【已开源】基于stm32f103的爬墙小车
基于stm32f103的遥控器无线控制爬墙小车,实现功能为可平衡在竖直墙面上,并进行移动和转向,具有超声波防撞功能。
直接上:

演示视频如:哔哩哔哩】 https://b23.tv/BzVTymO
项目说明:
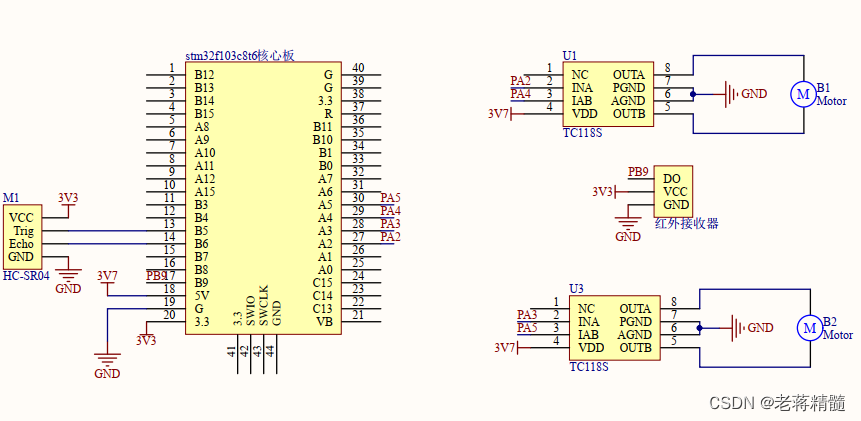
在这个项目中,我们将利用STM32F103单片机来制作一个能够在竖直墙面上移动、转向并保持平衡的爬墙小车。该小车装备了超声波传感器HC-SR04用于避障,以及两个电机和相应的驱动电路TC118S来控制小车的运动。以下是项目的详细步骤。
硬件清单
- STM32F103开发板
- TC118S电机驱动模块
- 两个直流减速电机(带齿轮箱)
- HC-SR04超声波距离传感器
- 电池(建议使用锂聚合物电池)
- 电机支架和轮子
- 螺丝、螺母、焊接材料等安装配件
电路设计
-
STM32F103与电机驱动模块连接:
- 将STM32F103的PWM输出引脚连接到TC118S的IN1和IN2控制电机的转动。
- 连接STM32F103的GND到TC118S和电机的公共接地点。
- 将电机电源线连接到电池,并将电池正极连接到TC118S的VCC,负极连接到GND。
-
超声波传感器HC-SR04连接:
- HC-SR04的VCC接到STM32F103的3.3V或5V输出(根据模块要求)。
- TRIG引脚接到STM32F103的一个GPIO输出。
- ECHO引脚接到STM32F103的一个GPIO输入。
- 将超声波传感器的GND接到STM32F103的GND。
-
电源管理:
- 确保电池电压适合STM32F103和TC118S模块。
- 可能需要添加电压调节电路,如果电池电压高于模块要求。
软件设计
-
初始化代码:
- 配置STM32F103的时钟、GPIO、PWM和外部中断。
- 初始化超声波传感器HC-SR04。
-
主程序循环:
- 不断读取超声波传感器的数据以检测障碍物。
- 根据传感器数据和预设的逻辑调整电机的速度和方向,以维持平衡和避障。
- 通过PID控制算法调节电机速度,以实现稳定的墙面爬行。
-
PID控制算法:
- 设计合适的PID控制器来调整电机速度,保持小车的平衡和响应方向变化。
- 根据传感器反馈和小车状态调整PID参数。
-
超声波防撞功能:
- 当超声波传感器检测到前方有障碍物时,发送指令给电机驱动模块,使小车停止或改变方向。
-
调试与优化:
- 通过串口打印调试信息,观察小车的行为和传感器数据。
- 根据测试结果调整PID参数,优化小车的性能。
注意事项
- 确保所有连接都牢固可靠。
- 在初次测试时,应在安全环境下操作。
- PID参数需要根据实际情况进行调整,可能需要多次尝试才能达到最佳效果。
完成以上步骤后,你就能得到一个能够在竖直墙面上移动、转向并保持平衡的爬墙小车。记得在实际使用前进行充分的测试和调整,确保小车的稳定性和可靠性。
主要程序:
#include "Systick.h"
#include "USART.h"
#include "IR.h"
#include "Timer.h"
#include "UltrasonicWave.h"int main()
{Systick_Init(72);SCB->AIRCR=0x05fa0500;NVIC->ISER[1]|=1<<5;NVIC->IP[37]=0x00;IR_Init();Timer2_Init();Timer4_Init();UW_GPIO_Init();while(1){if(safety > 500){switch(IR_R){case 0x43://startTIM2->CCR3=3500;//右TIM2->CCR4=3500; //左 break;case 0x09://EQTIM2->CCR3=0;TIM2->CCR4=0;break;case 0x08://4TIM2->CCR3=3500;TIM2->CCR4=0;break;case 0x5a://6TIM2->CCR3=0;TIM2->CCR4=3500;break;}//switch
// if(IR_R == 0x43)
// {
// TIM2->CCR3=25000;//右
// TIM2->CCR4=20000; //左
// }
// else if(IR_R == 0x09)
// {
// TIM2->CCR3=0;
// TIM2->CCR4=0;
// }
// else if(IR_R == 0x08)
// {
// TIM2->CCR3=20000;
// TIM2->CCR4=15000;
// }
// else if(IR_R == 0x5a)
// {
// TIM2->CCR3=15000;
// TIM2->CCR4=20000;
// }}else{TIM2->CCR3=0;TIM2->CCR4=0;}UW_Start(&safety);}
}资料获取,公众【一起来学习哟】回复‘爬墙小车’获取完整资料