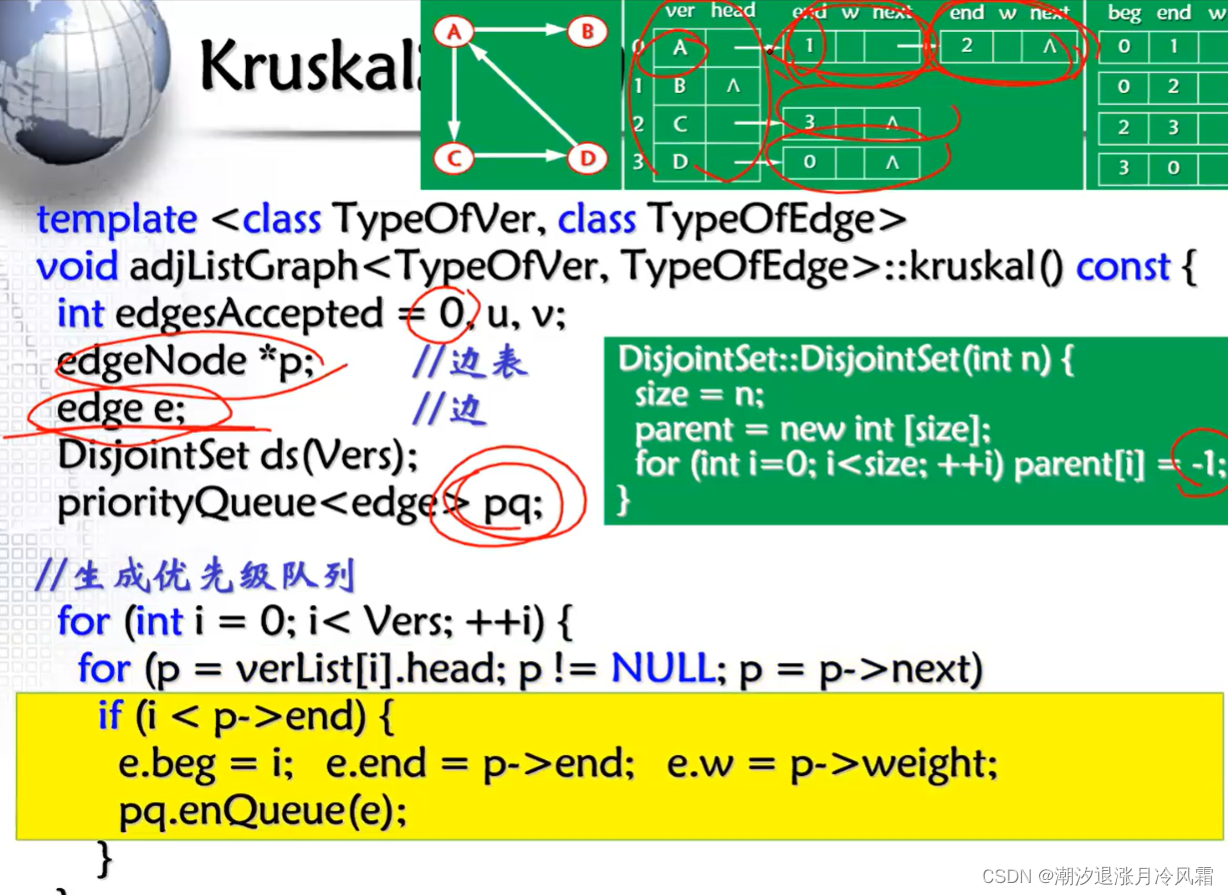
