simulink平面五杆机构运动学仿真
1、内容简介
略
68-可以交流、咨询、答疑
2、内容说明
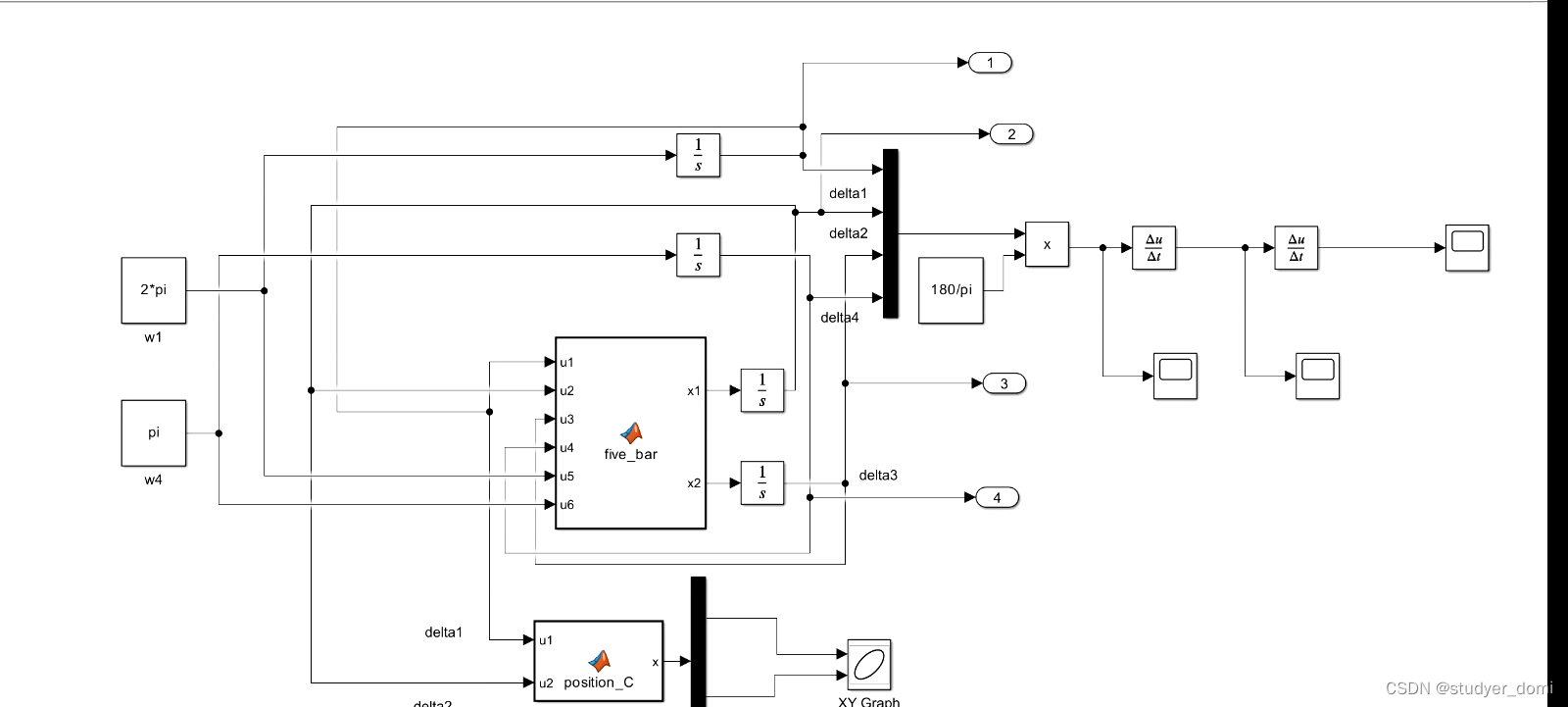
simulink平面五杆机构运动学仿真
[ 摘 要 ] 以 MATLAB 程序设计语言为平台 , 以平面可调五杆机构为主要研究对象 , 给定机构的尺寸参数 , 列出所
要分析机构的闭环矢量方程 , 使用 MATLAB 软件中 SIMULINK 仿真工具 , 在 SIMULINK 模型窗口下建立数学模
型 、 进行运动学仿真 , 优化机构参数 . 该方法编程工作量小 、 轨迹图形显示便捷 , 所建模型只需作少量更改即可适
应连杆机构的不同特征值 .
[ 关键词 ] 五杆机构 ;Matlab Simulink; 运动学仿真
3、仿真分析
略
4、参考论文
基于+SIMULINK+平面五杆机构运动学仿真.pdf
基于Matlab-simulink的齿轮五杆机构运动仿真研究.pdf