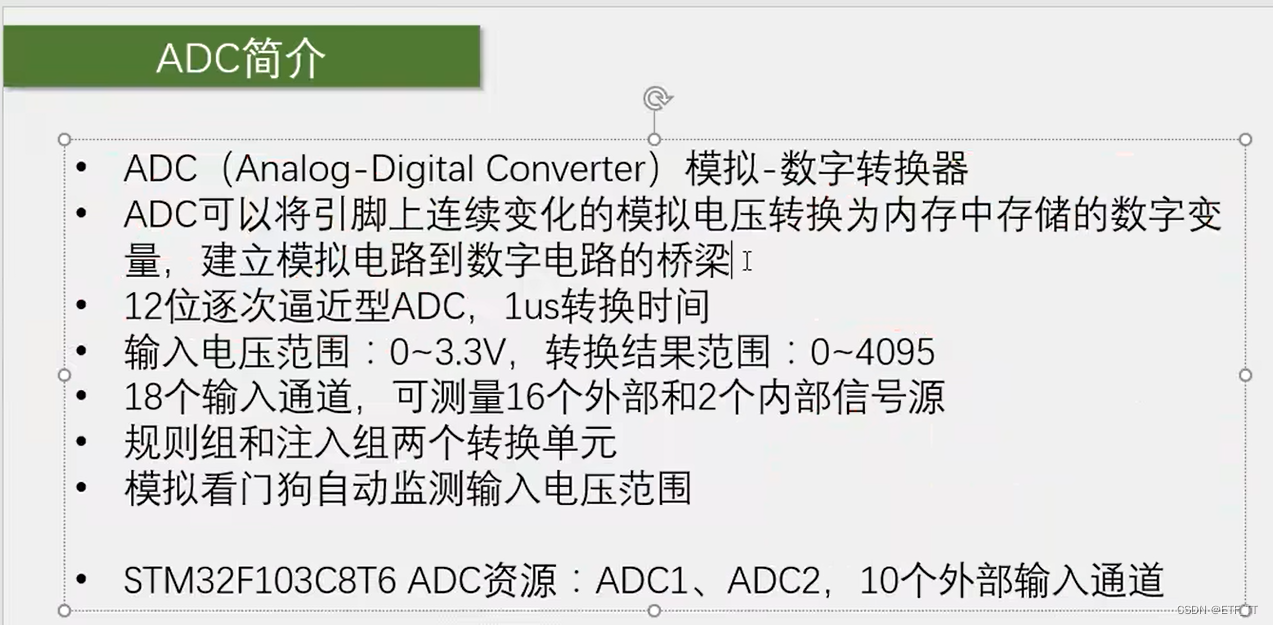
stm32-模拟数字转化器ADC








接线图:
#include "stm32f10x.h" // Device header//1: 开启RCC时钟,包括ADC和GPIO的时钟//2:配置GPIO将GPIO配置为模拟输入模式//3:配置多路开关将左边的通道接入到规则组中//4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描//5:开关控制调用ADC_COM参数ADC配置完成就能正常工作
void AD_Init(void){
// void RCC_ADCCLKConfig(uint32_t RCC_PCLK2); RCC_ADCCLKConfig配置ADCCLK分频器
// void ADC_DeInit(ADC_TypeDef* ADCx); 恢复缺省配置
// void ADC_Init(ADC_TypeDef* ADCx, ADC_InitTypeDef* ADC_InitStruct); Init初始化
// void ADC_StructInit(ADC_InitTypeDef* ADC_InitStruct); 结构体初始化
// void ADC_Cmd(ADC_TypeDef* ADCx, FunctionalState NewState); 给ADC上电
// void ADC_DMACmd(ADC_TypeDef* ADCx, FunctionalState NewState); 开始DMA输出信号
// void ADC_ITConfig(ADC_TypeDef* ADCx, uint16_t ADC_IT, FunctionalState NewState); // 中断输出控制
// void ADC_ResetCalibration(ADC_TypeDef* ADCx); 复位校准
// FlagStatus ADC_GetResetCalibrationStatus(ADC_TypeDef* ADCx);获取复位校准状态
// void ADC_StartCalibration(ADC_TypeDef* ADCx); 开始校准
// FlagStatus ADC_GetCalibrationStatus(ADC_TypeDef* ADCx); 获取开始校准状态
// void ADC_SoftwareStartConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState); ADC软件开始转换函数用于软件触发的函数
// FlagStatus ADC_GetSoftwareStartConvStatus(ADC_TypeDef* ADCx); ADC获取软件开始转换状态
// void ADC_DiscModeChannelCountConfig(ADC_TypeDef* ADCx, uint8_t Number); 配置间断模式每隔几个通道间断一次
// void ADC_DiscModeCmd(ADC_TypeDef* ADCx, FunctionalState NewState); 是否启用间断模式
// void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime); ADC规则组通道配置
// void ADC_ExternalTrigInjectedConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState); ADC外部触发转换控制是否允许外部触发转换
// uint16_t ADC_GetInjectedConversionValue(ADC_TypeDef* ADCx, uint8_t ADC_InjectedChannel); ADC获取外部触发转换值
// uint16_t ADC_GetConversionValue(ADC_TypeDef* ADCx); 获取ADC转换的数据寄存器,读取电平转换结果需要使用这个函数
// uint32_t ADC_GetDualModeConversionValue(void); ADC_获取双模式转换值,ADC双模式读取转换结果的函数
// 以下的三个函数是对模拟看门狗进行配置的函数:第一个是是否启动模拟看门狗,第二个是配置高低阈值,第三个是配置看门的通道
// void ADC_AnalogWatchdogCmd(ADC_TypeDef* ADCx, uint32_t ADC_AnalogWatchdog);
// void ADC_AnalogWatchdogThresholdsConfig(ADC_TypeDef* ADCx, uint16_t HighThreshold, uint16_t LowThreshold);
// void ADC_AnalogWatchdogSingleChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel);
// void ADC_TempSensorVrefintCmd(FunctionalState NewState); ADC温度传感器,内部参考电压控制
// 以下的4个函数:第一个是获取标志位状态,第二个是清除标志位,第三个获取中断状态,第四个清除中断挂起位
// FlagStatus ADC_GetFlagStatus(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
// void ADC_ClearFlag(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
// ITStatus ADC_GetITStatus(ADC_TypeDef* ADCx, uint16_t ADC_IT);
