Linux第51步_移植ST公司的linux内核第3步_添加修改设备树
1、设备树文件的路径
1)、创建linux中的设备树头文件
在“my_linux/linux-5.4.31/arch/arm/boot/dts/”目录中,以“stm32mp15xx-edx.dtsi”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dtsi”,这就是我们开发板的设备树头文件。
2)、创建linux中的设备树文件
在“my_linux/linux-5.4.31/arch/arm/boot/dts/”目录中,以“stm32mp157d-ed1.dts”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dts”,这就是我们开发板的设备树文件。
2、添加设备树
1)、打开终端
输入“ls回车”
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd atk-mp1/回车”,切换到“atk-mp1”目录
输入“ls回车”,列出“atk-mp1”目录下的文件和文件夹
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd my_linux/回车”,切换到“my_linux”目录
输入“ls回车”,列出“my_linux”目录下的文件和文件夹
输入“cd linux-5.4.31/回车”,切换到“linux-5.4.31”目录
输入“ls回车”,列出“linux-5.4.31”目录下的文件和文件夹

2)、输入“cd arch/回车”,切换到“arch”目录
输入“ls回车”,列出“arch”目录下的文件和文件夹
输入“cd arm/回车”,切换到“arm”目录
输入“ls回车”,列出“arm”目录下的文件和文件夹
输入“cd boot/回车”,切换到“boot”目录
输入“ls回车”,列出“boot”目录下的文件和文件夹
输入“cd dts/回车”,切换到“dts”目录
输入“ls回车”,列出“dts”目录下的文件和文件夹
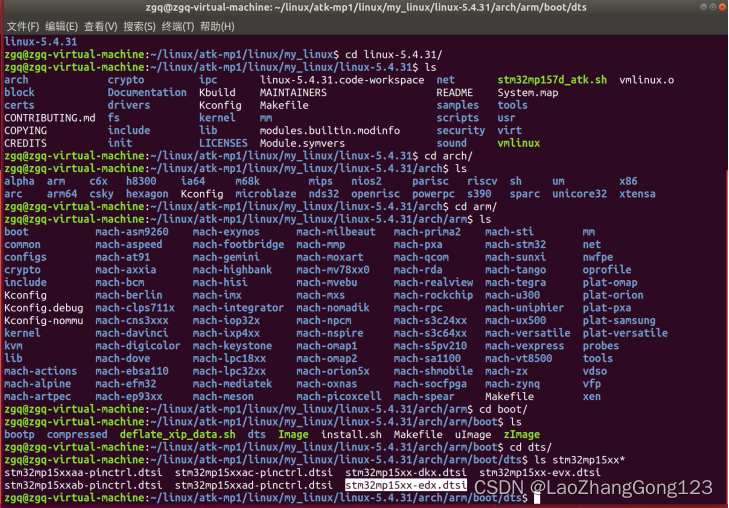
发现ST公司开发板的设备树头文件“stm32mp15xx-edx.dtsi”
