Qt实用技巧:QCustomPlot做北斗GPS显示绝对位置运动轨迹和相对位置运动轨迹图的时,使图按照输入点顺序连曲线
若该文为原创文章,转载请注明原文出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/136131310
红胖子网络科技博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…
Qt开发专栏:实用技巧
需求
使用QCustomPlot绘制多个目标的北斗运行轨迹图,包括累计绝对位置图和记录时刻的相对位置图。
当前绘制存在问题:

交付客户前,公司内部自测流程发现的问题。
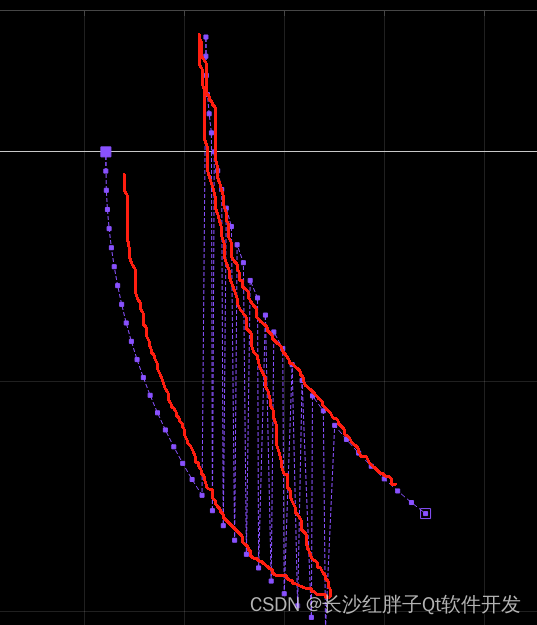
实际预期效果为:
原因
QCustomPlot加入数据是按照x轴排列,也可以按照y轴排列,使用图层就只能这样。
尝试一:使用QCPGraph排序

确认不支持曲线图:

尝试二:查看官方曲线Demo源码