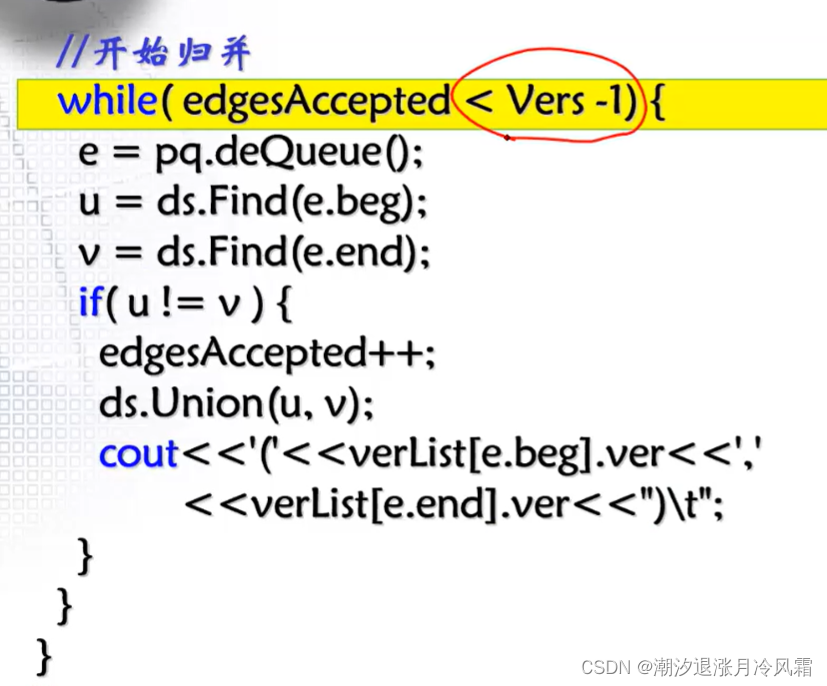
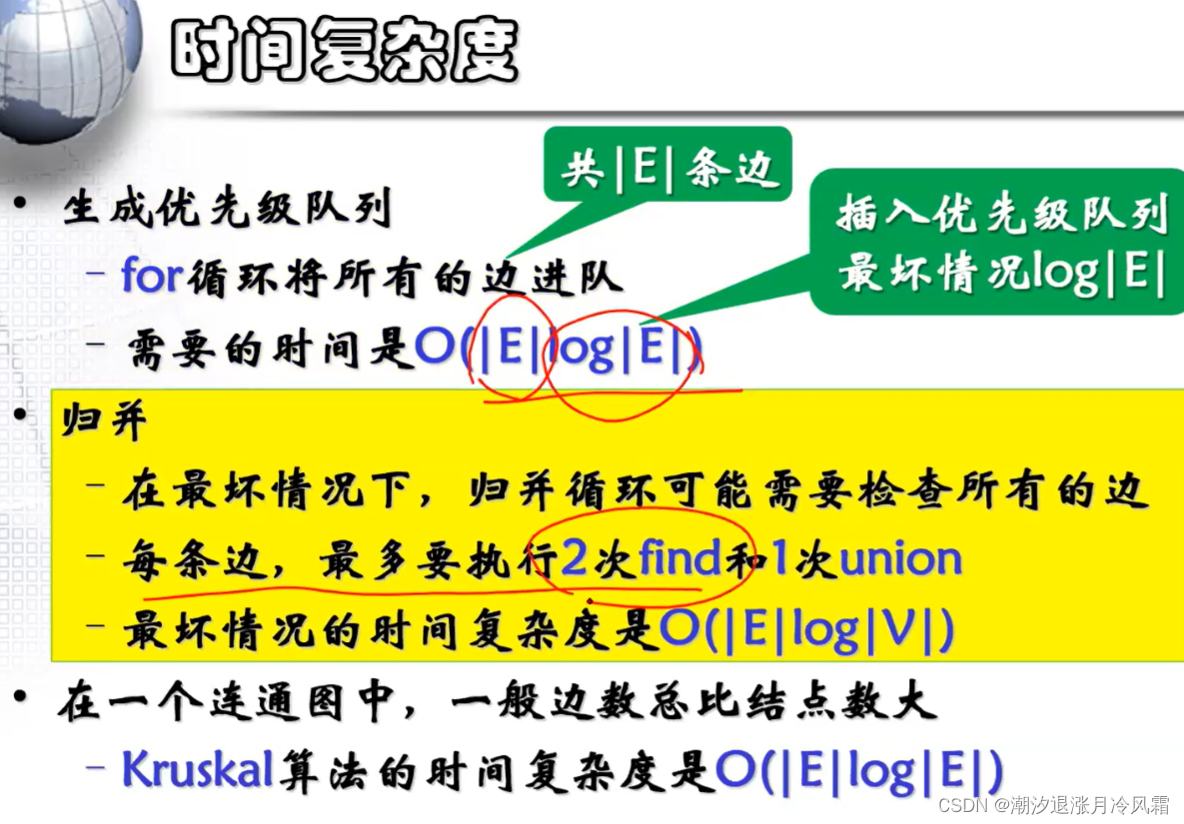