3)、输入“cp stm32mp15xx-edx.dtsi stm32mp157d-atk.dtsi回车”,以“stm32mp15xx-edx.dtsi”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dtsi”
输入“ls stm32mp157d-at*回车”
输入“cp stm32mp157d-ed1.dts stm32mp157d-atk.dts回车”,以“stm32mp157c-ed1.dts”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dts”
输入“ls stm32mp157d-at*回车”

至此,设备树文件和头文件添加成功。
5、修改设备树文件“stm32mp157d-atk.dts”
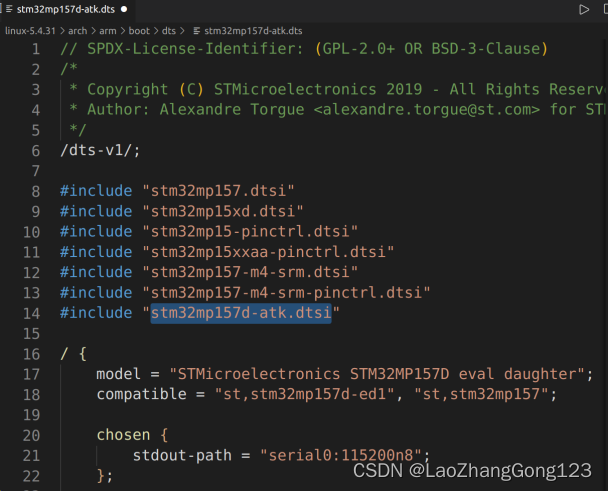
1)、使用VSCode打开“linux-5.4.31.code-workspace”,然后点击“arch”,点击“arm”,点击“boot”,点击“dts”,找到“stm32mp157d-atk.dts”,见下图:

2)、将“stm32mp15xx-edx.dtsi”修改为“stm32mp157d-atk.dtsi”,
见下图:
6、修改设备树头文件“stm32mp157d-atk.dtsi”
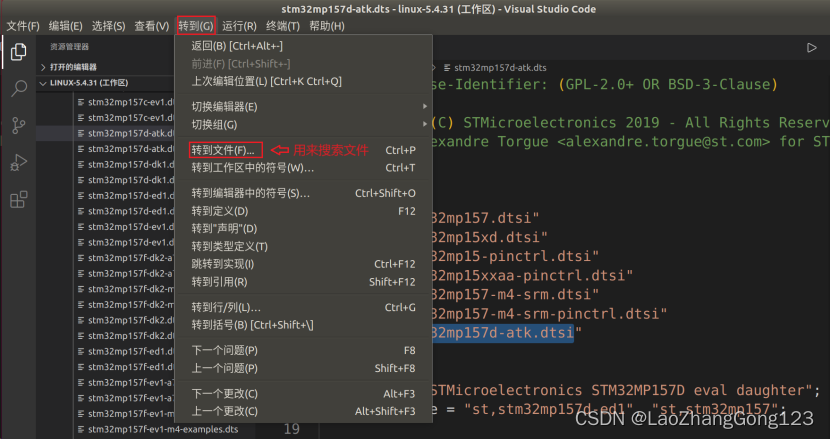
1)、使用VSCode打开“linux-5.4.31.code-workspace”
点击“转到”,点击“转到文件”,在搜索框中,输入“stm32mp157d-atk.dtsi”就可打开搜索到的文件;
见下图:
文件打开如下:

2)、添加头文件,内容如下:
#include "stm32mp157-m4-srm.dtsi"
#include "stm32mp157-m4-srm-pinctrl.dtsi"
见下图

3)、删除下面的“led”节点和“sd_switch”节点,见下图:

删除后,文件如下:
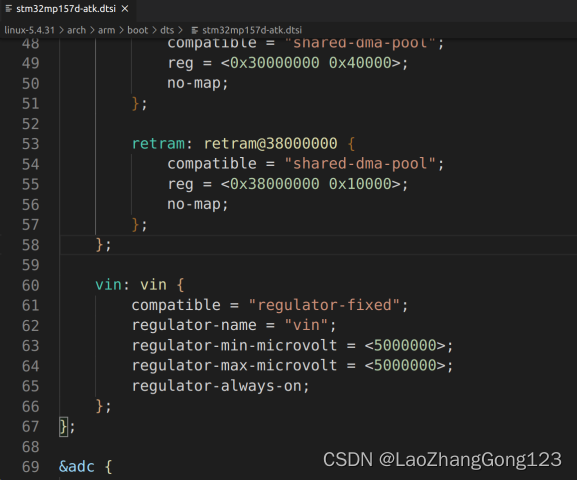
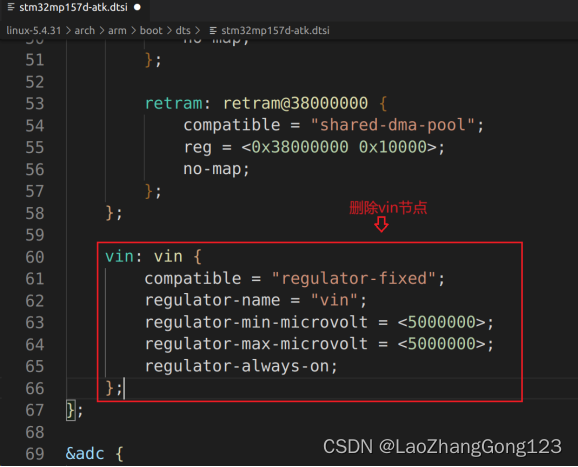
