opencv 傅里叶变换(低通滤波 + 高通滤波)
文章目录
- 1、傅里叶变换
- 2、通过numpy实现
- 3、高通滤波器
- 5、通过opencv实现傅里叶变换
- 6、低通滤波器
- 7、C++实现傅里叶变换
1、傅里叶变换
时域分析:以时间作为参照物,世间万物都是随着时间变化而变化,并且不会停止
频域分析:认为世间万物都是静止的,永恒不变的
通过以下制作饮料的过程可以很好的理解傅里叶变换。
1、从时域分析:就是六点零一放了1块冰糖,3颗红豆,2颗绿豆,4块西红柿,1杯纯净水,六点零二放了1块冰糖。。。。随着时间的变化一直在变化

2、从频域角度分析:不在是以时间为参照物了,而是这个事情的频率,1分钟放1块冰糖,2分钟放3粒红豆,3分钟放2粒绿豆,4分钟放4块西红柿,5分钟放1杯水。
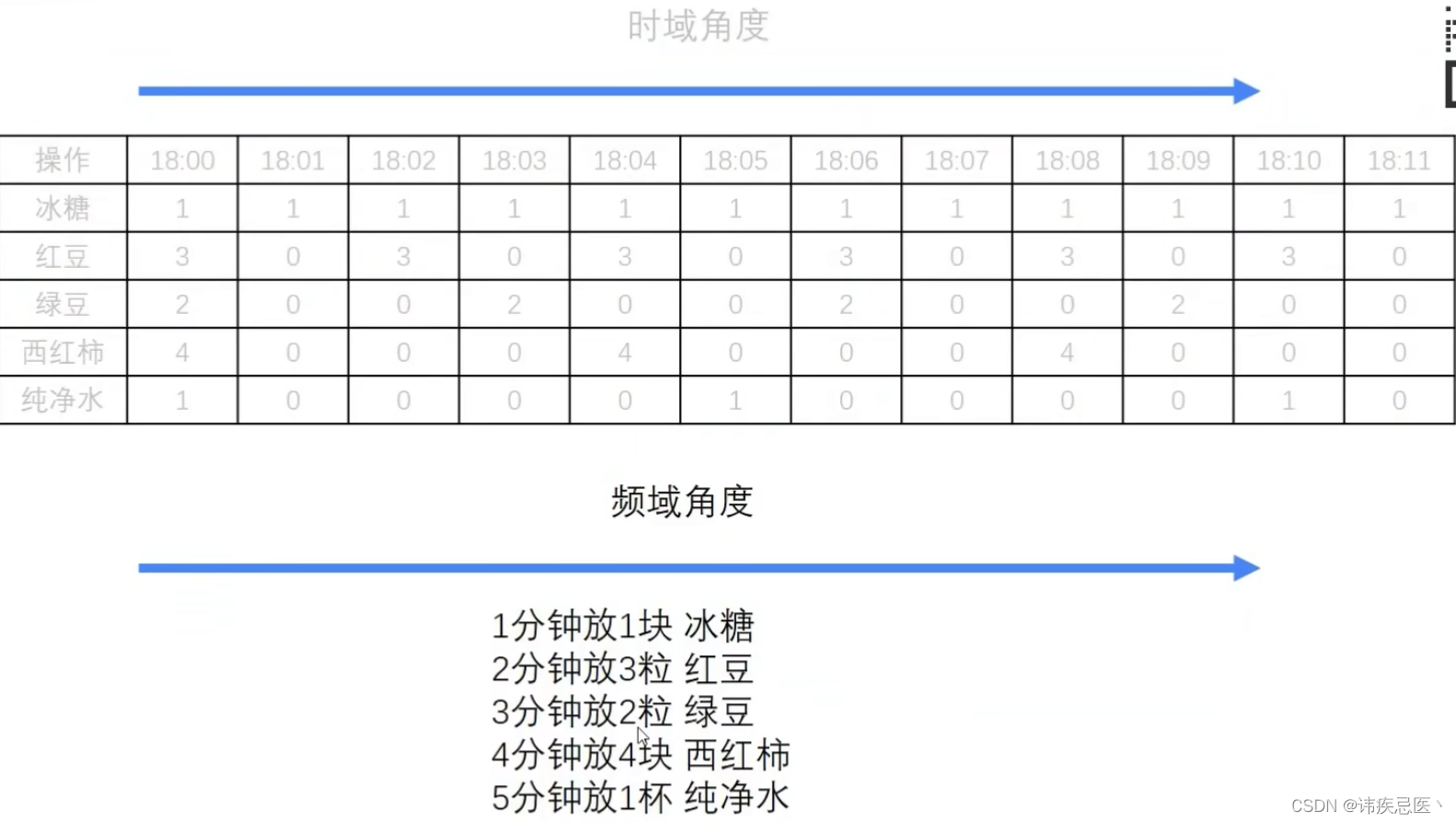
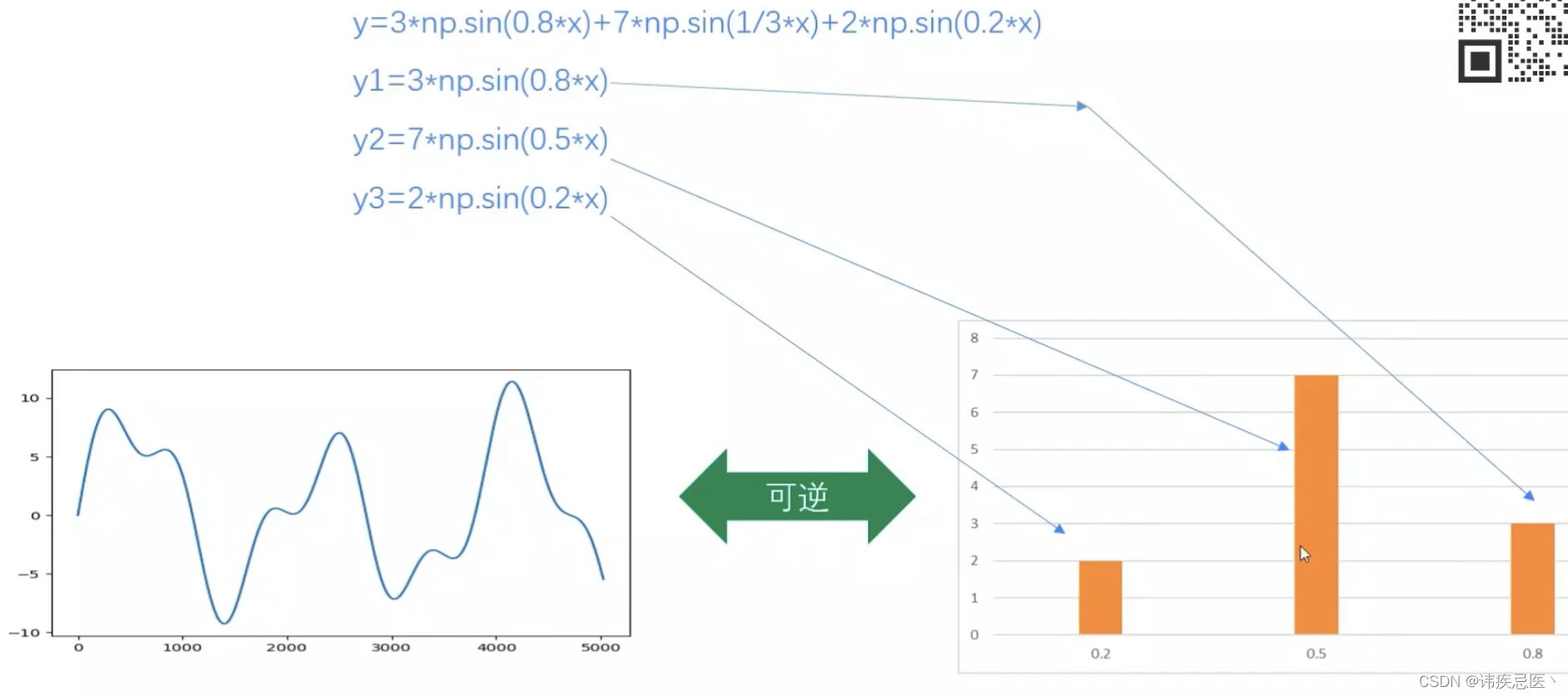
下面这两个图都是描述同一个事情,可以更明显看出,两者的区别。
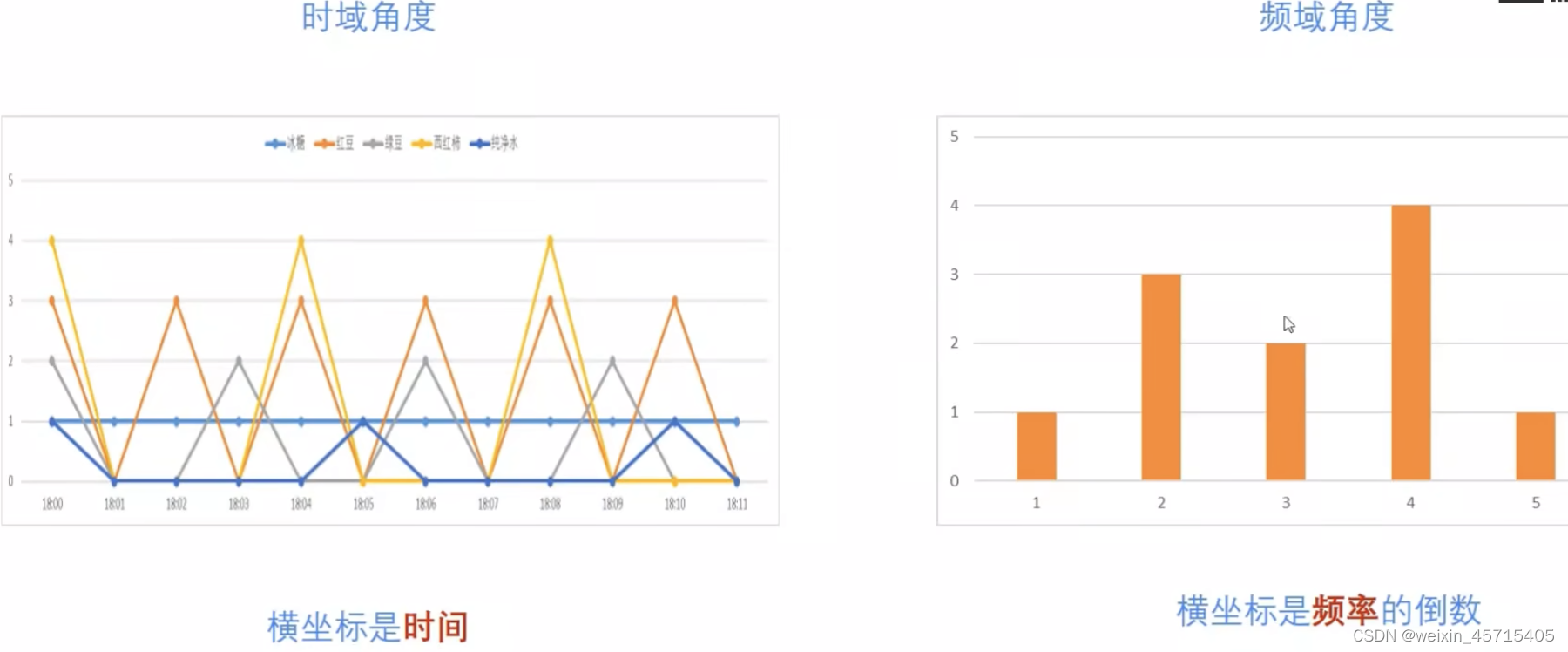
在两个角度去看周期函数的变化
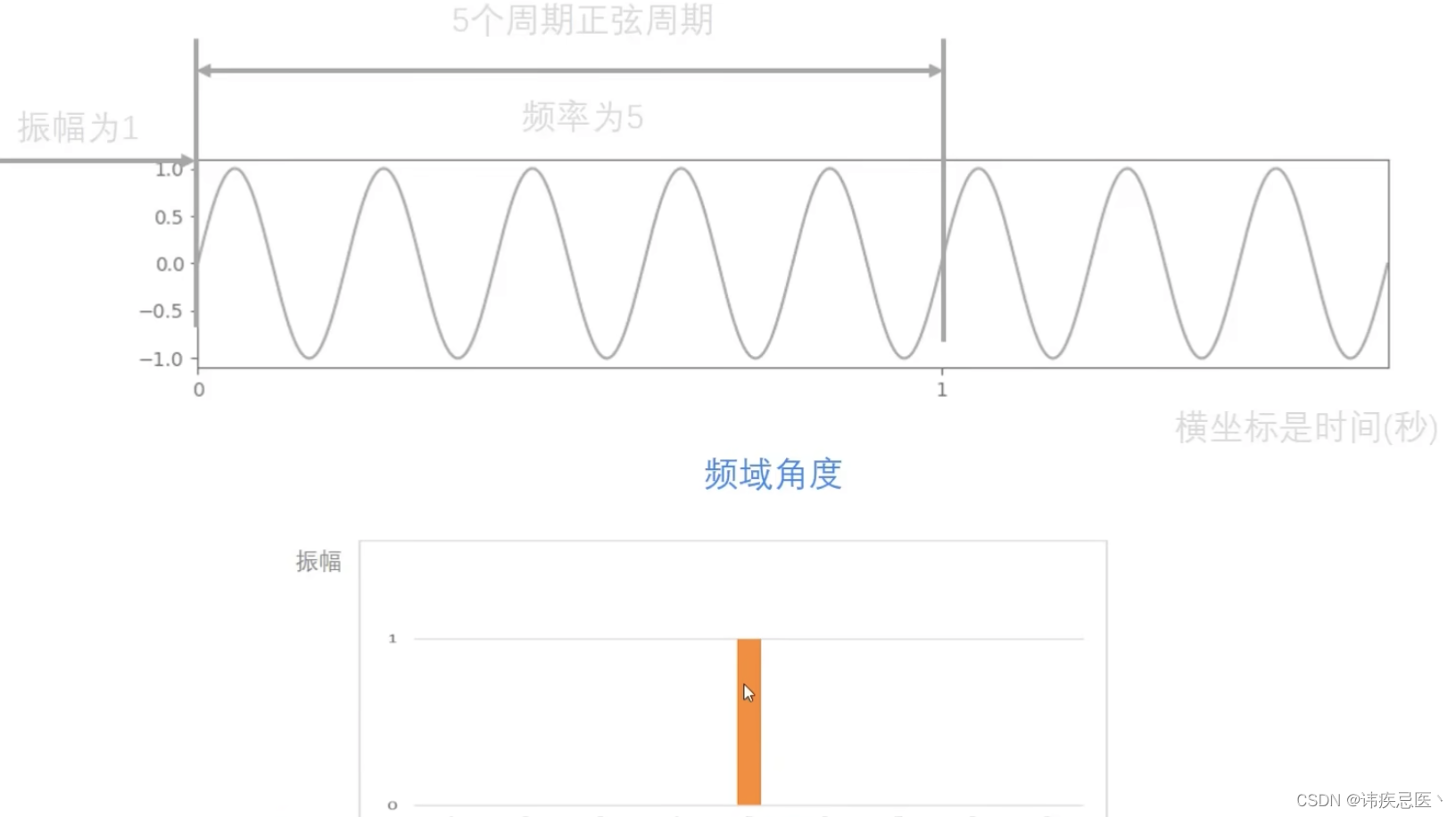
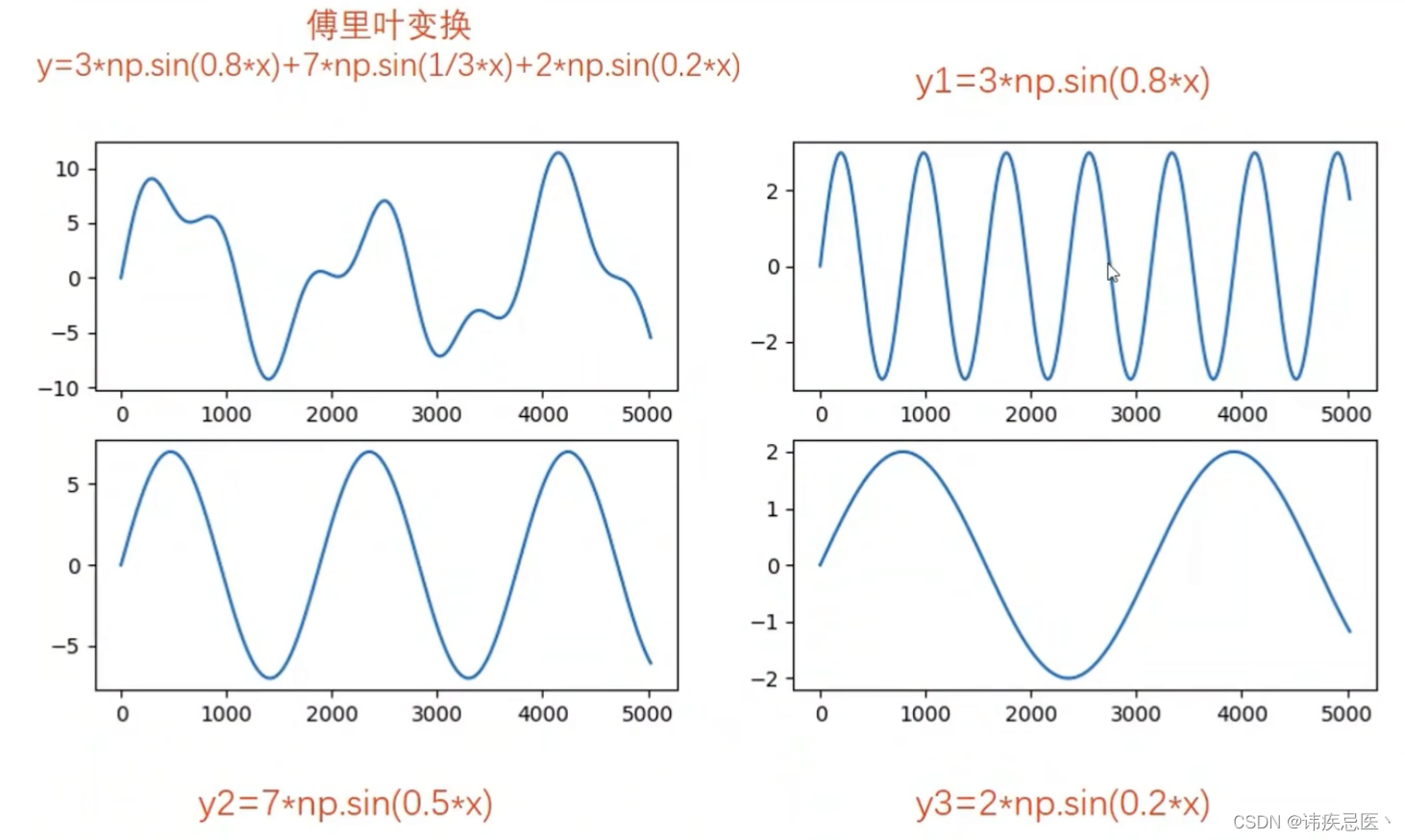
任何连续的周期信号,可以由一组适当的正𫠊曲线组成
相为:三个开始起点不一致的余𫠊函数,组成了这个曲线
2、通过numpy实现
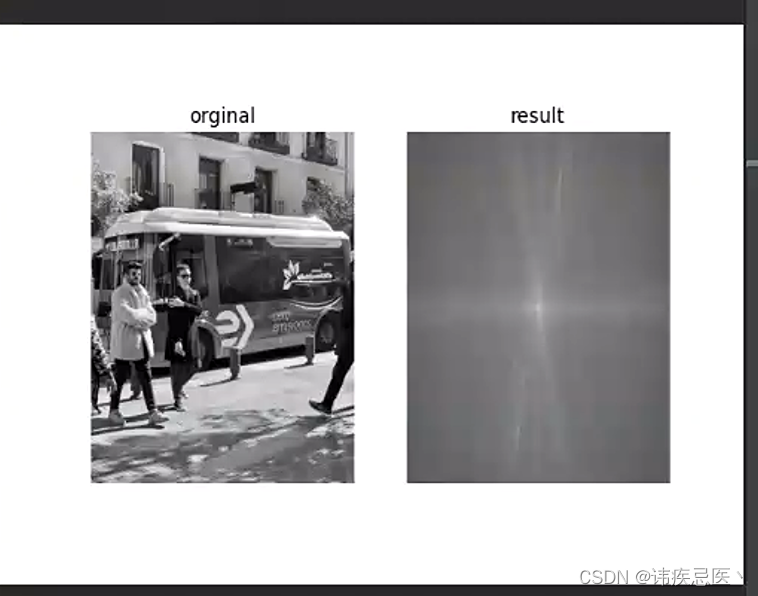
通过将原图进行傅里叶变换,得到频域图像,获得高频和低频,对高频和低频进行操作之后,进行逆变换回原图像达到对图像进行特色操作:图像增强、图像去噪、边缘检测、特征提取、压缩、加密等
1、低通滤波器:只保留低频信息,去掉高频信息,会去掉边缘特征信息,会让图像变模糊
2、高频滤波器:只保留高频信息,去掉低频信息,会增强图像的边缘和特征信息,但是会失去一些细节信息
def test9():img = cv2.imread("1.jpg", 0)# 执行傅里叶变换,转化为频域f = np.fft.fft2(img)# 低频在左上角,为了方便,将其移到中心位置(带负数的数组)fshift = np.fft.fftshift(f)# 通过将其转换为(0-255)中result = 20 * np.log(np.abs(fshift))# 原图显示# 创建窗口一行两列,第一咧plt.subplot(121)plt.imshow(img, cmap='gray')plt.title('orginal')# 不用坐标系plt.axis('off')# 傅里叶变换之后的图plt.subplot(122)plt.imshow(result, cmap='gray')plt.title('result')plt.axis('off')plt.show()
