玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(案例实战)
**
玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(案例实战)
**
目录
- 玩转Matlab-Simscape(初级)- 08 - 基于Solidworks、Matlab Simulink、COMSOL的协同仿真(案例实战)
- 前言
- 一、 倒立摆案例简介
- 二、模型定义
- 三、COMSOL Multiphysics with Simulink协同仿真工作流
- 3.1 工作流概述
- 结果与讨论
- 总结
前言
学完《玩转Matlab-Simscape(初级)》系列博客的前三节 ,我发现应用Maltab simscape对多体进行仿真时,如果要研究一个刚体系统的动力学的行为,在Matlab Simscape中还是相对好处理的,但如果3D模型再复杂些,研究的结构中个别组件为柔性体(即对一个复杂刚柔耦合系统的控制进行仿真),或者想要了解系统组件中某个特殊位置的状态,在Matlab Simscape中进行分析,现阶段对我来说貌似有些困难,所以,今天我跳转介绍下COMSOL Multiphysics with Simulink。该部分主要想解决后续可能遇到的复杂3D刚柔耦合控制系统的仿真问题。
本文借助一个倒立摆控制案例学习SW &Matlab Simulink &COMSOL进行协同仿真的整个操作流程。
欢迎各位小伙伴关注、赞赞、留言和收藏。
(Matlab的这种刚柔耦合控制仿真分析模块我还没学习到,待掌握了解后跟此文方法会做个对比研究。😄)
一、 倒立摆案例简介
倒立摆是一种安装在枢轴上的结构,其重心的位置位于枢轴点之上。处于原始位置的结构是不稳定的,如果没有外力,它总是倾向于下落。这是控制系统工程中的一个经典问题——通过在小车上施加外部载荷来保持结构的平衡。控制负荷取决于钟摆的倾斜角、小车的位置和小车的速度。当所有控制参数为零时,假设平衡。
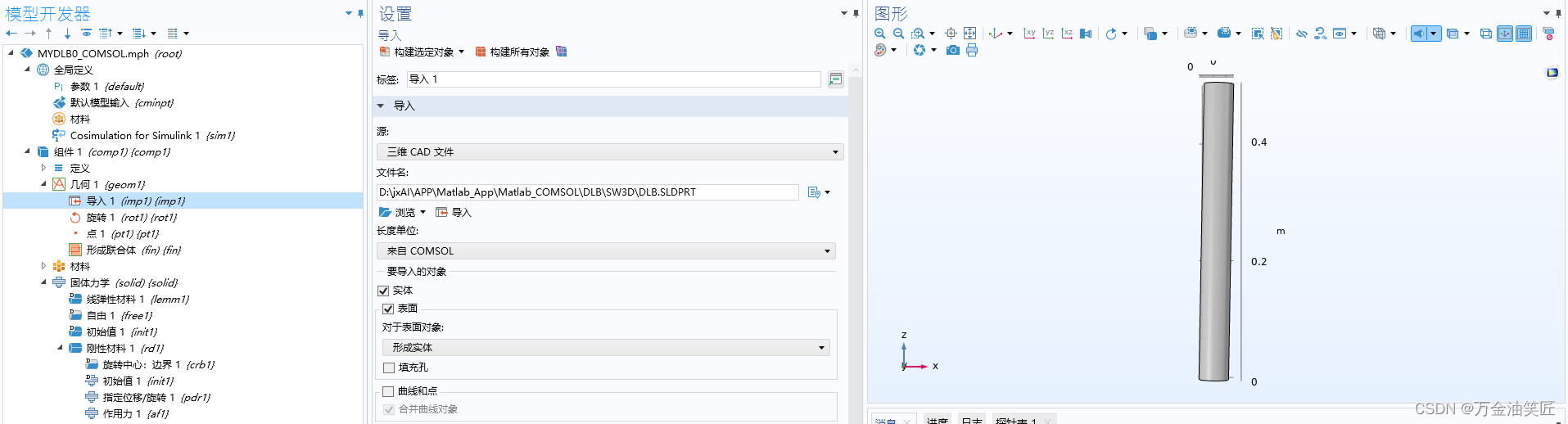
二、模型定义