4)、删除下面的“vin”节点,见下图:
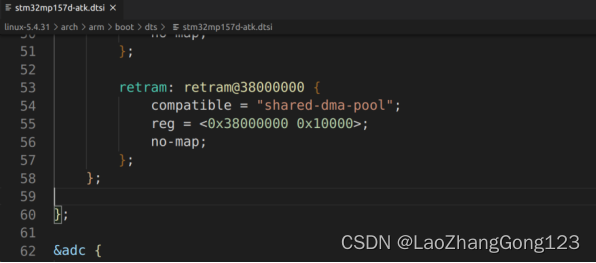
删除后,文件如下:
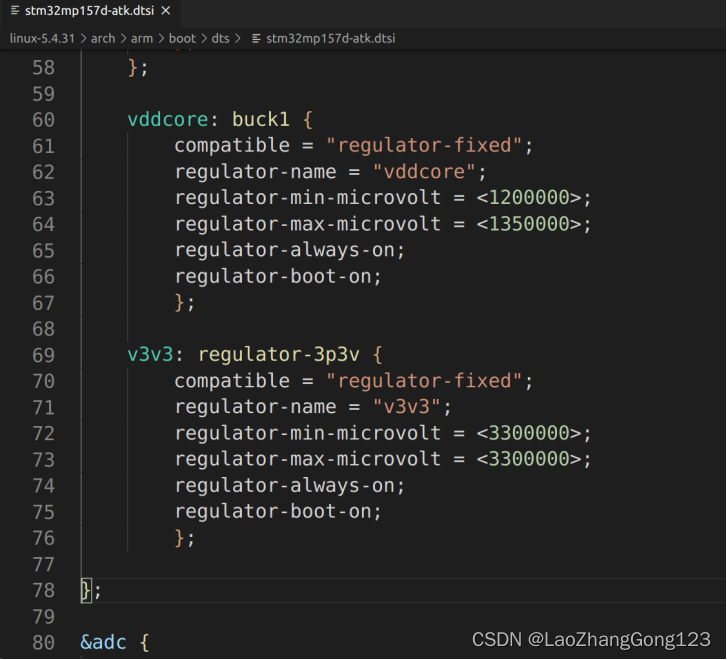
5)、在59行开始处,添加“vddcore”和“v3v3”
vddcore: buck1 {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1350000>;
regulator-always-on;
regulator-boot-on;
};
v3v3: regulator-3p3v {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
见下图:
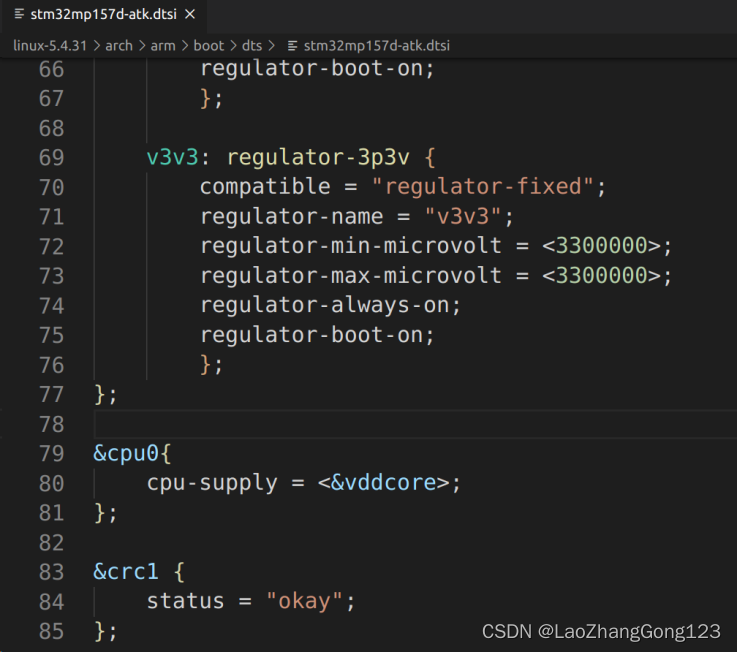
6)、删除adc节点,见下图:

删除后,文件如下:
7)、删除dac节点

删除后文件如下:
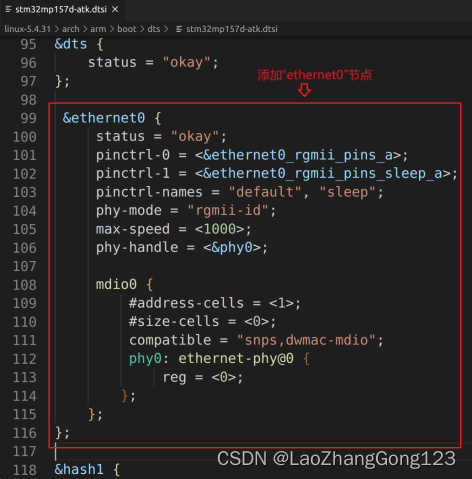
8)、添加“ethernet0”节点
ðernet0 {
status = "okay";
pinctrl-0 = <ðernet0_rgmii_pins_a>;
pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0>;
mdio0 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0: ethernet-phy@0 {
reg = <0>;
};
};
};
添加“ethernet0”节点后,见下图:
9)、删除“i2c4”节点,删除后见下图:
10)、删除“m4_rproc”和“pwr_regulators”,见下图:
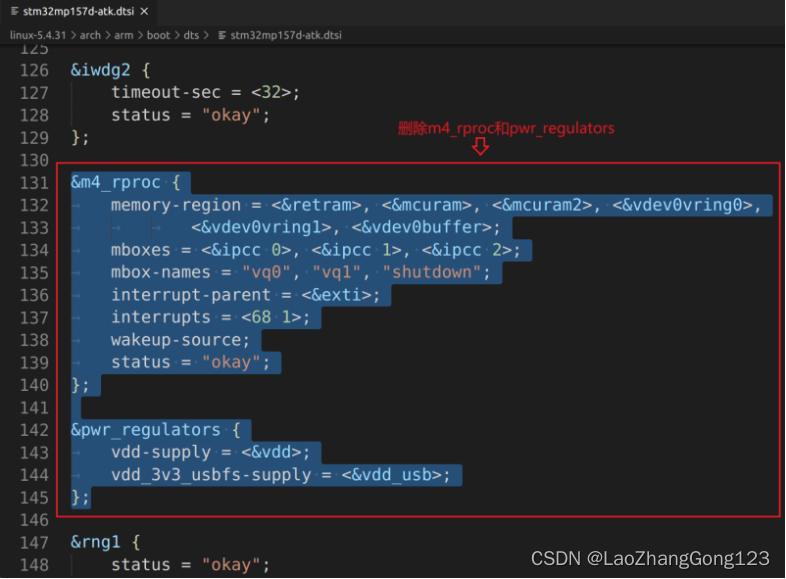
删除后,见下图:
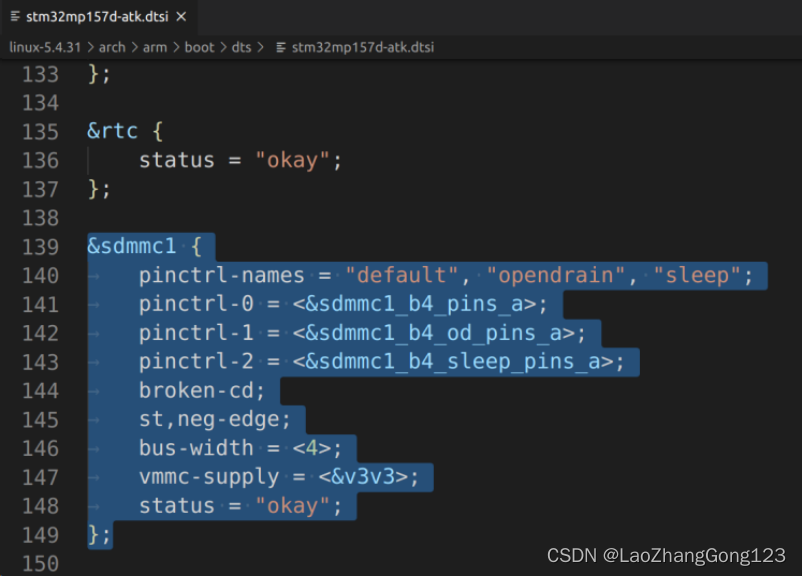
11)、使用下面的内容替换sdmmc1节点
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