从频域转换会原图像(因为没有做任何操作,所以输出图像不会发生改变)
def test10():img = cv2.imread("1.jpg", 0)# 执行傅里叶变换,转化为频域f = np.fft.fft2(img)# 低频在左上角,为了方便,将其移到中心位置(带负数的数组)fshift = np.fft.fftshift(f)# 低频谱从中心移动到左上角(相当于又移回去)ishift = np.fft.ifftshift(fshift)# 从频域转换回原图像iimg = np.fft.ifft2(ishift)iimg = np.abs(iimg)# 原图显示# 创建窗口一行两列,第一咧plt.subplot(121)plt.imshow(img, cmap='gray')plt.title('orginal')# 不用坐标系plt.axis('off')# 傅里叶变换之后的图plt.subplot(122)plt.imshow(iimg, cmap='gray')plt.title('result')plt.axis('off')plt.show()
3、高通滤波器
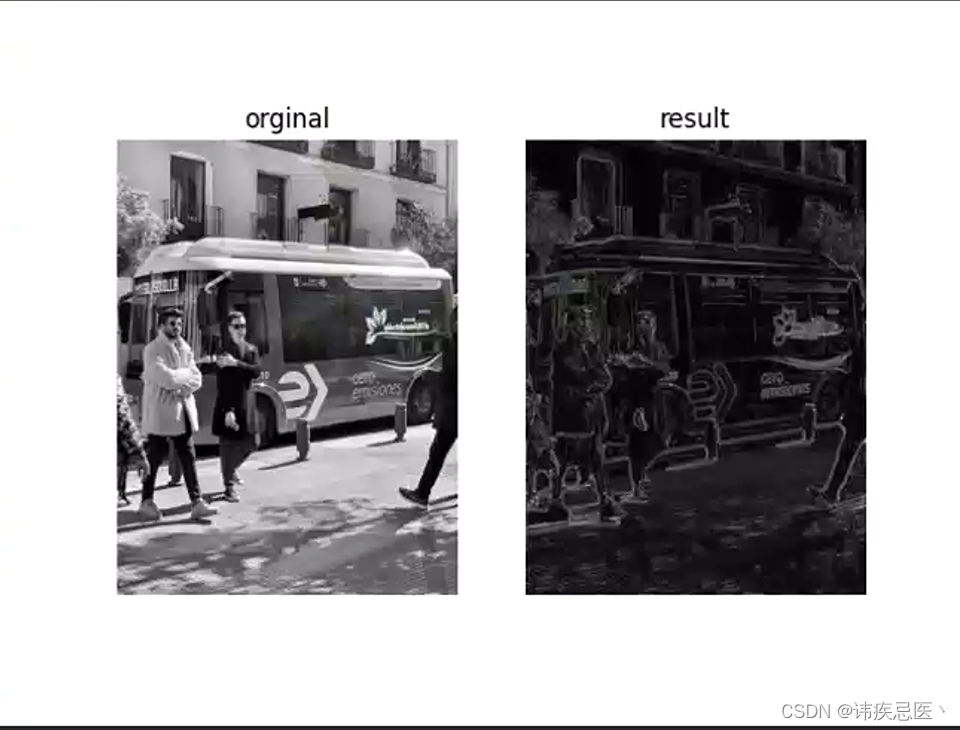
前面已经说过,高通滤波器是去除所有低频信息,达到图像增强的效果但是会失去一些细节信息。
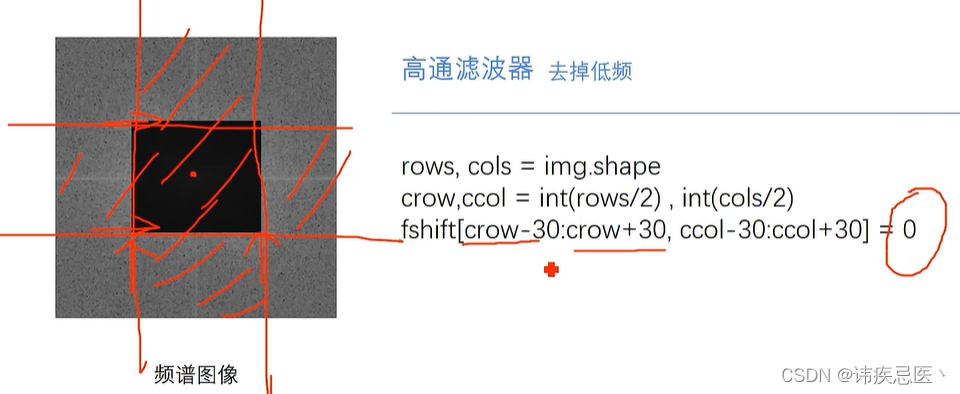
def test11():img = cv2.imread("1.jpg", 0)# 执行傅里叶变换,转化为频域f = np.fft.fft2(img)# 低频在左上角,为了方便,将其移到中心位置(带负数的数组)fshift = np.fft.fftshift(f)# 高宽 创建高通滤波器rows, cols = img.shapecrows, ccols = int(rows / 2), int(cols / 2)# 前面我们将低频信息移动到图像中间来了# 这里将低频信息全部设置为0,达到去掉低频信息目的fshift[crows - 30:crows + 30, ccols - 30:ccols + 30] = 0ifshift = np.fft.ifftshift(fshift)# 将频谱逆变换到图像iimg = np.fft.ifft2(ifshift)iimg = np.abs(iimg)plt.subplot(121)plt.imshow(img, cmap='gray')plt.title('orginal')# 不用坐标系plt.axis('off')# 傅里叶变换之后的图plt.subplot(122)plt.imshow(iimg, cmap='gray')plt.title('result')plt.axis('off')plt.show()
5、通过opencv实现傅里叶变换
使用opencv中的函数实现
def test12():img = cv2.imread("1.jpg", 0)# dft返回的是两个通道的频域,0是频域实部分,1是频域图像虚部分# DFT_COMPLEX_OUTPUT输出复数dft = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)dftshift = np.fft.fftshift(dft)idftshift = np.fft.ifftshift(dftshift)# 傅里叶逆变换iimg = cv2.idft(idftshift)# magnitude函数频域图像的幅度谱# result = 20 * np.log(cv2.magnitude(dftshift[:, :, 0], dftshift[:, :, 1]))result = cv2.magnitude(iimg[:, :, 0], iimg[:, :, 1])plt.subplot(121)plt.imshow(img, cmap='gray')plt.title('orginal')# 不用坐标系plt.axis('off')# 傅里叶变换之后的图plt.subplot(122)plt.imshow(result, cmap='gray')plt.title('result')plt.axis('off')plt.show()
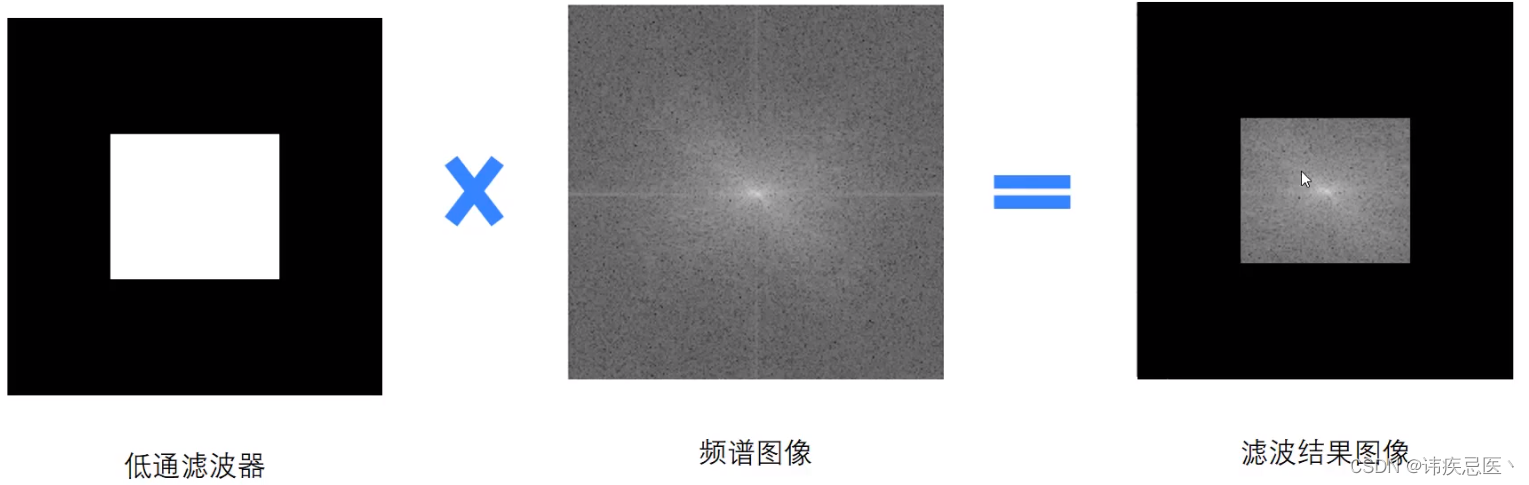
6、低通滤波器
创建一个mask,将中心位置设为1,其他位置设为0,然后和频谱图像相乘之后就只保留了低频信息了
def test13():img = cv2.imread("1.jpg", 0)# # 执行傅里叶变换dft = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)ifshift = np.fft.fftshift(dft)# 创建低通滤波器rows, cols = img.shapemask = np.zeros((rows, cols, 2), np.int8)crows, ccols = int(rows / 2), int(cols / 2)mask[crows - 30:crows + 30, ccols - 30:ccols + 30] = 1fshift = ifshift * maskishift = np.fft.ifftshift(fshift)io = cv2.idft(ishift)result = cv2.magnitude(io[:, :, 0], io[:, :, 1])plt.subplot(121)plt.imshow(img, cmap='gray')plt.title('orginal')# 不用坐标系plt.axis('off')# 傅里叶变换之后的图plt.subplot(122)plt.imshow(result, cmap='gray')plt.title('result')plt.axis('off')plt.show()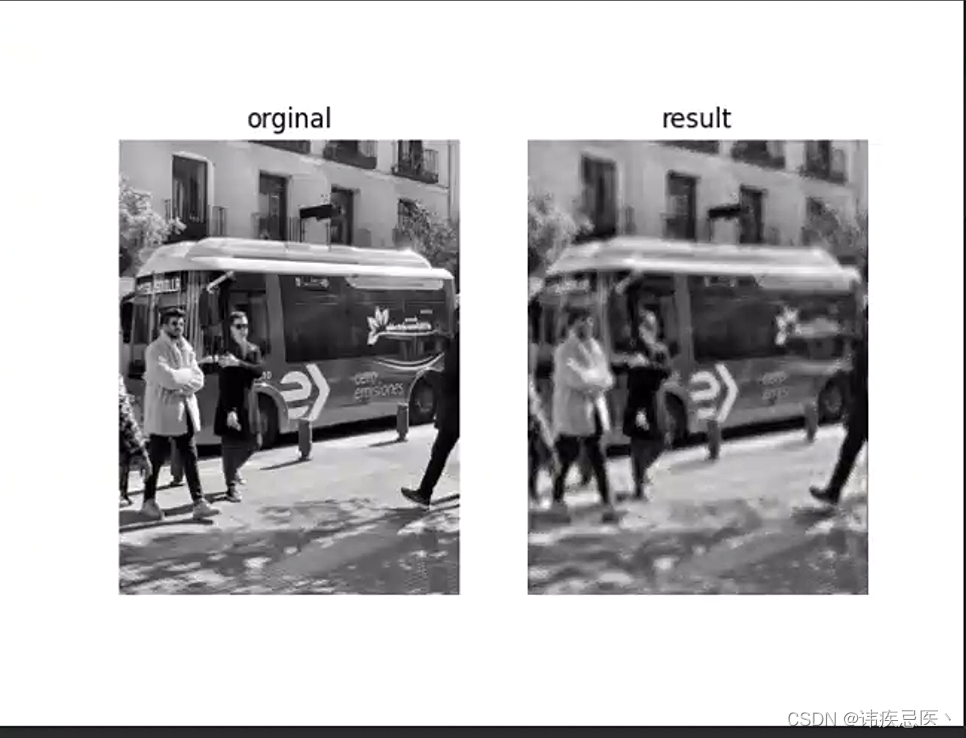
7、C++实现傅里叶变换
傅里叶变换:cv::dft()
执行一维或二维浮点数组的正向或反向离散傅里叶变换。
#include <opencv2/core.hpp>
函数说明:void cv::dft( InputArray src, OutputArray dst, int flags = 0, int nonzeroRows = 0 );
输入参数:(1)src 输入数组。可以是实数也可以是复数。(2)dst 输出数组。其大小和类型取决于flags。(3)flags = 0 转换标志。cv::DFT_INVERSE 执行1D或2D逆变换,而不是默认的正转换。cv::DFT_SCALE 缩放比例标识符,输出的结果会以1/N进行缩放。N=数组元素的数量cv::DFT_ROWS 对输入矩阵的每一行执行正变换或逆变换。能够同时处理多个向量,并减少3D和高维变换的开销。cv::DFT_COMPLEX_OUTPUT 一维或二维实数数组正变换。cv::DFT_REAL_OUTPUT 一维或二维复数数组逆变换。cv::DFT_COMPLEX_INPUT 指定输入为实数输入。输入必须有2个通道。cv::DCT_INVERSE 执行逆1D或2D转换,而不是默认的正向转换。cv::DCT_ROWS 对输入矩阵的每一行执行正变换或逆变换。能够同时处理多个向量,并减少3D和高维变换的开销。(4)nonzeroRows = 0 默认值为0。若设为非零值,dft函数会将该值作为非零行的有效区间长度,只对非零行进行处理,提高计算效率。傅里叶反变换:cv::idft()
计算一维或二维阵列的离散傅里叶反变换。