// void ADC_ClearITPendingBit(ADC_TypeDef* ADCx, uint16_t ADC_IT);}AD.C代码
#include "stm32f10x.h" // Device header// 1: 开启RCC时钟,包括ADC和GPIO的时钟// 2:配置GPIO将GPIO配置为模拟输入模式// 3:配置多路开关将左边的通道接入到规则组中// 4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描// 5:开关控制调用ADC_COM参数ADC配置完成就能正常工作void AD_Init(void){// 开启ADC的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);// 开启GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 配置ADC_CLK,72MHz/6 = 12MHzRCC_ADCCLKConfig(RCC_PCLK2_Div6);// 配置GPIOGPIO_InitTypeDef GPIO_InitStructre;// 将GPIO的模式引用出来GPIO_InitStructre.GPIO_Mode =GPIO_Mode_AIN; // 选择GPIO的模式,设置为AN模拟输入的模式在AIN模式下GPIO口是没有效果的GPIO_InitStructre.GPIO_Pin = GPIO_Pin_0; // 选择GPIO的输出模式,选择输出的管脚GPIO_InitStructre.GPIO_Speed = GPIO_Speed_50MHz; // 选择GPIO的时钟频率GPIO_Init(GPIOA,&GPIO_InitStructre); // 初始化GPIO// 第二步 ---》 选择规则组的输入通道,参数二:指定通道,参数三:规则组序列器里面的次序1-16之间,参数4:指定通道的采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5); // 第三步 ---> 使用结构体初始化ADCADC_InitTypeDef ADC_InitStructure;// 引出结构体成员ADC_InitStructure.ADC_ContinuousConvMode = DISABLE ; // 配置扫描的模式ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 配置ADC的数据对齐方式ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 配置ADC的外部触发转换选择:这里使用内部软件触发的方式ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; // 配置ADC的工作模式为独立模式ADC_InitStructure.ADC_NbrOfChannel = 1; // 配置通道数目ADC_InitStructure.ADC_ScanConvMode = DISABLE; // 配置扫描的模式ADC_Init(ADC1,&ADC_InitStructure);// 以下还可以配置中断和模拟看门狗,根据自己的需求进行配置// 开启ADC设置,第一个ENABLE第二个开启ADC的电源ADC_Cmd(ADC1,ENABLE); // 对ADC进行校准,这里分别有四个函数可以进行配置ADC_ResetCalibration(ADC1); // 复位校准while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 返回复位校准的状态ADC_StartCalibration(ADC1); // 启动校准while(ADC_GetCalibrationStatus(ADC1) == SET); // 获取校准后的状态 }
uint16_t AD_GetValue(void){// 1: 软件触发转换 2:等待触发完成也就是等待EOC标志位设置为1,3:读取ADC数据寄存器ADC_SoftwareStartConvCmd(ADC1,ENABLE); // 获取标志位状态共有5个参数,// 第一个参数AWD模拟看门狗标志位,// 第二个参数EOC规则组转换完成标志位,// 第三个参数JEOC注入组转换完成标志位,// 第四个参数:JSTRT:注入组开始转换标志位,// 第五个参数:STRT规则组开始转换标志位while(ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); // 这里添加一个while空循环实现一个等待的过程// 获取ADC的结果--->使用ADC获取转换值的方式return ADC_GetConversionValue(ADC1);
}AD.H代码
#ifndef __AD_H
#define __AD_Huint16_t AD_GetValue(void);
void AD_Init(void);#endif
main函数代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"uint16_t ADValue;
float Votage;
int main(void)
{// 初始化oledOLED_Init();AD_Init();OLED_ShowString(1,1,"ADVALUE!");OLED_ShowString(2,1,"Votage:0.00V");while (1){ADValue = AD_GetValue();Votage = (float)ADValue / 4095 * 3.3;OLED_ShowNum(1, 9, ADValue, 4); OLED_ShowNum(2, 9, Votage, 1); OLED_ShowNum(2, 11, (int)(Votage * 100) % 100, 1);Delay_ms(100);}