broken-cd;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
替换sdmmc1节点后,见下图:
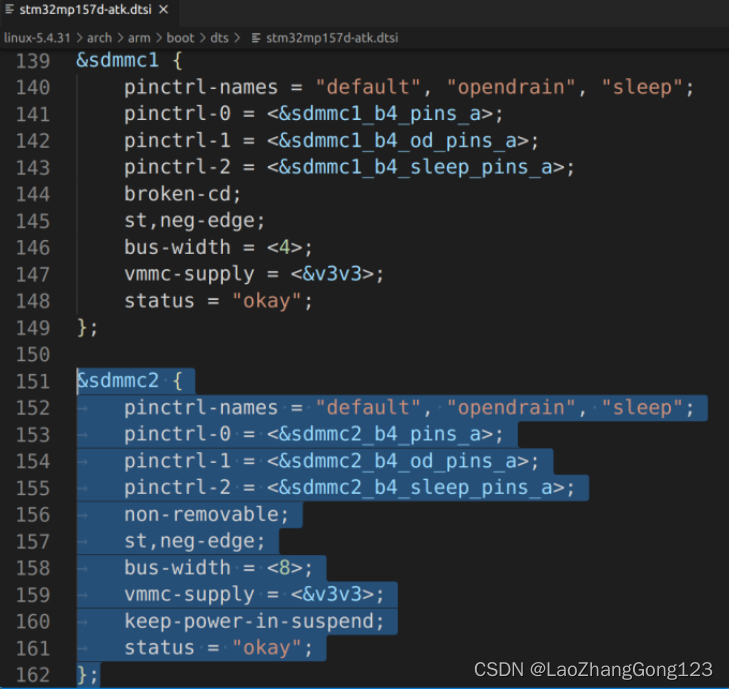
12)、使用下面的内容替换“sdmmc2”
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a>;
non-removable;
st,neg-edge;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
status = "okay";
};
替换后,见下图:
13)、删除“timers6”节点

删除“timers6”节点后,见下图:
14)、删除“usbotg_hs”,“usbphyc_port0”和“usbphyc_port1”
/* Copyright (C) STMicroelectronics 2017 - All Rights Reserved
* Author: Ludovic Barre <ludovic.barre@st.com> for STMicroelectronics.
*/
#include "stm32mp157-m4-srm.dtsi"
#include "stm32mp157-m4-srm-pinctrl.dtsi"
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/mfd/st,stpmic1.h>
/ {
memory@c0000000 {
device_type = "memory";
reg = <0xC0000000 0x40000000>;
};
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
mcuram2: mcuram2@10000000 {
compatible = "shared-dma-pool";
reg = <0x10000000 0x40000>;
no-map;
};
vdev0vring0: vdev0vring0@10040000 {
compatible = "shared-dma-pool";