①Kruskal算法
[选择边][优先级队列+并查集]
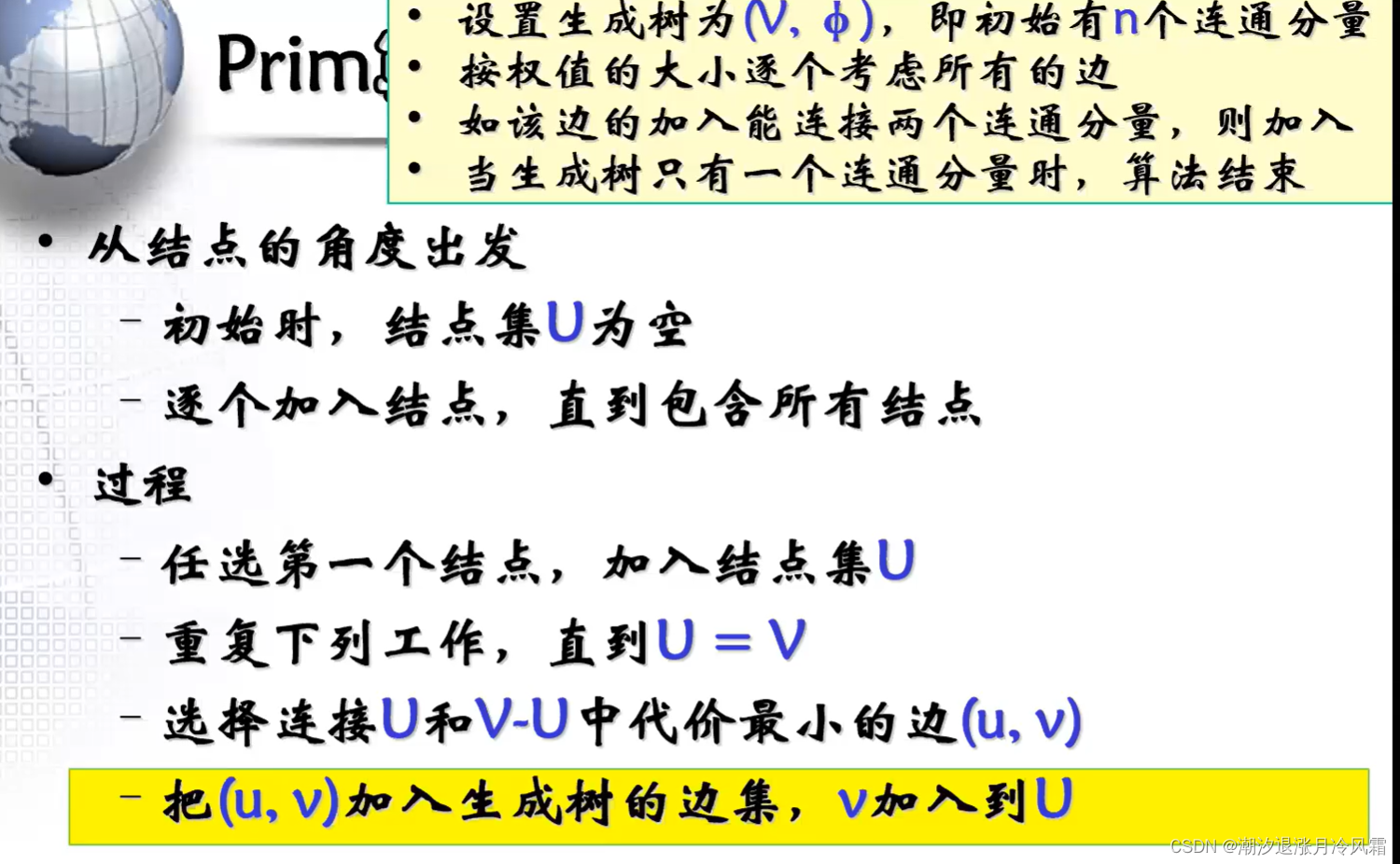
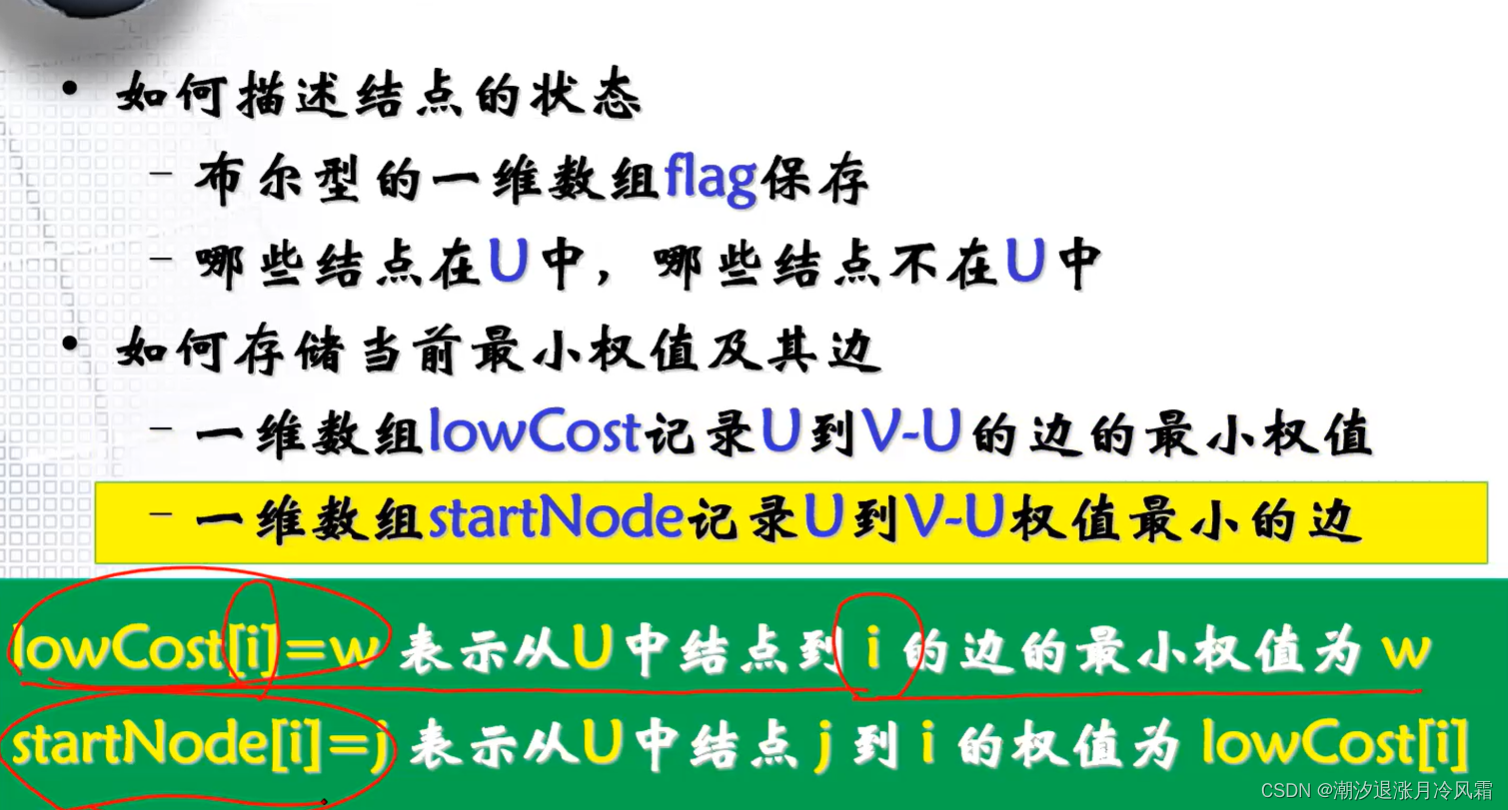