默认情况下,dft和idft都不会缩放结果。因此,您应该显式地将DFT_SCALE传递给dft或idft中的一个,以使这些变换相互逆。
#include <opencv2/core.hpp>
函数说明:void cv::idft( InputArray src, OutputArray dst, int flags = 0, int nonzeroRows = 0 );
输入参数:(1)src 输入数组。可以是实数也可以是复数。(2)dst 输出数组。其大小和类型取决于flags。(3)flags = 0 转换标志。cv::DFT_INVERSE 执行1D或2D逆变换,而不是默认的正转换。cv::DFT_SCALE 缩放比例标识符,输出的结果会以1/N进行缩放。N=数组元素的数量cv::DFT_ROWS 对输入矩阵的每一行执行正变换或逆变换。能够同时处理多个向量,并减少3D和高维变换的开销。cv::DFT_COMPLEX_OUTPUT 一维或二维实数数组正变换。cv::DFT_REAL_OUTPUT 一维或二维复数数组逆变换。cv::DFT_COMPLEX_INPUT 指定输入为实数输入。输入必须有2个通道。cv::DCT_INVERSE 执行逆1D或2D转换,而不是默认的正向转换。cv::DCT_ROWS 对输入矩阵的每一行执行正变换或逆变换。能够同时处理多个向量,并减少3D和高维变换的开销。(4)nonzeroRows = 0 默认值为0。若设为非零值,dft函数会将该值作为非零行的有效区间长度,只对非零行进行处理,提高计算效率。计算相位谱:cv::phase()
计算由x和y的对应元素组成的每个2D矢量的旋转角度。计算公式:angle(I)=atan2(y(I), x(I))
角度估计精度约为0.3度。当x(I)=y(I)=0时,对应角(I)设为0
#include <opencv2/core.hpp>
函数说明:void cv::phase( InputArray x, InputArray y, OutputArray angle, bool angleInDegrees = false );
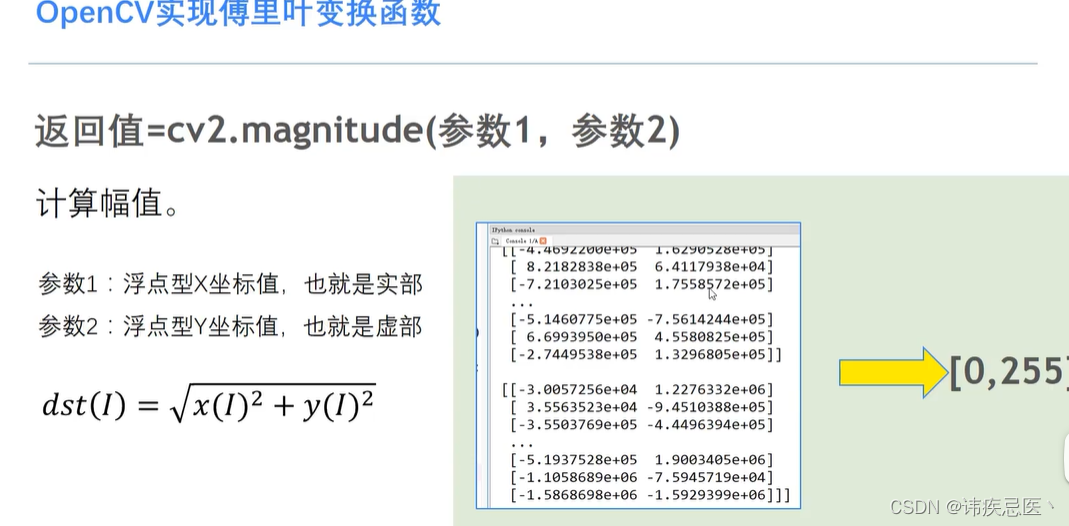
输入参数:(1)x 输入二维矢量的x坐标的浮点数组。(2)y 输入二维矢量的y坐标数组。它必须和x有相同的大小和类型。(3)angle 角度。输出与x大小和类型相同的数组。(4)angleInDegrees = false 当为true时,该函数以度数计算角度,否则以弧度计算。计算幅度谱:cv::magnitude()
