VR全景HDR拍摄教程
什么是HDR? HDR可以用在哪里?
书面解释:HDR(高动态范围 High Dynamic Range)摄影,是摄影领域广泛使用的一种技术。
是不是有点懵? 我们来看一个实际的拍摄现场环境,你就懂了
我们要拍摄一个,傍晚弱光环境的酒店,环境整体光线较暗, 但人造光源又比较亮。 这时如果我们以环境光线为基础设置曝光,可以看到,人造光源包括室内,会出现曝光过渡,高光溢出的情况。(下图,红圈部分)

同时,门前的灌木,背光处出现了 曝光不足的情况。
假设,我们以人造光源为测光点, 下图,可以看到虽然人造光源的地方保留了更多细节, 但其他区域整体处于曝光不足,同样也缺乏足够细节。

为了让背光处,保留更多细节, 在整体提升了曝光后,可以看到镜头前的灌木展现出了更多的细节,但是人造光源曝光过渡,已经没有细节了。

在这种情况下,能不能保留三张照片中各自的优点, 让暗光部分、高光部分都保留足够的细节? 这个技术就叫HDR 通过HDR合成(三张或更多不同曝光的照片),我们就得到了一张不论高光、暗部都呈现出了足够的细节的照片。

通过这个案例就可以说明,HDR摄影比较适合 “光比”较大场景,如室内外光照差异大的地方、城市夜景、建筑空间等。
HDR的这些特点可以说与720云 VR全景简直就是绝配, 因此这也是一名优秀VR全景摄影创作者必备技能。
那么如何将HDR技术应用到VR全景摄影当中呢?
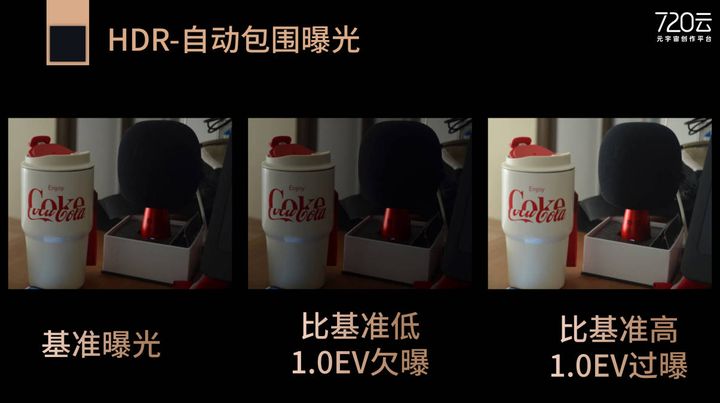
大多数相机都有自动包围曝光(AEB)功能,允许你快速连拍几张不同曝光的照片。通常,至少需要三张照片:一张正常曝光、一张过曝和一张欠曝。 包围曝光的设置
以尼康相机为例,设置菜单中可以看到“自动包围”菜单,有不同AE参数设置,以“AE1.0”为例,通常指的是曝光补偿或曝光增减的步长为1.0EV(曝光值)。这意味着在进行自动包围曝光拍摄时,相机将自动拍摄一系列照片,其中每张照片的曝光值将比上一张多1.0EV或少1.0EV。

具体来说,如果你设置了AEB为"AE 1.0"并选择拍摄3张照片,你按三次快门,将会得到三张不同曝光的照片:
光圈的设置:使用光圈优先模式保持光圈大小不变,确保场景景深的一致性。
焦距的设置:我们拍摄VR全景是多张照片拼接而成,因此对焦模式使用手动对焦,确保所有拍摄的图片焦距一致,以便于后期拼接。
完成以上准备和拍摄后,就可以使用lightroom 进行HDR合成了。具体的操作流程可以看这里的这边教学 ——
LightRoom 批量合并HDRwww.720yun.com/bbs/article?id=697
除此之外,也可以使用Ptgui直接进行VR全景的HDR合成与拼接,方法也很简单
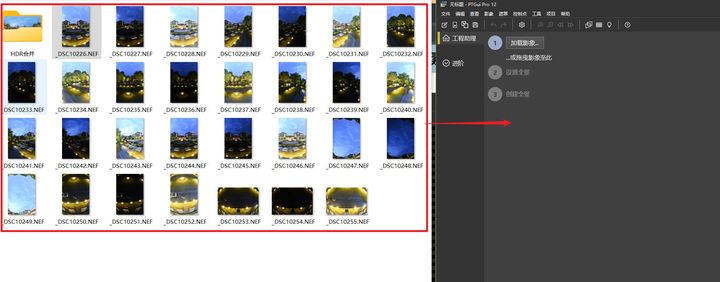
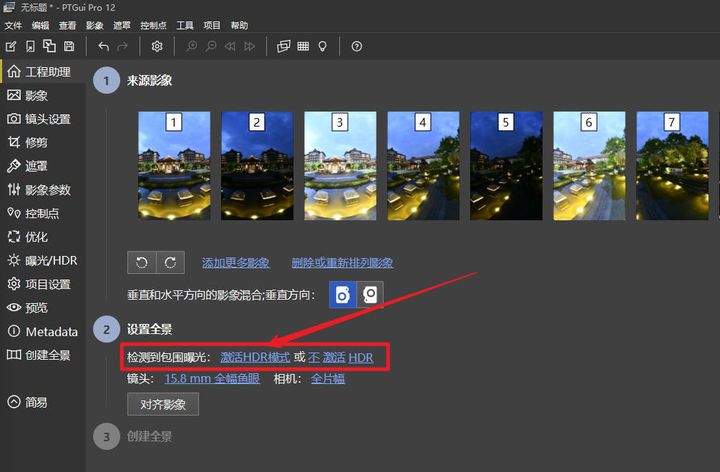
只需将所拍摄的HDR所有照片拖拽到 PTgui界面中,软件自动提示 “是否激活HDR模式”
合成HDR之后,还需要使用Camrea RAW 滤镜对合成的照片进行调色,调整色彩平衡、对比度、亮度等。
拼接后的全景图,同样需要检查全景图的接缝是否自然,HDR图像的细节是否丰富。
最后建议大家经常实践,尝试不同的曝光组合和后期处理设置,找到最适合特定场景的方法。学习并应用图像编辑软件的高级功能,如局部调整工具,以进一步提升图像质量。
通过掌握这些技巧,你将能够创造出令人印象深刻的VR全景HDR图像,无论是用于个人项目还是商业展示,都能够展现出非凡的视觉效果。也是跨入专业VR全景创作者必须经历和掌握的。