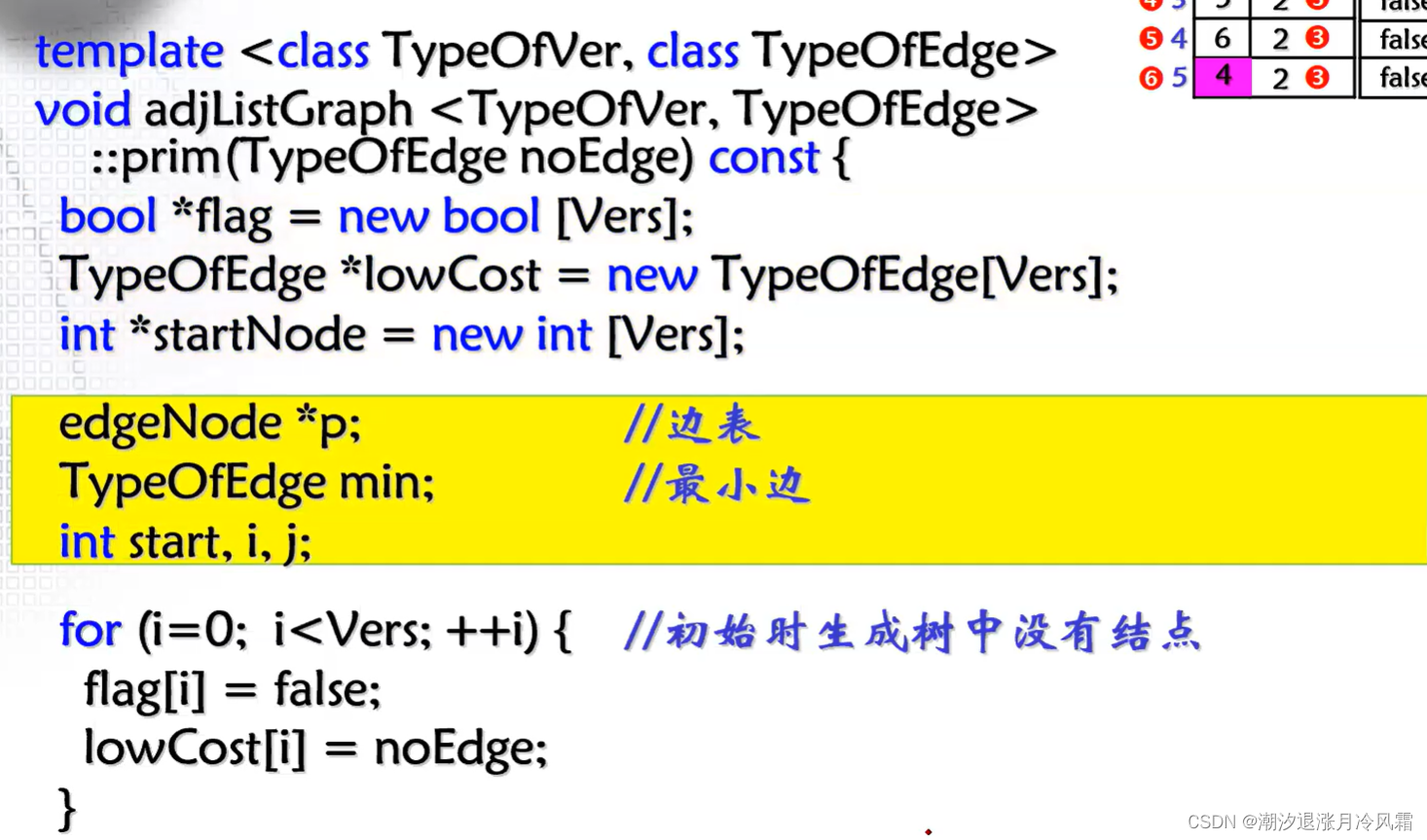
