ros rosbag使用记录
rosbag:
- 1. `rosbag record -a` 记录当前所有消息(较少用)
- 2. rosbag record -O bag_name.bag /topic 记录指定消息
- 3. rosbag info 查阅bag文件信息
- 4. rosbag play 播放bag文件内容
- 5. python script 查看bag文件内容
- 参考:
1. rosbag record -a 记录当前所有消息(较少用)
文件格式为 YYYY-MM-DD-HH-mm-ss.bag 该时间为 rosbag 开始记录的时间
2. rosbag record -O bag_name.bag /topic 记录指定消息
-o 或 -O 指定bag文件名
rosbag record -O record.bag /joint_states
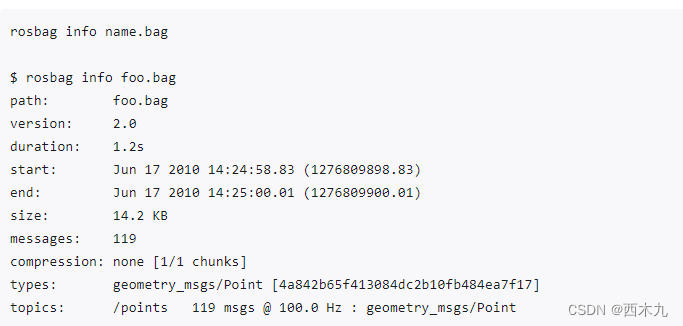
3. rosbag info 查阅bag文件信息
用 命令行 查看
rosbag info record.bag
4. rosbag play 播放bag文件内容
rosbag play --clock record.bag
--clock 表示需要 rosbag 发布时间消息,该时间从rosbag记录的时刻开始。
建议使用该命令时,关闭所有正在运行的仿真工具,包括gazebo,rviz等。
rosbag play record.bag直接用也行
5. python script 查看bag文件内容
#!/usr/bin/env python
# -*- coding: UTF-8 -*-
import rosbag
bagfile = "record.bag"bag = rosbag.Bag(bagfile, "r")
info = bag.get_type_and_topic_info()print(info)
参考:
[1]: rosbag 官方说明
[2]: 详细解说