计算由x和y数组的相应元素组成的2D向量的大小。计算公式:dst(I) = sqrt(x(I)^2 + y(I)^2)
#include <opencv2/core.hpp>
函数说明:void cv::magnitude( InputArray x, InputArray y, OutputArray magnitude );
输入参数:(1)x 输入二维矢量的x坐标的浮点数组。(2)y 输入二维矢量的y坐标数组。它必须和x有相同的大小和类型。(3)magnitude 幅值。输出与x大小和类型相同的数组。计算x和y的坐标:cv::polarToCart()
通过二维矢量的大小和角度来计算x和y的坐标。估计坐标的相对精度约为1e-6。
计算公式:x(I) = magnitude(I) * cos(angle(I))
计算公式:y(I) = magnitude(I) * sin(angle(I))
#include <opencv2/core.hpp>
函数说明:void cv::polarToCart( InputArray magnitude, InputArray angle, OutputArray x, OutputArray y, bool angleInDegrees = false );
输入参数:(1)magnitude 输入二维矢量(大小)的浮点数组。若为空矩阵,则假设所有的大小都是=1;若不为空,则必须具有与angle相同的大小和类型。(2)angle 输入二维矢量(角度)的浮点数组。(3)x 二维矢量的x坐标输出数组。它有相同的尺寸和类型的角度。(4)y 二维矢量的y坐标输出数组。它有相同的尺寸和类型的角度。(5)angleInDegrees = false 当为true时,输入角以度数表示,否则以弧度表示。获取最适合傅里叶正变换的宽 / 高:cv::getOptimalDFTSize()
DFT(傅里叶正变换)性能不是向量大小的单调函数。因此,当您计算两个数组的卷积或执行数组的频谱分析时,通常有必要在输入数据中填充零,以获得比原始数组转换速度快得多的更大的数组。大小为2的幂(2,4,8,16,32,…)的数组处理速度最快。但是,数组的大小是2、3和5的乘积(例如,300 = 55322)的处理效率也很高。
#include <opencv2/core.hpp>
函数说明:int cv::getOptimalDFTSize( int vecsize);
输入参数: vecsize 给定向量。如果vecsize太大(非常接近INT_MAX),则返回一个负数。
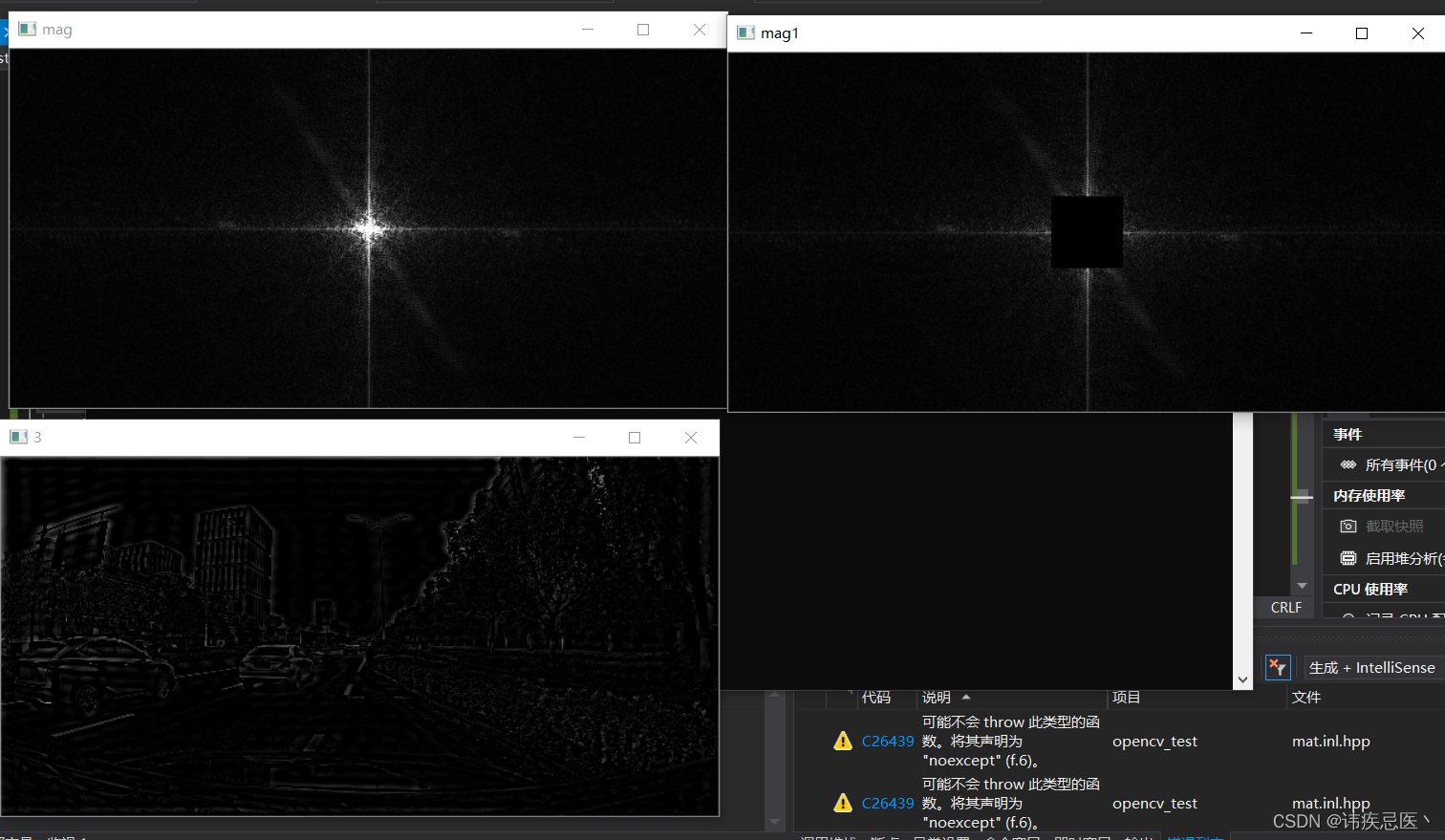
