[C++]使用OpenCV去除面积较小的连通域
这是后期补充的部分,和前期的代码不太一样
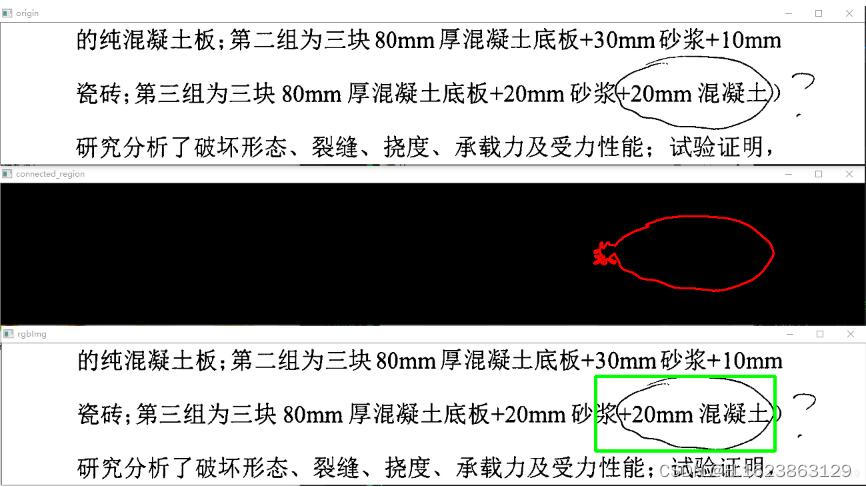
效果图
源代码
//测试
void CCutImageVS2013Dlg::OnBnClickedTestButton1()
{vector<vector<Point> > contours; //轮廓数组vector<Point2d> centers; //轮廓质心坐标 vector<vector<Point> >::iterator itr; //轮廓迭代器vector<Point2d>::iterator itrc; //质心坐标迭代器vector<vector<Point> > con; //当前轮廓double area;double minarea = 1000;double maxarea = 0;Moments mom; // 轮廓矩Mat image, gray, edge, dst;image = imread("D:\\66.png");cvtColor(image, gray, COLOR_BGR2GRAY);Mat rgbImg(gray.size(), CV_8UC3); //创建三通道图blur(gray, edge, Size(3, 3)); //模糊去噪threshold(edge, edge, 200, 255, THRESH_BINARY_INV); //二值化处理,黑底白字//--------去除较小轮廓,并寻找最大轮廓--------------------------findContours(edge, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); //寻找轮廓itr = contours.begin(); //使用迭代器去除噪声轮廓while (itr != contours.end()){area = contourArea(*itr); //获得轮廓面积if (area<minarea) //删除较小面积的轮廓 {itr = contours.erase(itr); //itr一旦erase,需要重新赋值}else{itr++;}if (area>maxarea) //寻找最大轮廓{maxarea = area;}}dst = Mat::zeros(image.rows, image.cols, CV_8UC3);/*绘制连通区域轮廓,计算质心坐标*/Point2d center;itr = contours.begin();while (itr != contours.end()){area = contourArea(*itr); con.push_back(*itr); //获取当前轮廓if (area == maxarea){vector<Rect> boundRect(1); //定义外接矩形集合boundRect[0] = boundingRect(Mat(*itr));cvtColor(gray, rgbImg, COLOR_GRAY2BGR);Rect select;select.x = boundRect[0].x;select.y = boundRect[0].y;select.width = boundRect[0].width;select.height = boundRect[0].height;rectangle(rgbImg, select, Scalar(0, 255, 0), 3, 2); //用矩形画矩形窗drawContours(dst, con, -1, Scalar(0, 0, 255), 2); //最大面积红色绘制}elsedrawContours(dst, con, -1, Scalar(255, 0, 0), 2); //其它面积蓝色绘制con.pop_back();//计算质心mom = moments(*itr);center.x = (int)(mom.m10 / mom.m00);center.y = (int)(mom.m01 / mom.m00);centers.push_back(center);itr++;}imshow("rgbImg", rgbImg);//imshow("gray", gray);//imshow("edge", edge);imshow("origin", image);imshow("connected_region", dst);waitKey(0);return;
}
前期做的,方法可能不太一样
一,先看效果图
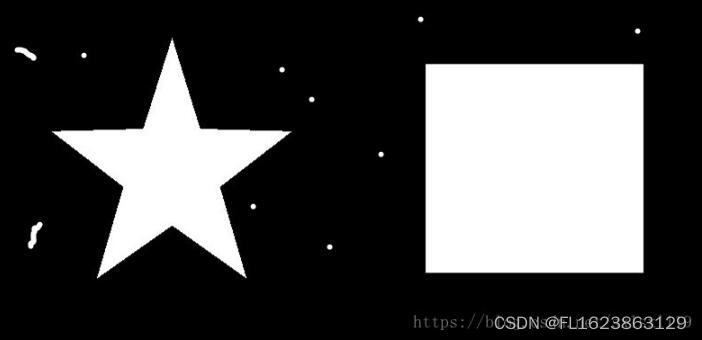
原图
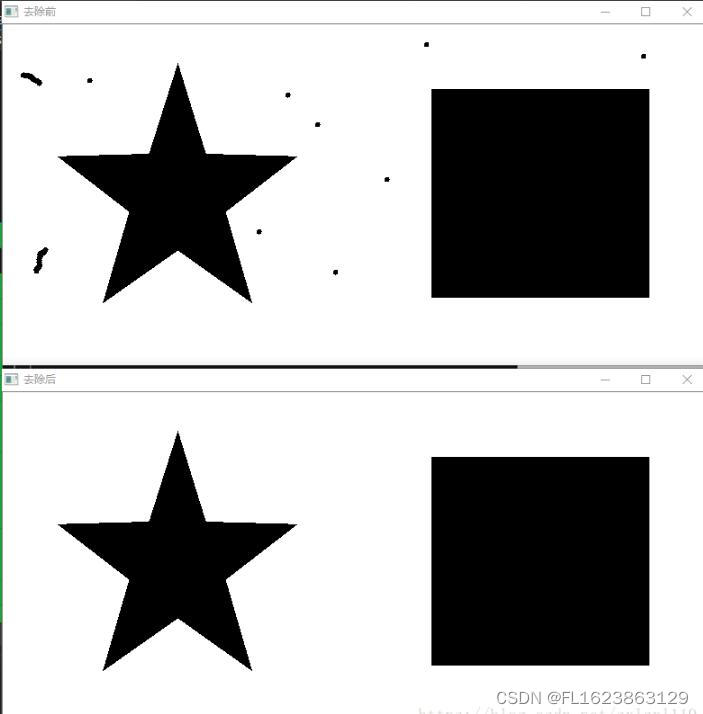
处理前后图
二,实现源代码
//=======函数实现=====================================================================
void RemoveSmallRegion(Mat &Src, Mat &Dst, int AreaLimit, int CheckMode, int NeihborMode)