reg = <0x10040000 0x1000>;
no-map;
};
vdev0vring1: vdev0vring1@10041000 {
compatible = "shared-dma-pool";
reg = <0x10041000 0x1000>;
no-map;
};
vdev0buffer: vdev0buffer@10042000 {
compatible = "shared-dma-pool";
reg = <0x10042000 0x4000>;
no-map;
};
mcuram: mcuram@30000000 {
compatible = "shared-dma-pool";
reg = <0x30000000 0x40000>;
no-map;
};
retram: retram@38000000 {
compatible = "shared-dma-pool";
reg = <0x38000000 0x10000>;
no-map;
};
};
vddcore: buck1 {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1350000>;
regulator-always-on;
regulator-boot-on;
};
v3v3: regulator-3p3v {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
};
&cpu0{
cpu-supply = <&vddcore>;
};
&crc1 {
status = "okay";
};
&dma1 {
sram = <&dma_pool>;
};
&dma2 {
sram = <&dma_pool>;
};
&dts {
status = "okay";
};
ðernet0 {
status = "okay";
pinctrl-0 = <ðernet0_rgmii_pins_a>;
pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0>;
mdio0 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0: ethernet-phy@0 {
reg = <0>;
};
};
};
&hash1 {
status = "okay";
};
&ipcc {
status = "okay";
};
&iwdg2 {
timeout-sec = <32>;
status = "okay";
};
&rng1 {
status = "okay";
};
&rtc {
status = "okay";
};
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
broken-cd;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a>;
non-removable;
st,neg-edge;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
status = "okay";
};
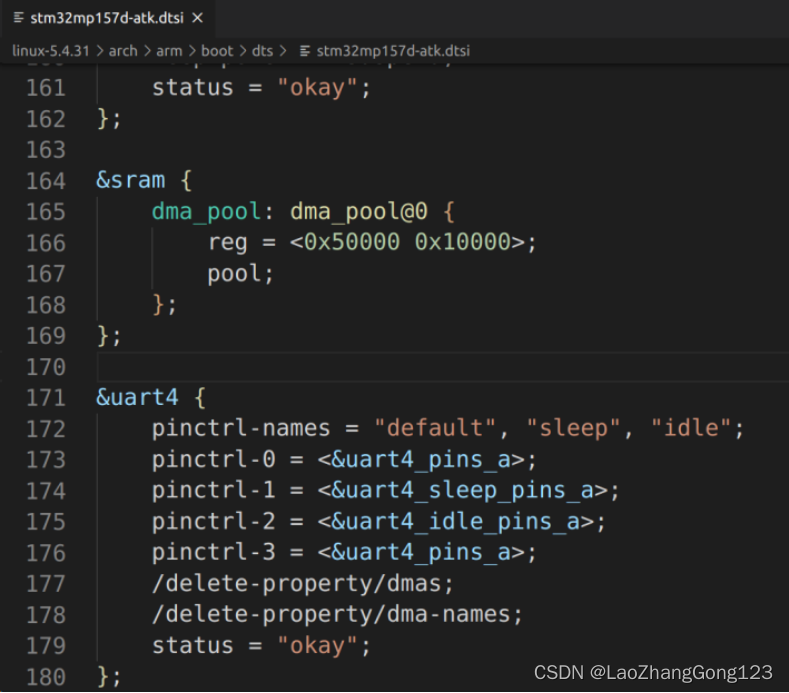
&sram {
dma_pool: dma_pool@0 {
reg = <0x50000 0x10000>;
pool;
};
};
&uart4 {
pinctrl-names = "default", "sleep", "idle";
pinctrl-0 = <&uart4_pins_a>;
pinctrl-1 = <&uart4_sleep_pins_a>;
pinctrl-2 = <&uart4_idle_pins_a>;
pinctrl-3 = <&uart4_pins_a>;
/delete-property/dmas;
/delete-property/dma-names;
status = "okay";
};
7、修改“arch/arm/boot/dts/”目录中的“Makefile”
1)、打开“arch/arm/boot/dts/Makefile”,找到“dtb-$(CONFIG_ARCH_STM32)”配置项。
2)、添加配置项“stmm32mp157d-atk.dtb”,修改后,见下图:
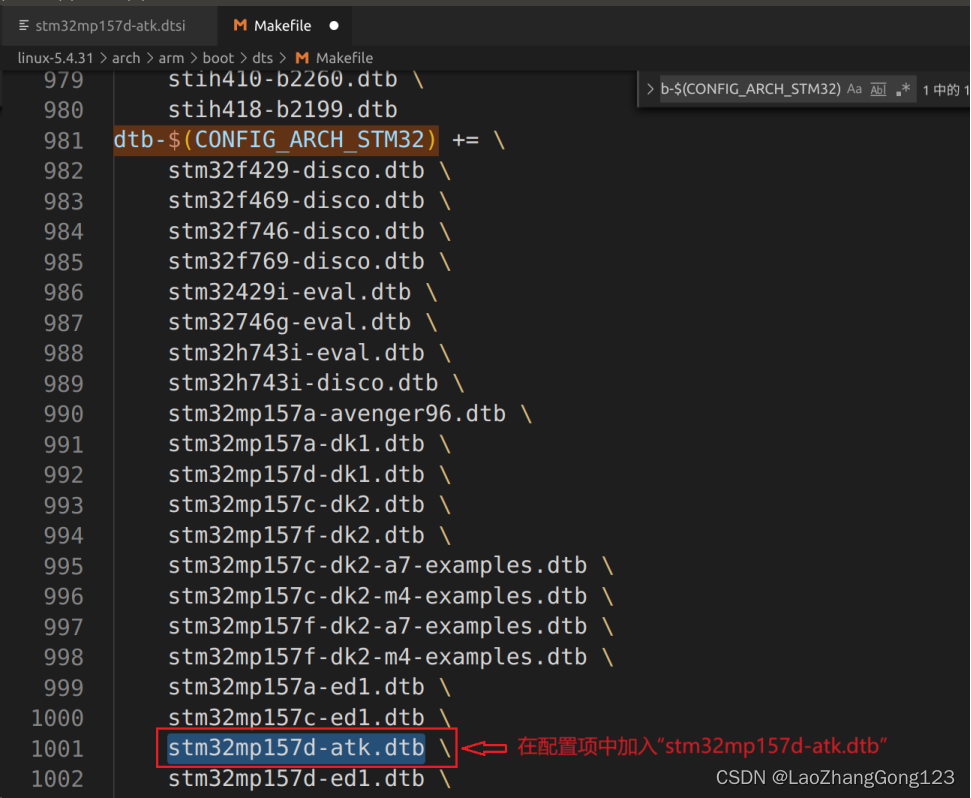
3)、保存“arch/arm/boot/dts/”目录中的“Makefile”。