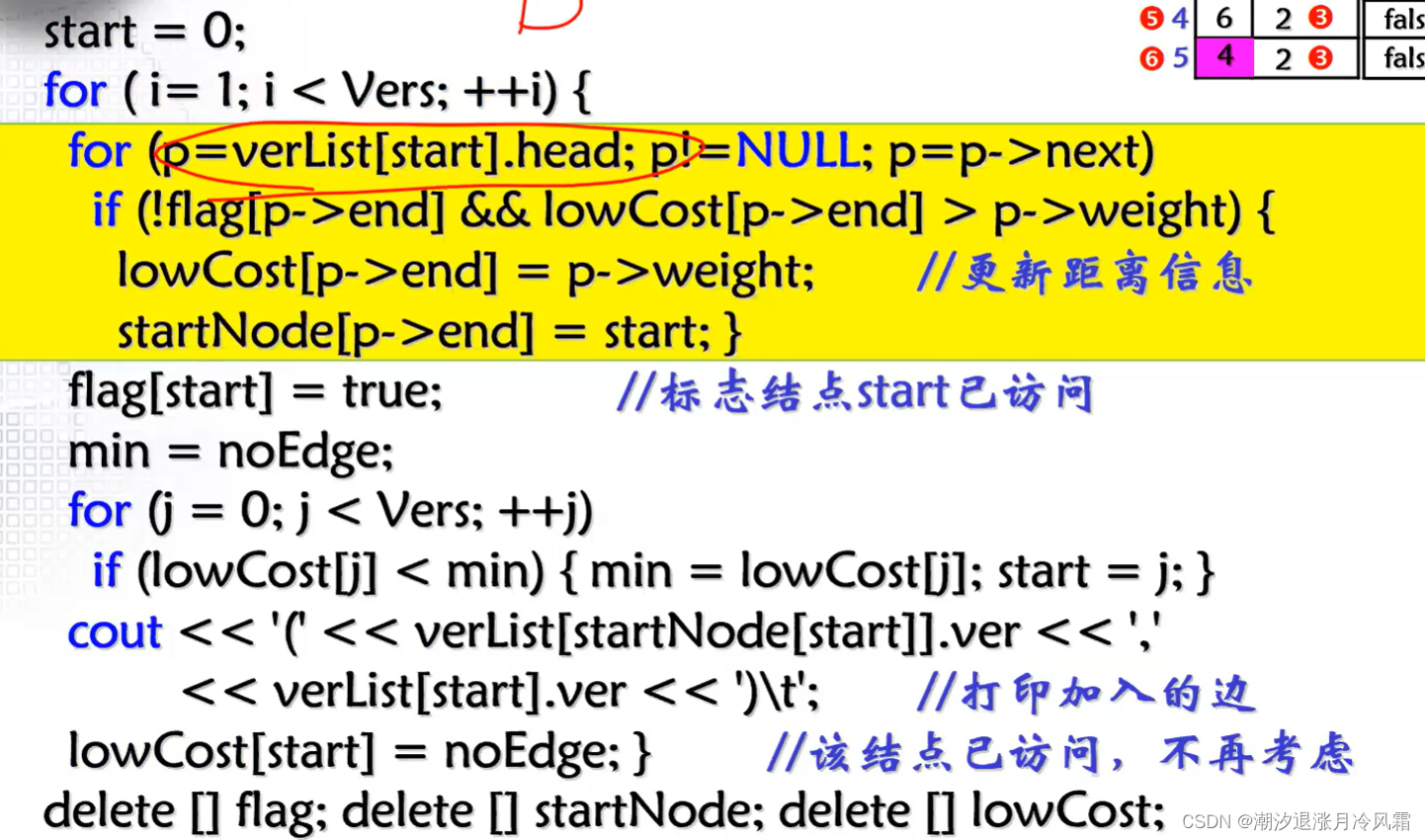
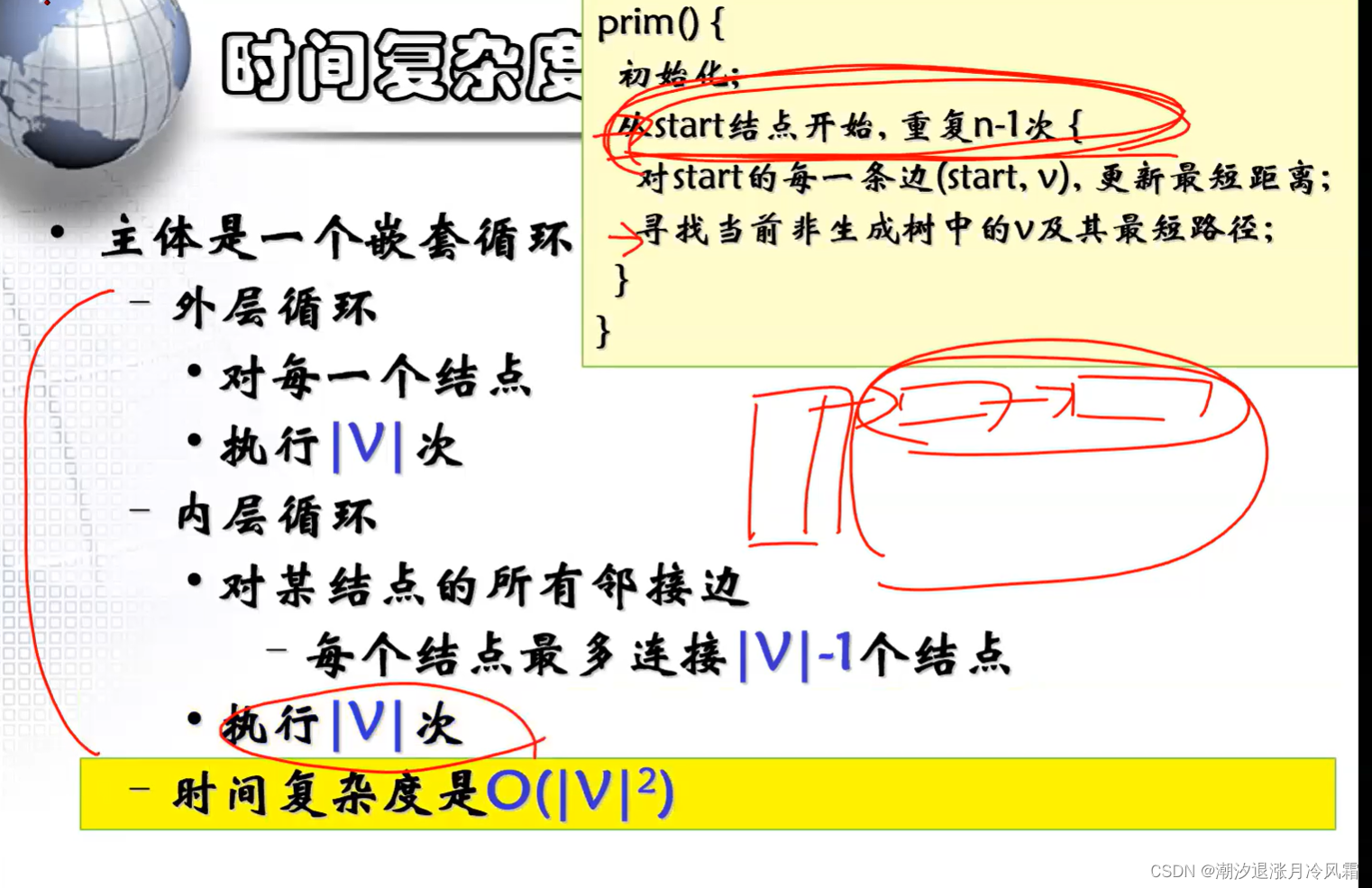