{int RemoveCount = 0;//新建一幅标签图像初始化为0像素点,为了记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查 //初始化的图像全部为0,未检查 Mat PointLabel = Mat::zeros(Src.size(), CV_8UC1);if (CheckMode == 1)//去除小连通区域的白色点 {//cout << "去除小连通域.";for (int i = 0; i < Src.rows; i++){for (int j = 0; j < Src.cols; j++){if (Src.at<uchar>(i, j) < 10){PointLabel.at<uchar>(i, j) = 3;//将背景黑色点标记为合格,像素为3 }}}}else//去除孔洞,黑色点像素 {//cout << "去除孔洞";for (int i = 0; i < Src.rows; i++){for (int j = 0; j < Src.cols; j++){if (Src.at<uchar>(i, j) > 10){PointLabel.at<uchar>(i, j) = 3;//如果原图是白色区域,标记为合格,像素为3 }}}}vector<Point2i>NeihborPos;//将邻域压进容器 NeihborPos.push_back(Point2i(-1, 0));NeihborPos.push_back(Point2i(1, 0));NeihborPos.push_back(Point2i(0, -1));NeihborPos.push_back(Point2i(0, 1));if (NeihborMode == 1){//cout << "Neighbor mode: 8邻域." << endl;NeihborPos.push_back(Point2i(-1, -1));NeihborPos.push_back(Point2i(-1, 1));NeihborPos.push_back(Point2i(1, -1));NeihborPos.push_back(Point2i(1, 1));}else int a = 0;//cout << "Neighbor mode: 4邻域." << endl;int NeihborCount = 4 + 4 * NeihborMode;int CurrX = 0, CurrY = 0;//开始检测 for (int i = 0; i < Src.rows; i++){for (int j = 0; j < Src.cols; j++){if (PointLabel.at<uchar>(i, j) == 0)//标签图像像素点为0,表示还未检查的不合格点 { //开始检查 vector<Point2i>GrowBuffer;//记录检查像素点的个数 GrowBuffer.push_back(Point2i(j, i));PointLabel.at<uchar>(i, j) = 1;//标记为正在检查 int CheckResult = 0;for (int z = 0; z < GrowBuffer.size(); z++){for (int q = 0; q < NeihborCount; q++){CurrX = GrowBuffer.at(z).x + NeihborPos.at(q).x;CurrY = GrowBuffer.at(z).y + NeihborPos.at(q).y;if (CurrX >= 0 && CurrX<Src.cols&&CurrY >= 0 && CurrY<Src.rows) //防止越界 {if (PointLabel.at<uchar>(CurrY, CurrX) == 0){GrowBuffer.push_back(Point2i(CurrX, CurrY)); //邻域点加入buffer PointLabel.at<uchar>(CurrY, CurrX) = 1; //更新邻域点的检查标签,避免重复检查 }}}}if (GrowBuffer.size()>AreaLimit) //判断结果(是否超出限定的大小),1为未超出,2为超出 CheckResult = 2;else{CheckResult = 1;RemoveCount++;//记录有多少区域被去除 }for (int z = 0; z < GrowBuffer.size(); z++){CurrX = GrowBuffer.at(z).x;CurrY = GrowBuffer.at(z).y;PointLabel.at<uchar>(CurrY, CurrX) += CheckResult;//标记不合格的像素点,像素值为2 }//********结束该点处的检查********** }}}CheckMode = 255 * (1 - CheckMode);//开始反转面积过小的区域 for (int i = 0; i < Src.rows; ++i){for (int j = 0; j < Src.cols; ++j){if (PointLabel.at<uchar>(i, j) == 2){Dst.at<uchar>(i, j) = CheckMode;}else if (PointLabel.at<uchar>(i, j) == 3){Dst.at<uchar>(i, j) = Src.at<uchar>(i, j);}}}//cout << RemoveCount << " objects removed." << endl;
}
//=======函数实现=====================================================================
//=======调用函数=====================================================================Mat img;img = imread("D:\\1_1.jpg", 0);//读取图片threshold(img, img, 128, 255, CV_THRESH_BINARY_INV);imshow("去除前", img);Mat img1;RemoveSmallRegion(img, img, 200, 0, 1);imshow("去除后", img);waitKey(0);
//=======调用函数=====================================================================