摆系统由一根50厘米× 0.5厘米× 0.5厘米的杆和一辆2公斤重的小车组成。杆枢枢安装在小车上,最后一根可自由水平移动。在COMSOL Multiphysics中,杆由SW软件建模,并作为刚性域,而车仅用其质量表示。
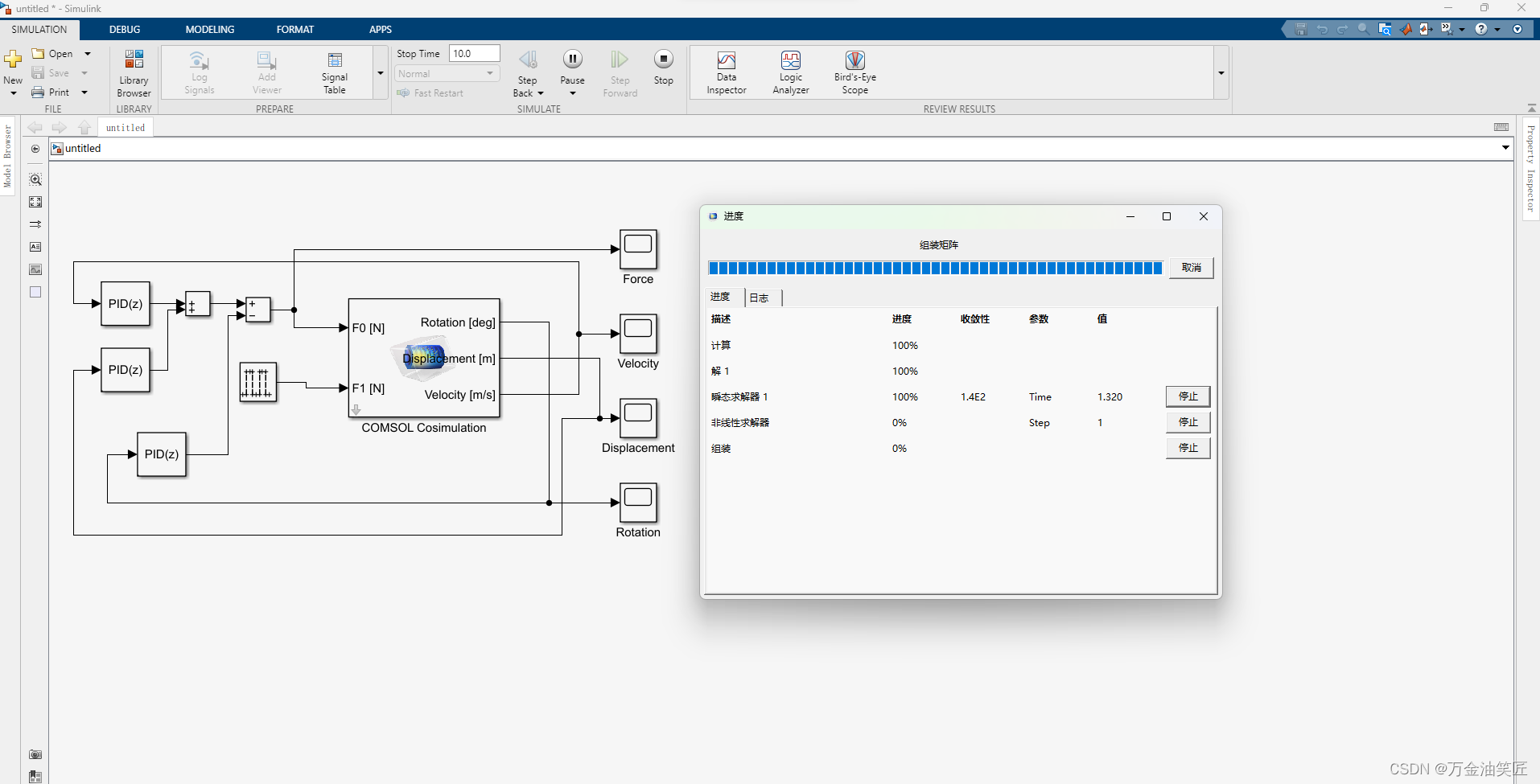
控制系统在Simulink中使用三个PID控制器来实现,这些控制器提供施加到小车上的力,以保持摆锤的平衡。当倾斜角、小车位置和小车速度为零时,认为摆杆处于平衡状态。这些是PID控制器使用的COMSOL仿真返回的值。
通过从COMSOL模型中导出COMSOL cosimulation文件,然后将该文件添加到Simulink仿真图中的COMSOL cosimulation块中,可以建立与COMSOL Multiphysics和Simulink的联合仿真。块的输入由Simulink提供的摄动力和控制力组成。该块有三个输出:杆的倾斜旋转、位移和小车的速度。
杆以1度的初始倾斜角下落,并以0.2 s的振幅为0.2 N的脉冲施加摄动力。
三、COMSOL Multiphysics with Simulink协同仿真工作流
3.1 工作流概述
- 建立COMSOL模型,确保研究运行。仅支持具有单个Stationary或Time Dependent研究步骤的研究进行联合模拟。
- 保存COMSOL模型。这一步很重要,因为在Simulink中加载联合仿真文件需要模型的名称。
- 将Cosimulation for Simulink特性节点添加到COMSOL模型中。使用它来定义cosimulation的输入、输出和研究。
- 在“Cosimulation for Simulink”特性节点,导出Cosimulation文件。任何位置都可以,但最好将此文件导出到保存mph文件的位置。
- 在Simulink中创建或加载仿真图,并添加COMSOL Cosimulation模块。
- 双 击 COMSOL Cosimulation 模 块 , 输 入 COMSOL Multiphysics 导 出 的Cosimulation文件名称。
- 运行仿真、 分析结果
在matlab命令窗输入:mphlaunch这将启动一个COMSOL桌面,其中包含用于运行联合仿真的模型。在COMSOL软件里可以纵情的进行各种后处理!
结果与讨论
控制前后杆上某一点的运动轨迹

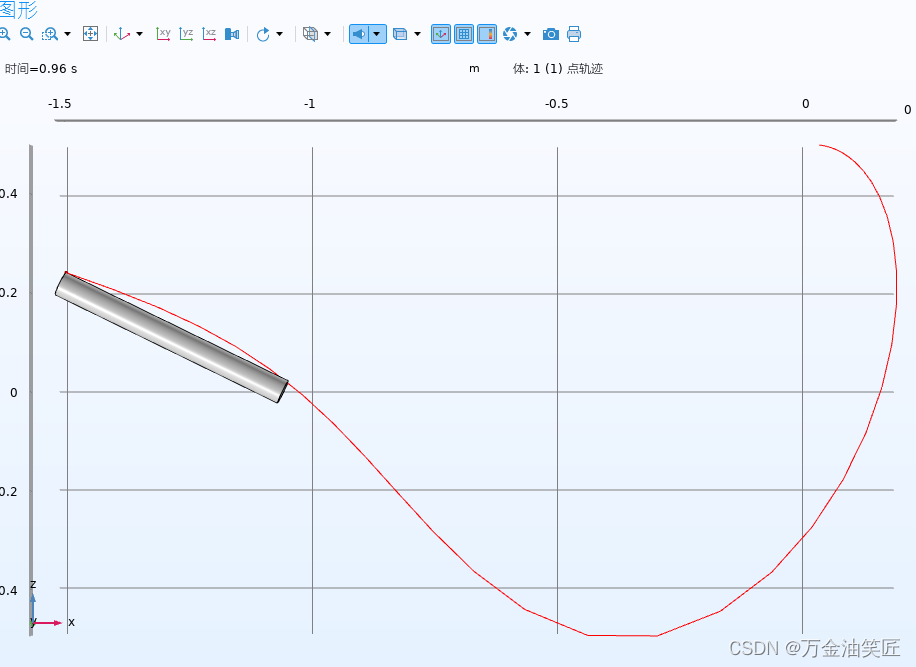

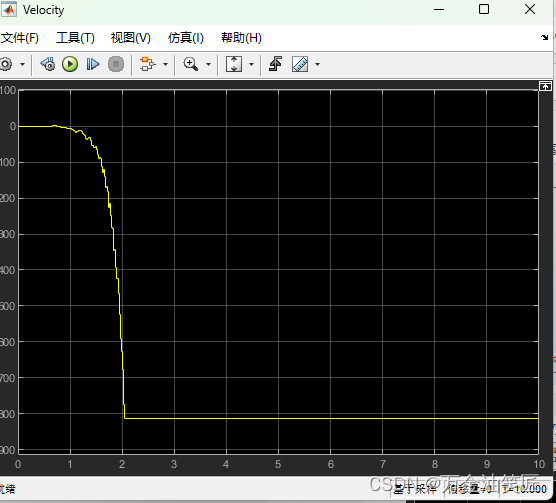
由于控制器的参数没有调整好,可以看到输出并没有得到稳定控制。😅,整体的仿真工作中流程跑通了,后边就慢慢设计控制模块了。
总结
以上就是今天分享的关于COMSOL Multiphysics with Simulink 的案例实践部分,简单分享了应用SW、COMSOL 、 Simulink进行控制仿真的实现流程。迎各位小伙伴关注、赞赞、留言和收藏。