ROS 2边学边练(45)-- 构建一个能动的机器人模型
前言
在上篇中我们搭建了一个机器人模型(其由各个关节(joint)和连杆(link)组成),此篇我们会通过设置关节类型来实现机器人的活动。
在ROS中,关节一般有无限旋转(continuous),有限旋转(revolute)和滑动(prismatic)三种类型,除了上述三种关节类型外,ROS还支持其他类型的关节,如planar(平面关节,允许在平面正交方向上平移或旋转)和floating(浮动关节,允许进行平移和旋转运动)等。这些关节类型提供了更复杂的运动学模型,以支持更广泛的机器人设计和应用。
动动手
同样是在urdf文件中实现。[原文件:06-flexible.urdf]
运行
按下面命令看看这个可活动的机器人效果如何。
$ros2 launch urdf_tutorial display.launch.py model:=urdf/06-flexible.urdf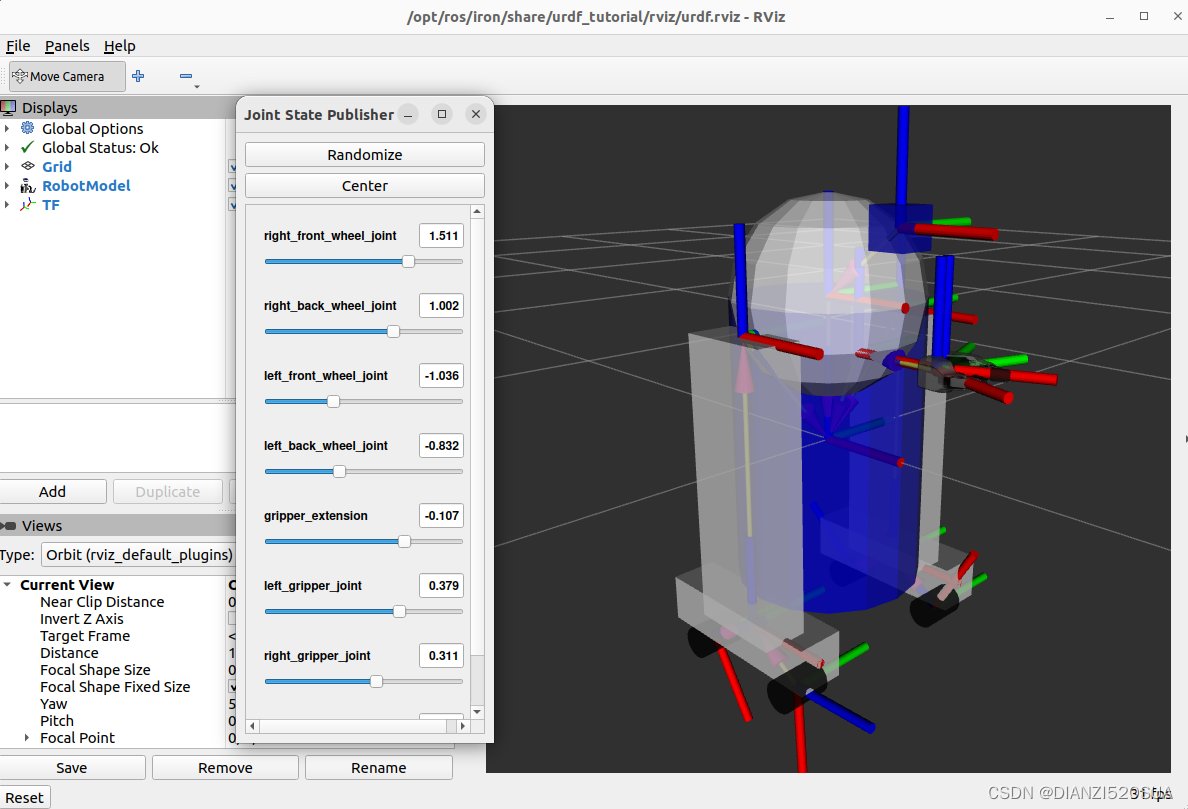
可以发现除了Rviz机器人模型出现外,还有另外一个小窗口也弹了出来(上一篇中也有,只不过内容很少),上面罗列了好几个关节(joint)的控制条,我们可以尝试拖动这些滑动条看看机器人如何活动。
关节
头
<joint name="head_swivel" type="continuous"><parent link="base_link"/><child link="head"/><axis xyz="0 0 1"/><origin xyz="0 0 0.3"/>
</joint>这里描述了头部关节的相关属性,该关节连接了机器人身体(base_link)和头部(head),类型为continuous,意味着可以无限制旋转(所有方向所有角度),受限于实际的物理限制,往往不能做到全方位全角度旋转,几个轮子关节的类型也是同样如此。需要注意的是我们从上面的代码中可以看到axis属性,这指定了旋转轴,(x, y, z)-> (0, 0, 1),该头部节点只能绕着z轴转动。
抓手
<joint name="left_gripper_joint" type="revolute"><axis xyz="0 0 1"/><limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/><origin rpy="0 0 0" xyz="0.2 0.01 0"/><parent link="gripper_pole"/><child link="left_gripper"/>
</joint>机器人的左右两只抓手关节类型都为revolute,有限制(角度)的旋转,通过limit属性我们指定了力矩(effort,单位Nm)、最小最大角度(lower/upper,单位弧度)、速度(velocity),实际过程中的值可能会与目标值不一致。
对于旋转关节(
revolute),effort通常表示的是力矩(torque),单位可能是牛顿·米(Nm)或磅·英尺(lb-ft),而不是牛顿(N)。牛顿(N)是力的单位,而力矩是力和力臂的乘积,用来描述力对物体绕某点旋转的效果。对于滑动关节(
prismatic),effort通常表示的是力(force),单位可能是牛顿(N)或磅(lb)。
抓臂
<joint name="gripper_extension" type="prismatic"><parent link="base_link"/><child link="gripper_pole"/><limit effort="1000.0" lower="-0.38" upper="0" velocity="0.5"/><origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>抓臂关节的类型设置成了prismatic,滑动,能起到让手臂伸缩的作用。对于滑动关节的属性lower和upper单位不再是弧度而是米。
其他
除了前面提到的关节类型,还有两种关节能够在空间中移动。其中,滑动关节(prismatic joint)只能沿一个维度移动,而平面关节(planar joint)则可以在一个平面,或者说两个维度上移动。此外,浮动关节(floating joint)是不受约束的,可以在三个维度中的任意一个维度上移动。这些关节不能仅用一个数值来指定,因此在本教程中不包括它们。
姿态控制原理(Rviz)
在我们拖动滑动条时,Rviz中的机器人关节也随着活动,并带动与其连接的其他组件运动,这是怎么实现的呢?
- GUI(控制窗口)解析urdf文件并确定各个活动关节及其限制;
- GUI读取滑动条数值并发布sensor_msgs/msg/JointState消息;
- 节点robot_state_publisher利用这些消息数据计算不同模块之间的位姿转换;
- Rviz最终通过转换树的信息数据进行显示转换后的机器人位姿。
后续的章节我们会添加一些物理属性到urdf中,并利用xacro(xml格式的宏)来精简我们的代码。
本篇完。