查看官方配套的曲线Demo(注意:全部搜索了”spline“都没有,这是想看下支持三次插值绘制曲线的额外功能,但是搜索可能某些版本有):
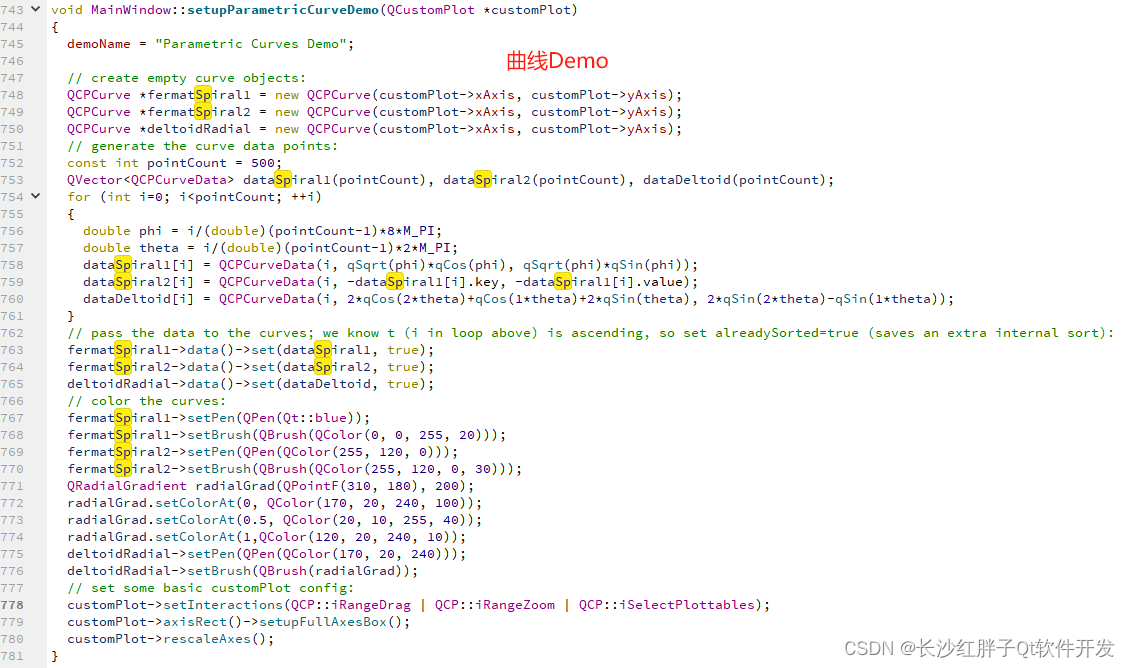

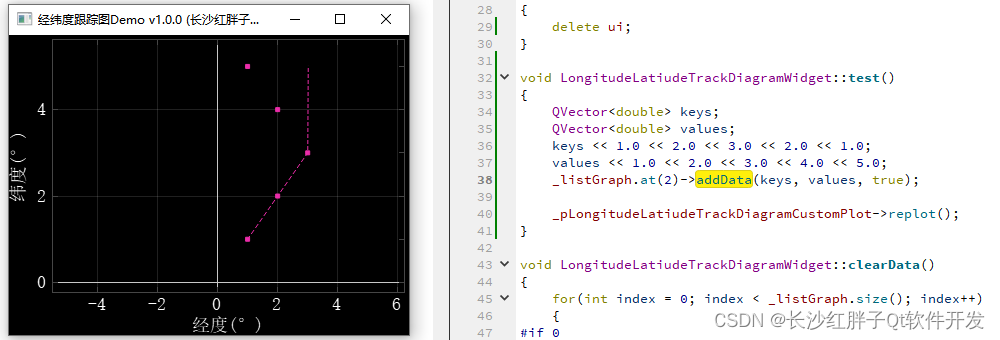
QCustomPlot要按照输入点顺序连线,那么就需要直接使用曲线QCPCurve(曲线类)进行操作,而不是使用QCPGraph类(addGraph产出)
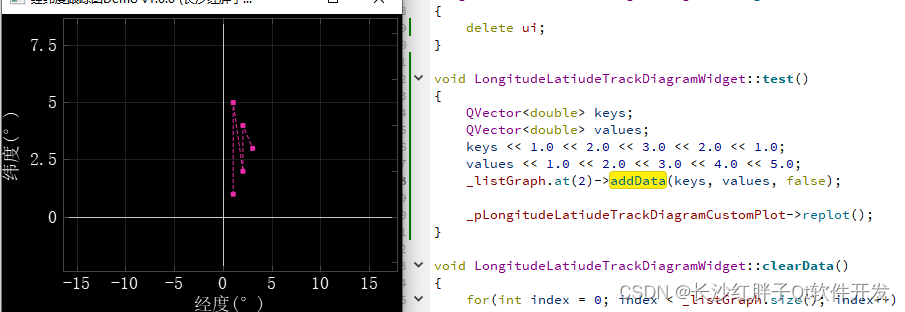
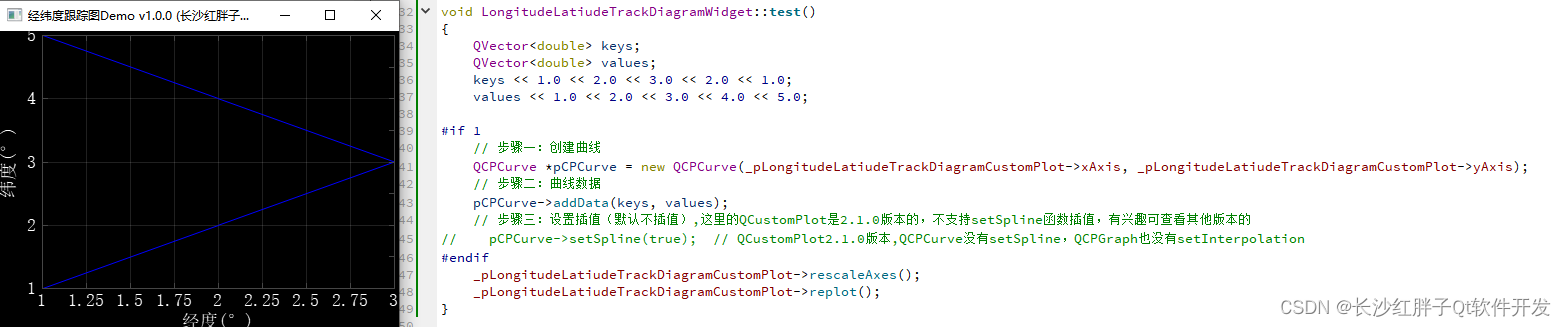
测试数据如下:
void LongitudeLatiudeTrackDiagramWidget::test()
{QVector<double> keys;QVector<double> values;keys << 1.0 << 2.0 << 3.0 << 2.0 << 1.0;values << 1.0 << 2.0 << 3.0 << 4.0 << 5.0;// 步骤一:创建曲线QCPCurve *pCPCurve = new QCPCurve(_pLongitudeLatiudeTrackDiagramCustomPlot->xAxis, _pLongitudeLatiudeTrackDiagramCustomPlot->yAxis);// 步骤二:曲线数据pCPCurve->addData(keys, values);_pLongitudeLatiudeTrackDiagramCustomPlot->replot();
}
测试效果如下:
解决方法
1.重新定制控件,每一个目标由QCPGraph改为QCPCurve
2.同步修改操作修改清空、添加、属性设置、缓存等操作函数
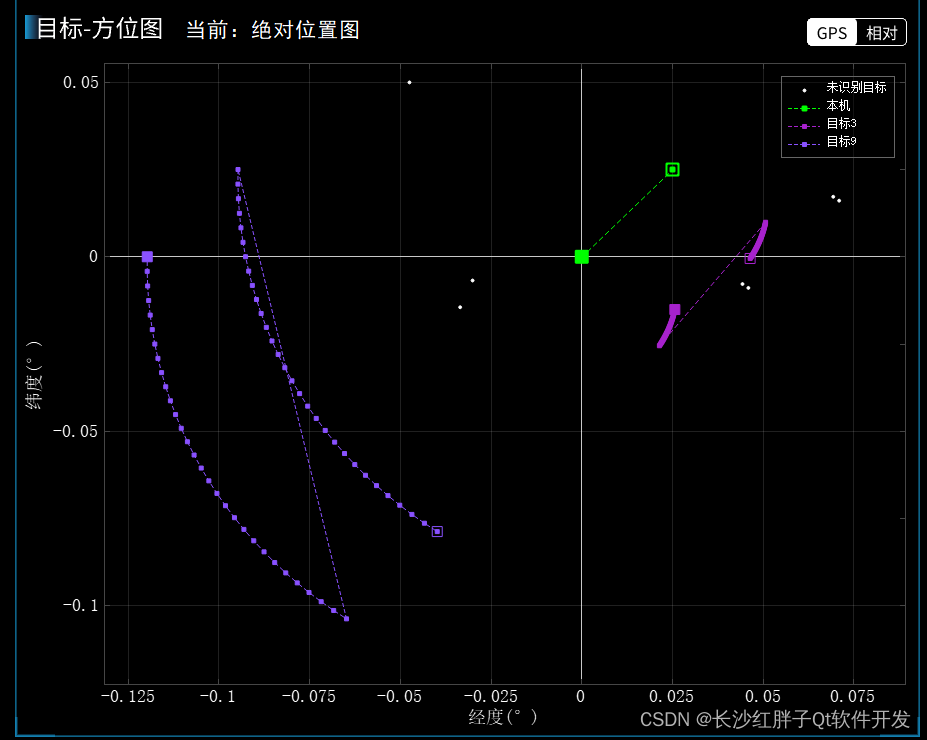
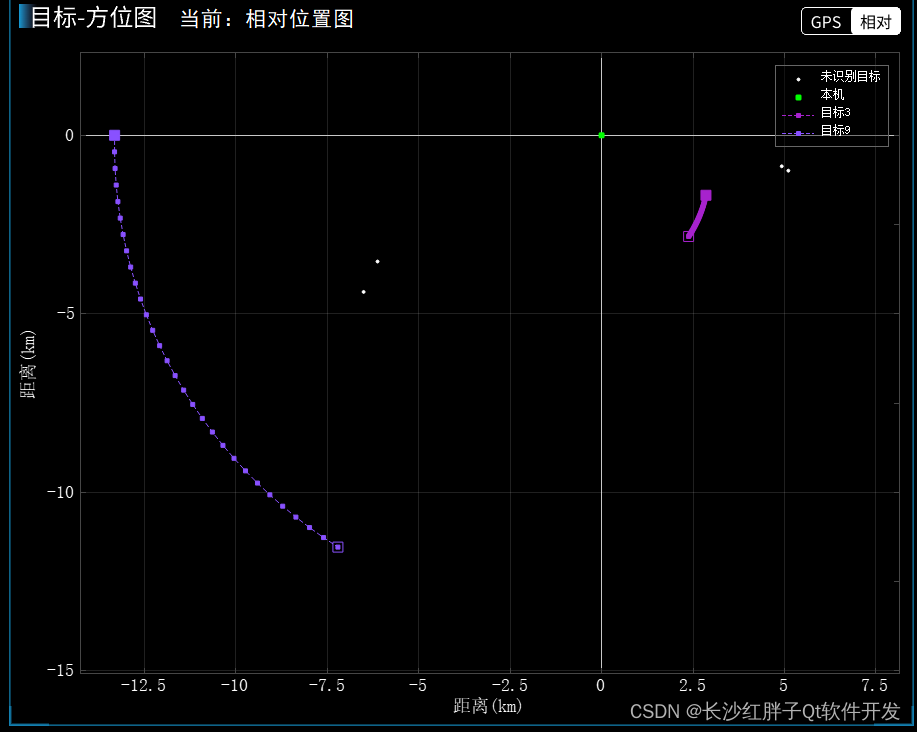
最终效果
绝对位置累计运动轨迹图:
当帧数据相对位置图:
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/136131310