}
切换为连续转换模式需要修改的代码

ADC多通道实现
接线图:

#include "stm32f10x.h" // Device header// 1: 开启RCC时钟,包括ADC和GPIO的时钟// 2:配置GPIO将GPIO配置为模拟输入模式// 3:配置多路开关将左边的通道接入到规则组中// 4:配置ADC转换器,单次转换,连续转换,扫描还是非扫描// 5:开关控制调用ADC_COM参数ADC配置完成就能正常工作void AD_Init(void){// 开启ADC的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);// 开启GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);// 配置ADC_CLK,72MHz/6 = 12MHzRCC_ADCCLKConfig(RCC_PCLK2_Div6);// 配置GPIOGPIO_InitTypeDef GPIO_InitStructre;// 将GPIO的模式引用出来GPIO_InitStructre.GPIO_Mode =GPIO_Mode_AIN; // 选择GPIO的模式,设置为AN模拟输入的模式在AIN模式下GPIO口是没有效果的GPIO_InitStructre.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_2 | GPIO_Pin_3; // 选择GPIO的输出模式,选择输出的管脚GPIO_InitStructre.GPIO_Speed = GPIO_Speed_50MHz; // 选择GPIO的时钟频率GPIO_Init(GPIOA,&GPIO_InitStructre); // 初始化GPIO// 第三步 ---> 使用结构体初始化ADCADC_InitTypeDef ADC_InitStructure;// 引出结构体成员ADC_InitStructure.ADC_ContinuousConvMode = ENABLE ; // 配置扫描的模式ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; // 配置ADC的数据对齐方式ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 配置ADC的外部触发转换选择:这里使用内部软件触发的方式ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; // 配置ADC的工作模式为独立模式ADC_InitStructure.ADC_NbrOfChannel = 1; // 配置通道数目ADC_InitStructure.ADC_ScanConvMode = DISABLE; // 配置扫描的模式ADC_Init(ADC1,&ADC_InitStructure);// 以下还可以配置中断和模拟看门狗,根据自己的需求进行配置// 开启ADC设置,第一个ENABLE第二个开启ADC的电源ADC_Cmd(ADC1,ENABLE); // 对ADC进行校准,这里分别有四个函数可以进行配置ADC_ResetCalibration(ADC1); // 复位校准while(ADC_GetResetCalibrationStatus(ADC1) == SET); // 返回复位校准的状态ADC_StartCalibration(ADC1); // 启动校准while(ADC_GetCalibrationStatus(ADC1) == SET); // 获取校准后的状态 // 1: 软件触发转换 2:等待触发完成也就是等待EOC标志位设置为1,3:读取ADC数据寄存器ADC_SoftwareStartConvCmd(ADC1,ENABLE);}
uint16_t AD_GetValue(uint8_t ADC_Channel){// 第二步 ---》 选择规则组的输入通道,参数二:指定通道,参数三:规则组序列器里面的次序1-16之间,参数4:指定通道的采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); ADC_SoftwareStartConvCmd(ADC1,ENABLE);while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET);return ADC_GetConversionValue(ADC1);
}main函数部分代码编译和下载
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"uint16_t AD0,AD1,AD2,AD3;
float Votage;
int main(void)
{// 初始化oledOLED_Init();AD_Init();OLED_ShowString(1,1,"AD0:");OLED_ShowString(2,1,"AD1:");OLED_ShowString(3,1,"AD3:");OLED_ShowString(4,1,"AD4:");while (1){AD0 = AD_GetValue(ADC_Channel_0);AD1 = AD_GetValue(ADC_Channel_1);AD2 = AD_GetValue(ADC_Channel_2);AD3 = AD_GetValue(ADC_Channel_3);OLED_ShowNum(1, 5, AD0, 4);OLED_ShowNum(2, 5, AD1, 4);OLED_ShowNum(3, 5, AD2, 4);OLED_ShowNum(4, 5, AD3, 4);Delay_ms(100);}
}