德国著名自动化公司Festo设计了一款仿生蜜蜂,仅重34g,支持多只蜜蜂编队飞行!...
德国著名的气动元件研发及自动化解决方案供应商Festo公司近日展示了一款仿生蜜蜂(BionicBee),重量只有34g,却完全可以实现自主飞行,还支持多只相同的蜜蜂机器人编队飞行。
BionicBee 重约 34 克,长 22 厘米,翼展 24 厘米,目前是仿生学习网络中最小巧的飞行器。
在研发过程中,开发人员首次采用了衍生式设计方法:只需输入少量参数,软件就会基于定义的结构设计,设计出最佳结构,从而以最少的材料实现尽可能稳定的构造。这种一致的轻量化设计,其对于实现出色的机动性和飞行时间至关重要。
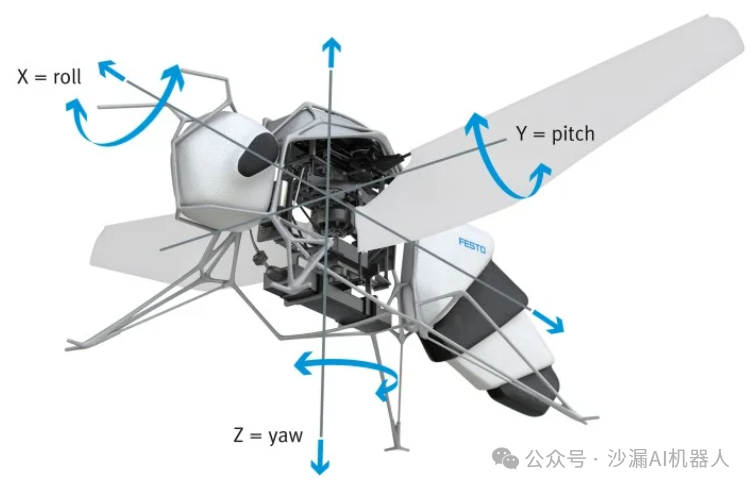
这种“蜜蜂”的内部构造非常紧凑,集成有翅膀扇动机构、通讯技术组件和控制组件,用于扇动翅膀和调节翅膀的几何形状。研发团队采用了可能节省空间的构造方式,其中安装有一个无刷电机、三个伺服电机、电池、减速机和各种电路板。电机与机械装置可实现智能协同作用,从而精确地调节翅膀扇动频率,完成不同动作。
Festo公司在飞行相关的仿生机器人研发方面已经坚持了15年,并构建了自己的仿生学习网络大框架,研究了大量飞行动物及其自然原理,获得了很多技术成果,包括:仿生蝴蝶、仿生蝙蝠、仿生蜻蜓、仿生鸽子等等。
但是,以前发布的飞行仿真机器人都是单体飞行,也就是只能独立飞行,而不会与自己的“同伴”进行交互和合作,这次他们还特意研究了自主集体编队飞行。

这些蜜蜂之所以能够自主行动,是因为采用了超宽带技术 (UWB) 的室内定位系统。为了搭建该系统,团队在室内分两层安装了八个 UWB 锚点。这样就可以精确地测量运行时间,并且蜜蜂能够确定自身在该空间内的位置。UWB 锚点向各个蜜蜂发送信号,而这些蜜蜂则会独立测量与相应发射元件的距离,并且可利用时间戳计算出自身在空间内的位置。
Festo公司曾经开发的其他仿生机器人分别如下:
仿生蝴蝶:
仿生蜻蜓:
仿生蝙蝠:
仿生鸽子:
仿生软体手:
仿生象鼻机器人(软体机械臂):
15年来,Festo公司的研究团队一直在观察大自然,从中推导出技术基本原理,然后在此基础上研究能够最大化模拟各类动物(尤其是飞行类动物和昆虫)的仿生机器人,并力求在机器人的轻量化、能耗、外观方面都能做到极致。