[LeetBook]【学习日记】寻找链表相交节点
来源于「Krahets」的《图解算法数据结构》
https://leetcode.cn/leetbook/detail/illustration-of-algorithm/
本题与主站 160 题相同:https://leetcode-cn.com/problems/intersection-of-two-linked-lists/
训练计划 V
某教练同时带教两位学员,分别以链表 l1、l2
记录了两套核心肌群训练计划,节点值为训练项目编号。两套计划仅有前半部分热身项目不同,后续正式训练项目相同。请设计一个程序找出并返回第一个正式训练项目编号。如果两个链表不存在相交节点,返回null 。输入说明:
intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0
l1 - 第一个训练计划链表
l2 - 第二个训练计划链表
skip1 - 在 l1 中(从头节点开始)跳到交叉节点的节点数
skip2 - 在 l2 中(从头节点开始)跳到交叉节点的节点数
程序将根据这些输入创建链式数据结构,并将两个头节点 head1 和 head2
传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被视作正确答案 。示例 1:
输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,0,1,8,4,5], skipA
= 2, skipB = 3 输出:Reference of the node with value = 8 解释:第一个正式训练项目编号为 8 (注意,如果两个列表相交则不能为 0)。从各自的表头开始算起,链表 A 为 [4,1,8,4,5],链表 B 为[5,0,1,8,4,5]。在 A 中,相交节点前有 2 个节点;在 B 中,相交节点前有 3 个节点。示例 2:
输入:intersectVal = 2, listA = [0,9,1,2,4], listB = [3,2,4], skipA = 3,
skipB = 1 输出:Reference of the node with value = 2 解释:第一个正式训练项目编号为 2
(注意,如果两个列表相交则不能为 0)。从各自的表头开始算起,链表 A 为 [0,9,1,2,4],链表 B 为 [3,2,4]。在 A中,相交节点前有 3 个节点;在 B 中,相交节点前有 1 个节点。示例 3:
输入:intersectVal = 0, listA = [2,6,4], listB = [1,5], skipA = 3, skipB
= 2 输出:null 解释:两套计划完全不同,返回 null。从各自的表头开始算起,链表 A 为 [2,6,4],链表 B 为 [1,5]。由于这两个链表不相交,所以 intersectVal 必须为 0,而 skipA 和 skipB 可以是任意值。注意:
如果两个链表没有交点,返回 null. 在返回结果后,两个链表仍须保持原有的结构。 可假定整个链表结构中没有循环。 程序尽量满足 O(n)
时间复杂度,且仅用 O(1) 内存。 本题与主站 160题相同:https://leetcode-cn.com/problems/intersection-of-two-linked-lists/作者:Krahets
链接:https://leetcode.cn/leetbook/read/illustration-of-algorithm/7fvoq2/
来源:力扣(LeetCode) 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
暴力解法
- 利用 unordered_set 这种数据结构存储 A 链表节点,由于这种结构的 find 效率很高,故可在其中直接检索是否存在 B 链表的节点,存在则为交点
class Solution {
public:ListNode *getIntersectionNode(ListNode *headA, ListNode *headB) {unordered_set<ListNode *> addrOfNode;while(headA){addrOfNode.insert(headA);headA = headA->next; }while(headB){if(addrOfNode.find(headB) != addrOfNode.end()){return headB;}else{headB = headB->next;}}return nullptr;}
};
双指针解法
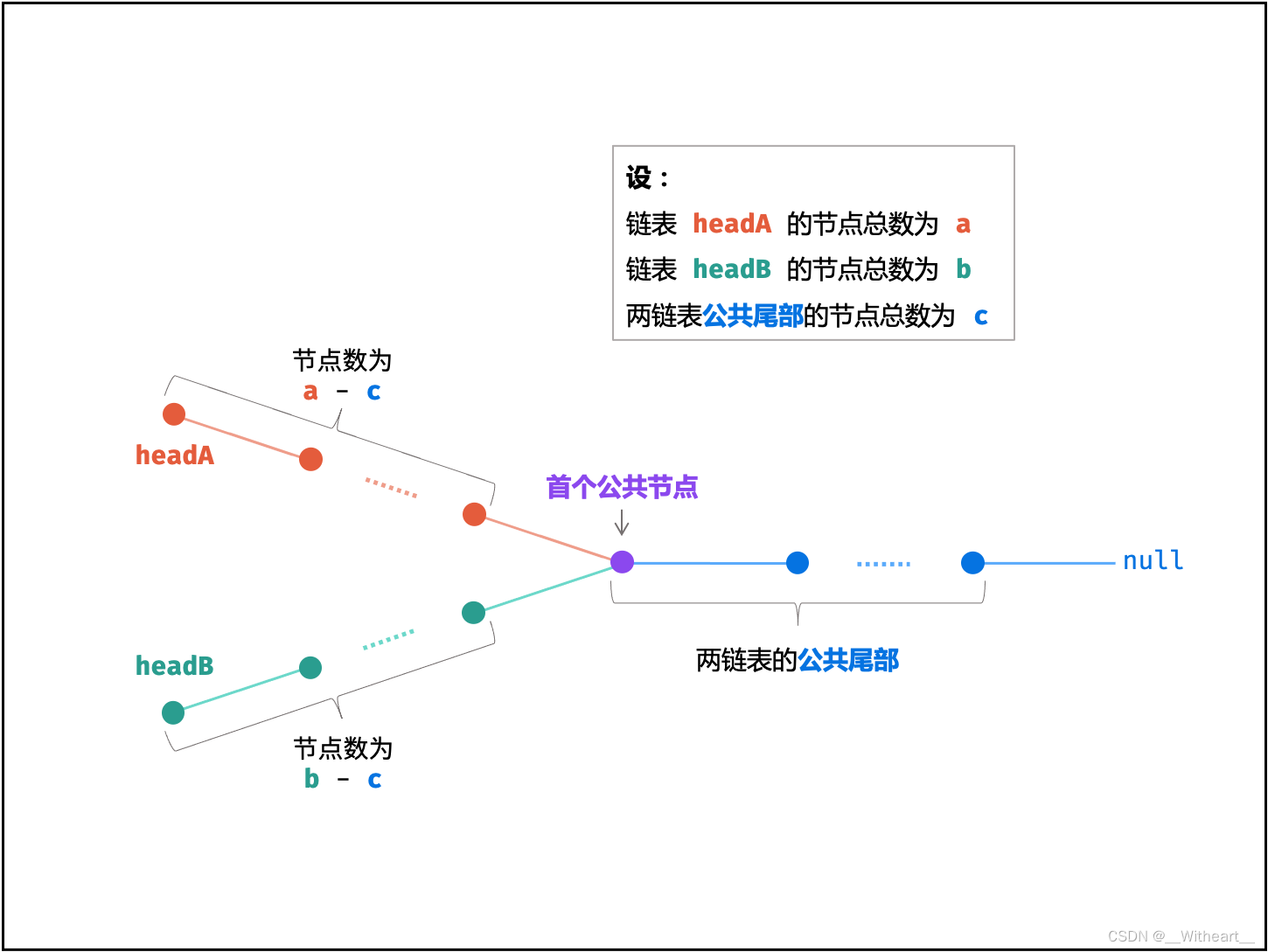
- 设置指针 a 和 b 分别遍历两条链表后再遍历对方那一条链表,指针相遇有a+(b−c)=b+(a−c),即为交点
class Solution {
public:ListNode *getIntersectionNode(ListNode *headA, ListNode *headB) {ListNode *a = headA, *b = headB;while(a != b){a = a ? a->next : headB;b = b ? b->next : headA;}return a;}
};