返回值: N 返回大于或等于vecsize的最小数 N。// 傅里叶变换
// 高频:变化剧烈的灰度分量,列如边界
// 低频:变化缓慢的灰度分量,例如一边大海
// 高频滤波器:只保留高频,会使得图像细节增强
// 低频滤波器:只保留低频,会使图像变模糊
void test_f()
{Mat img = imread("H:\\数据集\\已标注\\images\\datas\\all_datas\\1616003650999.jpg", IMREAD_GRAYSCALE);img.convertTo(img, CV_32F);// 数据准备// 离散傅里叶变换的运行速度与图像的大小有很大的关系,当图像的尺寸使2,3,5的整数倍时,计算速度最快// 为了达到快速计算的目的,经常通过添加新的边缘像素的方法获取最佳图像尺寸int w1 = getOptimalDFTSize(img.rows);int h1 = getOptimalDFTSize(img.cols);Mat padding;copyMakeBorder(img, padding, 0, w1-img.rows, 0, h1-img.cols, BORDER_CONSTANT,Scalar::all(0));// 执行傅里叶变换// 为傅立叶变换的结果分配存储空间// 将plannes数组组合成一个多通道的数组,两个同搭配,分别保存实部和虚部// 傅里叶变换的结果使复数,这就是说对于每个图像原像素值,会有两个图像值// 此外,频域值范围远远超过图象值范围,因此至少将频域储存在float中// 所以我们将输入图像转换成浮点型,并且多加一个额外通道来存储复数部分Mat planes[] = { Mat_<float>(padding),Mat::zeros(padding.size(),CV_32F) };Mat complexI;// planes[0]是实部,planes[1]是虚部merge(planes, 2,complexI);cout << complexI.size() << endl;cout << planes->size() << endl;dft(complexI, complexI, DFT_SCALE | DFT_COMPLEX_OUTPUT);split(complexI, planes);// 计算幅度普和相位谱Mat ph,mag,idft;phase(planes[0], planes[1], ph);magnitude(planes[0], planes[1], mag);// 重新排列傅里叶图像中的象限,使得原点位于图像中心int cx = mag.cols/2;int cy = mag.rows/2;Mat q1 = mag(Rect(0, 0, cx, cy));Mat q2 = mag(Rect(cx, 0, cx, cy));Mat q3 = mag(Rect(0, cy, cx, cy));Mat q4 = mag(Rect(cx, cy, cx, cy));// 变换左上角和右下角象限Mat tmp;q1.copyTo(tmp);q4.copyTo(q1);tmp.copyTo(q4);// 变换右上角和左下角q2.copyTo(tmp);q3.copyTo(q2);tmp.copyTo(q3);imshow("mag", mag);// 对频域进行滤波操作// 对频域进行滤波操作 高频滤波器,也可以直接这句代替// mag(Rect(cx - 30, cy - 30, 30 * 2, 30 * 2)) = 0;// 如果像素距离图像中心的水平偏差(abs(i - mag.cols / 2))或垂直偏差(abs(j - mag.rows / 2))大于图像尺寸的十分之一(mag.cols / 10 或 mag.rows / 10),则满足条件。for (int i = 0; i < mag.cols; i++) {for (int j = 0; j < mag.rows; j++) {if (abs(i - mag.cols / 2) > mag.cols / 10 || abs(j - mag.rows / 2) > mag.rows / 10)// 0表示低通、1表示高通mag.at<float>(j, i) = 1;}}imshow("mag1", mag);//3.4、变换左上角和右下角象限q1.copyTo(tmp);q4.copyTo(q1);tmp.copyTo(q4);//3.5、变换右上角和左下角象限q2.copyTo(tmp);q3.copyTo(q2);tmp.copyTo(q3);//(4)傅里叶逆变换polarToCart(mag, ph, planes[0], planes[1]);//由幅度谱mag和相位谱ph恢复实部planes[0]和虚部planes[1]merge(planes, 2, idft);dft(idft, idft, cv::DFT_INVERSE | cv::DFT_REAL_OUTPUT);// & -2 操作用于将宽度和高度向下取整为偶数img = idft(cv::Rect(0, 0, img.cols & -2, img.rows & -2));img.convertTo(img, CV_8U);imshow("3", img);waitKey(0);
}