②Prim算法
[选择点]
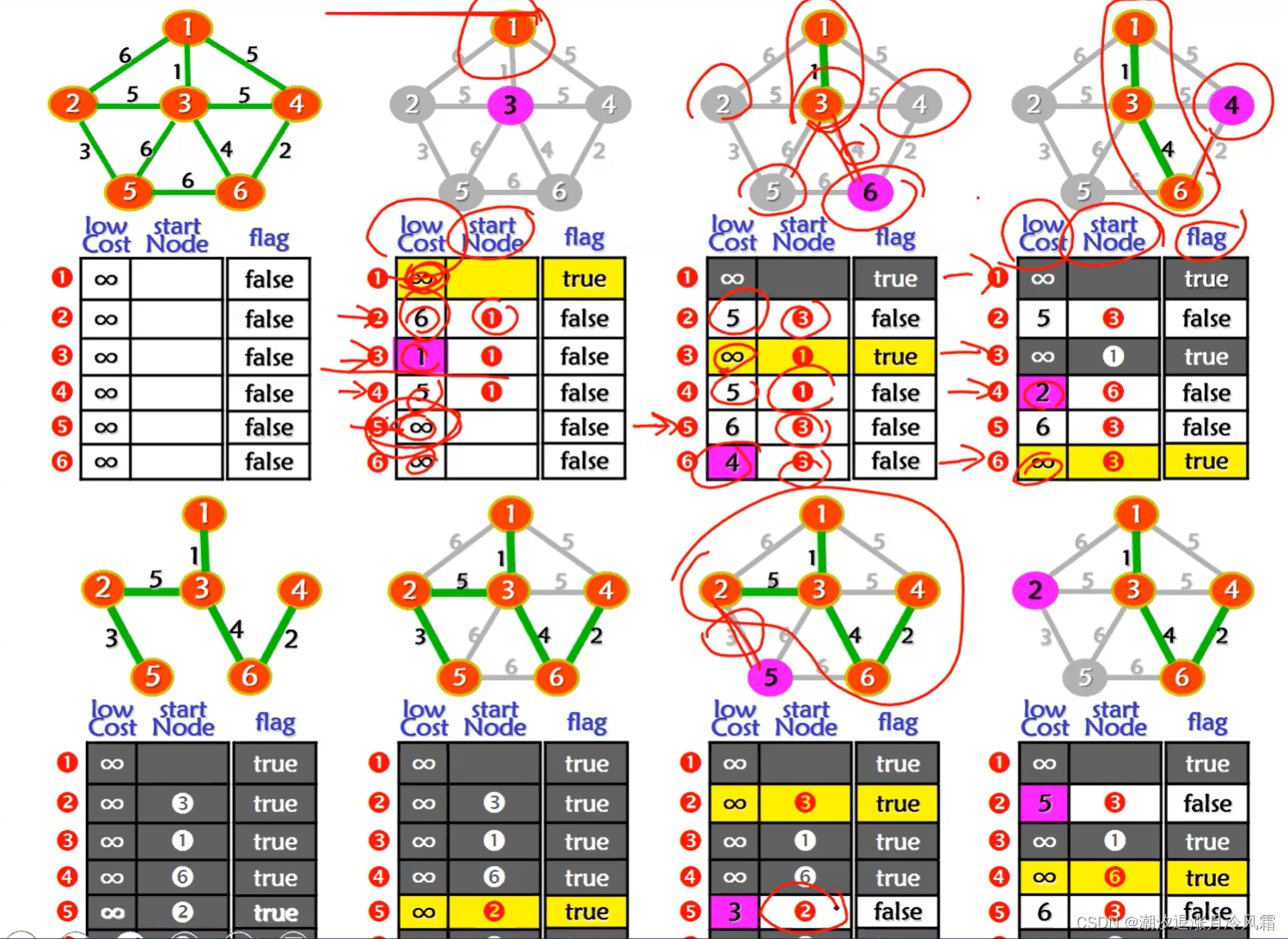
最小生成树不一定唯一,当所有边的权值不同时,最小生成树唯一。
6、最短路径