rt-thread 移植调试记录
rt-thread 移植调试记录
记录rt-thread移植的过程。这里移植仅仅是利用rt-thread源码目录已经移植好的文件,组建自己的工程,不需要自己编写汇编完成底层移植。
1. 搭建基础工程
这里使用的是正点原子的潘多拉开发板,MCU为stm32l475。需要先通过CubeMX搭建基础工程。
选择从芯片创建工程。
1.1 CubeMX创建工程
开启RCC:

开启串口:

开启LED对应的GPIO:

配置时钟,stml475主频为80M:

最后生成MDK工程。
1.2 工程配置
1.2.1 KEIL工程配置
使用KEIL打开MDK工程。
配置microlib:

配置Debug下载程序重启芯片:

1.2.2 添加串口打印
#include <stdio.h>
int fputc(int ch, FILE *f)
{uint8_t c = ch;HAL_UART_Transmit(&huart1, &c, 1, 5000);return (ch);
}
1.2.3 点亮LED
int main()
{......while (1){HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7, GPIO_PIN_RESET);printf("test\r\n");HAL_Delay(1000);}
}
1.2.4 编译下载
编译下载程序。可以看到开发板的LED灯变红。串口输出“test”字符串。

2. 移植rt-thread
完成基础工程创建后,接下来就是移植工作了。
先将rt-thread源码目录下的src,include, libcpu 目录复制一分到MDK工程中,移植时,直接添加需要的文件即可。
2.1 添加平台相关文件
参考RT-Thread Studio IDE的工程,就能够发现,主要的移植工作就在libcpu目录中,主要为context_gcc.S。根据我们使用的芯片架构,进行移植。由于rt-thread源码目录提供了各个平台的已经移植完成的文件,我们只需要根据芯片架构进行添加即可。

主要是开关中断,线程切换,PendSV相关的函数的移植。这部分内容需要会汇编才能做。因此直接使用现成已经移植好的直接使用即可。 比如上述stm32l475芯片,架构是Contex-M4。可以直接在rt-thread源码目录下libcpu\arm\cortex-m4找到对应的文件:

这里,context_gcc.S用于RT-Thread Studio IDE工具链使用的,context_rvds.S 用于MDK的工具链使用,另外一个看名字就知道是IAR使用的了。
除了上述文件,还需要将cpuport.c也添加到工程中。另外还有上层目录的common目录下,也有部分移植文件,这部分内容暂时可不添加。
2.2 添加内核相关文件
将src目录的所有文件添加到工程中。
2.3 添加头文件路径

2.4 添加rtconfig.h
找到一份基础的rtconfig.h文件,添加到工程中。我这里的基础文件是通过RT-Thread Studio创建的基础工程,直接复制使用的。
添加完成后,KEIL工程结构如下:

整体工程结构如下:

2.5 编译
完成上述添加,基本上就是添加了我们需要的纯rtt内核了,没有使用到rtt的组件。直接编译会报很多错误,因此针对上面的工程还需要做一些修改。
先直接编译看看错误:

主要看到的就是va_list未定义的错误。这个错误是因为缺少头文件,我们在rtconfig.h中添加头文件即可:
#include <stdarg.h>
接着编译,依然报错:

没有找到finsh.h头文件,由于我们rtconfig.h中启用了finsh组件,但是没有添加这个组件相关的文件导致的报错,在rtconfig.h文件中取消使用finsh即可,注释掉相关宏定义:
/* Command shell *///#define RT_USING_FINSH
//#define FINSH_THREAD_NAME "tshell"
//#define FINSH_USING_HISTORY
//#define FINSH_HISTORY_LINES 5
//#define FINSH_USING_SYMTAB
//#define FINSH_USING_DESCRIPTION
//#define FINSH_THREAD_PRIORITY 20
//#define FINSH_THREAD_STACK_SIZE 4096
//#define FINSH_CMD_SIZE 80
//#define FINSH_USING_MSH
//#define FINSH_USING_MSH_DEFAULT
//#define FINSH_USING_MSH_ONLY
//#define FINSH_ARG_MAX 10
/* end of Command shell */
接着编译,报错:

这是两个奇怪的问题,特别是下面这个,找半天也不知道哪儿出错了。最后对比RT-Thread Studio生成的基础工程,发现工程中并没有导入driver.c和cpu.c这两个文件。看这个cpu.c应该是多核MCU使用的,因此在KEIL工程中删除这两个文件。
再编译,报错:
这是因为生成MDK工程,需要我们在stm32l4xx_it.c移植这两个函数,但是我们已经在context_rvds.S中移植了这两个中断函数,因此出现了重定义的错误。可以直接注释掉stm32l4xx_it.c中重定义的函数,或者将其生命为弱符号:
__attribute__((weak)) void HardFault_Handler(void)
{/* USER CODE BEGIN HardFault_IRQn 0 *//* USER CODE END HardFault_IRQn 0 */while (1){/* USER CODE BEGIN W1_HardFault_IRQn 0 *//* USER CODE END W1_HardFault_IRQn 0 */}
}__attribute__((weak)) void PendSV_Handler(void)
{/* USER CODE BEGIN PendSV_IRQn 0 *//* USER CODE END PendSV_IRQn 0 *//* USER CODE BEGIN PendSV_IRQn 1 *//* USER CODE END PendSV_IRQn 1 */
}
在编译,还是报错:

函数rt_hw_board_init未定义,这里也可以抄一抄,在RT-Thread Studio中生成的board.c中的定义,创建board.c和board.h,添加到工程中。将该函数的实现也按照board.c中的样子重写一下。
将main.c中的初始化都放到这个函数中来,另外还需要实现SysTick_Handler函数,为rtt提供系统时间。board.c:
#include "board.h"
#include "rtthread.h"
#include "usart.h"
#include "gpio.h"void SystemClock_Config(void);void rt_hw_board_init()
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();rt_system_heap_init((void *)HEAP_BEGIN, (void *)HEAP_END);HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / RT_TICK_PER_SECOND);HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}void SysTick_Handler(void)
{rt_interrupt_enter();HAL_IncTick();rt_tick_increase();rt_interrupt_leave();
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK){Error_Handler();}/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 1;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
board.h:
#ifndef __BOARD_H
#define __BOARD_H#include <stm32l4xx.h>#define STM32_FLASH_START_ADRESS ((uint32_t)0x08000000)
#define STM32_FLASH_SIZE (512 * 1024)
#define STM32_FLASH_END_ADDRESS ((uint32_t)(STM32_FLASH_START_ADRESS + STM32_FLASH_SIZE))#define STM32_SRAM1_SIZE (96)
#define STM32_SRAM1_START (0x20000000)
#define STM32_SRAM1_END (STM32_SRAM1_START + STM32_SRAM1_SIZE * 1024)#if defined(__ARMCC_VERSION)
extern int Image$$RW_IRAM1$$ZI$$Limit;
#define HEAP_BEGIN ((void *)&Image$$RW_IRAM1$$ZI$$Limit)
#elif __ICCARM__
#pragma section="CSTACK"
#define HEAP_BEGIN (__segment_end("CSTACK"))
#else
extern int __bss_end;
#define HEAP_BEGIN ((void *)&__bss_end)
#endif#define HEAP_END STM32_SRAM1_ENDvoid rt_hw_board_init(void);#endif最后再编译,完成,没有报错了。

2.6 调试
下载程序,发现终端没有输出,LED也没有变化。使用KEIL的Debug功能,找到出错的地方。
回退一点,会发现,程序死在了主线程创建的位置:
thread = (struct rt_thread *)rt_object_allocate(RT_Object_Class_Thread,name);if (thread == RT_NULL)return RT_NULL;
跟踪发现,是由于内存分配失败导致的,需要分配内存的指针始终指向NULL:
#define _MEM_MALLOC(...) RT_NULLrt_weak void *rt_malloc(rt_size_t size)
{rt_base_t level;void *ptr;/* Enter critical zone */level = _heap_lock();/* allocate memory block from system heap */ptr = _MEM_MALLOC(size);/* Exit critical zone */_heap_unlock(level);/* call 'rt_malloc' hook */RT_OBJECT_HOOK_CALL(rt_malloc_hook, (ptr, size));return ptr;
}
查看kservice.c文件,实际可以通过rtconfig.h中的宏定义来控制内存分配的实现方式,这里指定RT_USING_SMALL_MEM_AS_HEAP 作为内存分配方式,将这个宏添加到rtconfig.h中宏定义。
/* Memory Management */
#define RT_USING_MEMPOOL
#define RT_USING_SMALL_MEM
#define RT_USING_HEAP
#define RT_USING_SMALL_MEM_AS_HEAP
/* end of Memory Management */
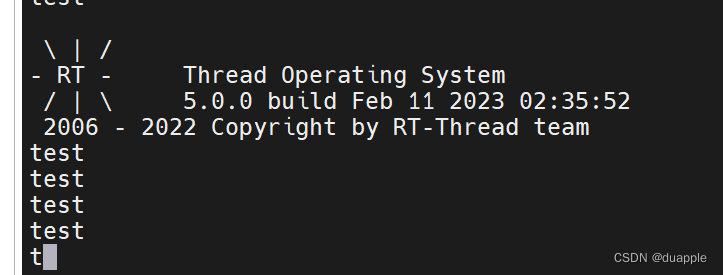
再次编译,没有报错,稍留程序,LED灯点亮,串口输出正常,输出字符串“test”。
移植控制台输出,在board.c中添加:
void rt_hw_console_output(const char *str)
{RT_ASSERT(str != RT_NULL);char ch;while (*str != '\0'){if (*str == '\n') {ch = '\r';HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 5000);}HAL_UART_Transmit(&huart1, (uint8_t *)str++, 1, 5000);}
}
完成:
最后再在主线程中创建一个线程,进行测试:
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5void led_thread_entry(void *parameter)
{while (1){rt_kprintf("enter test thread\n");rt_thread_delay(RT_TICK_PER_SECOND);}
} int main()
{rt_thread_t tid;tid = rt_thread_create("led", led_thread_entry, RT_NULL, THREAD_STACK_SIZE, THREAD_PRIORITY, THREAD_TIMESLICE);if (tid != RT_NULL){rt_thread_startup(tid);} else {rt_kprintf("create thread error\n");}while (1){HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7, GPIO_PIN_RESET);rt_kprintf("test\r\n");rt_thread_delay(1000);}
}
这里注意将API都修改为rtt的,否则打印只会出现test,enter test thread 不会出现:
