睿尔曼超轻量仿人机械臂—外置按钮盒使用说明

睿尔曼RM系列机械臂的控制方式有很多种,包括:示教器、JSON、API等。在此为大家介绍外置按钮盒的使用方法。
按钮盒接线安装
按钮盒外观如下图所示,有:急停、暂停、开始、继续。四个功能按钮。用户可通过这四个按钮来实现对机械臂运动程序的控制。

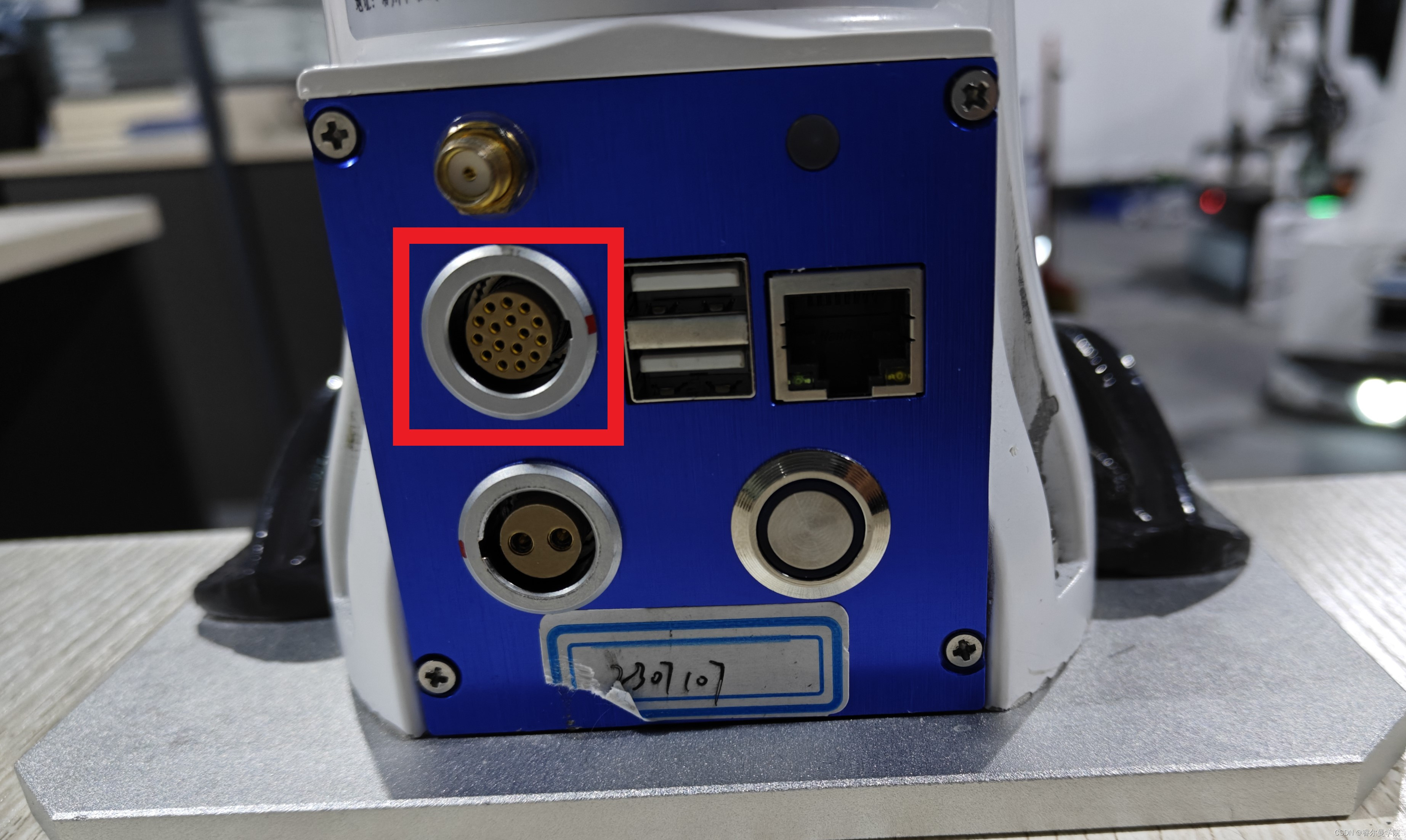
按钮盒与机械臂之间通过16芯线连接,按钮盒基于IO复用与机械臂进行通信。机械臂上的16芯线接口位于基座后方,图中红框所示:
将接上的十六芯线剥开,按照下表接线:
| 功能键↓ | 23端 | 24端 |
| 急停 | 紫白线 | 灰线+深蓝线 |
| 暂停 | 红白线 | 灰线+深蓝线 |
| 开始 | 绿白线 | 灰线+深蓝线 |
| 继续 | 黄白线 | 灰线+深蓝线 |
接线完成后如下图所示:

接线时请注意:
①灰色和深蓝色线需要短接后再接入按钮引脚;
②需要额外将棕色线与蓝白色线短接后悬空并且做好绝缘处理。
按钮盒IO配置
按钮盒接线完成后,需要连接机械臂,打开示教器界面,对其进行配置。
示教器页面进入方式可参照:睿尔曼超轻量仿人机械臂--示教器简介&使用 。三代机械臂可以通过web端任意浏览器输入网址登录。使用有线连接时,网址输入 192.168.1.18 进入登录页,输入账号:user,密码:123,点击登录即可进入示教器界面。

依次点击:配置-机械臂配置-IO设置 进入下图页面:
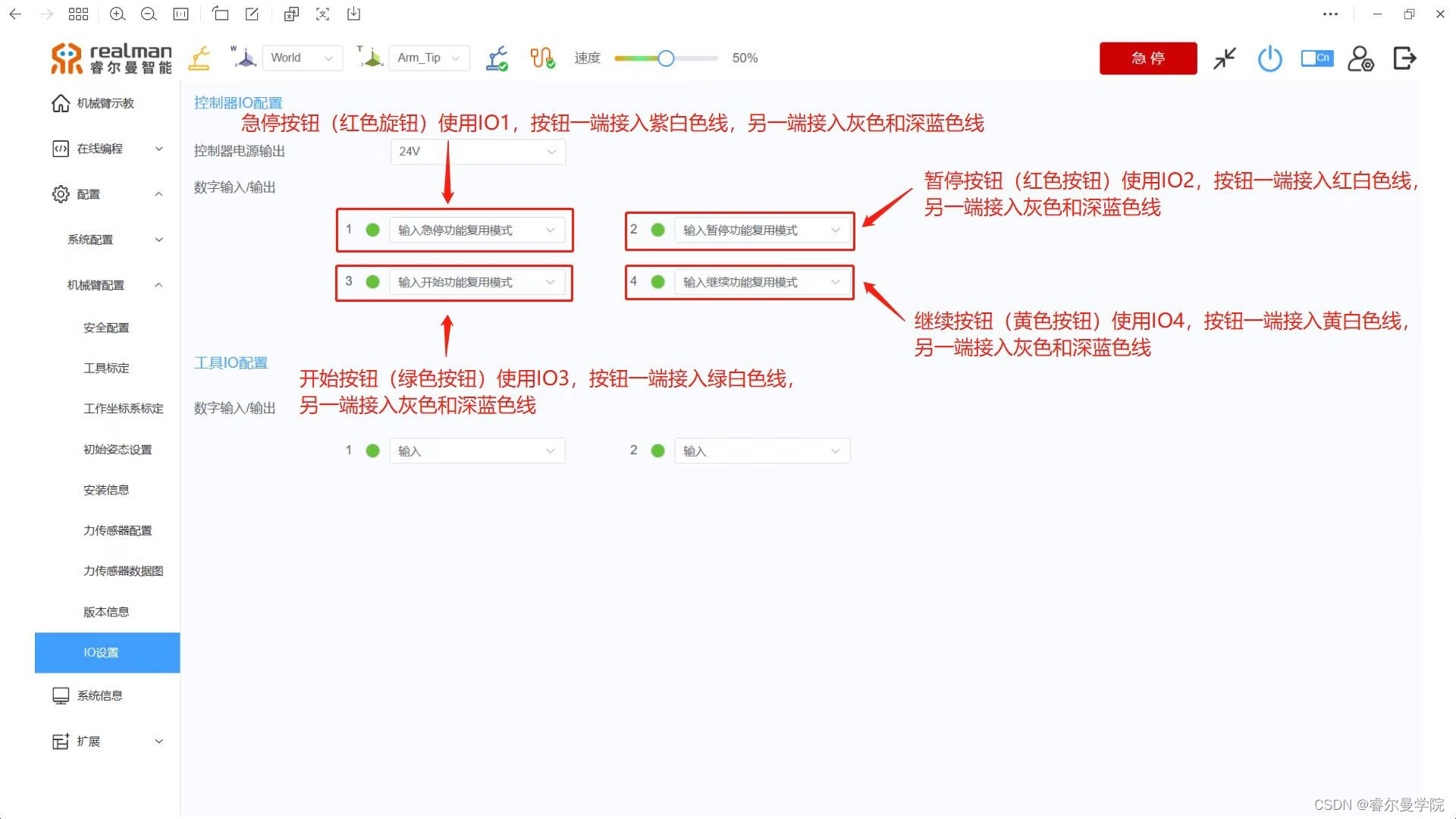
按照以下配置选择:
1:输入急停功能复用模式;
2:输入暂停功能复用模式;
3:输入开始功能复用模式;
4:输入继续功能复用模式。
如上配置完成后,外置按钮盒的输入就能够对机械臂运动程序的启停进行控制。但是要实现一键启动程序,还需要对程序进行相关的配置。
默认程序添加步骤
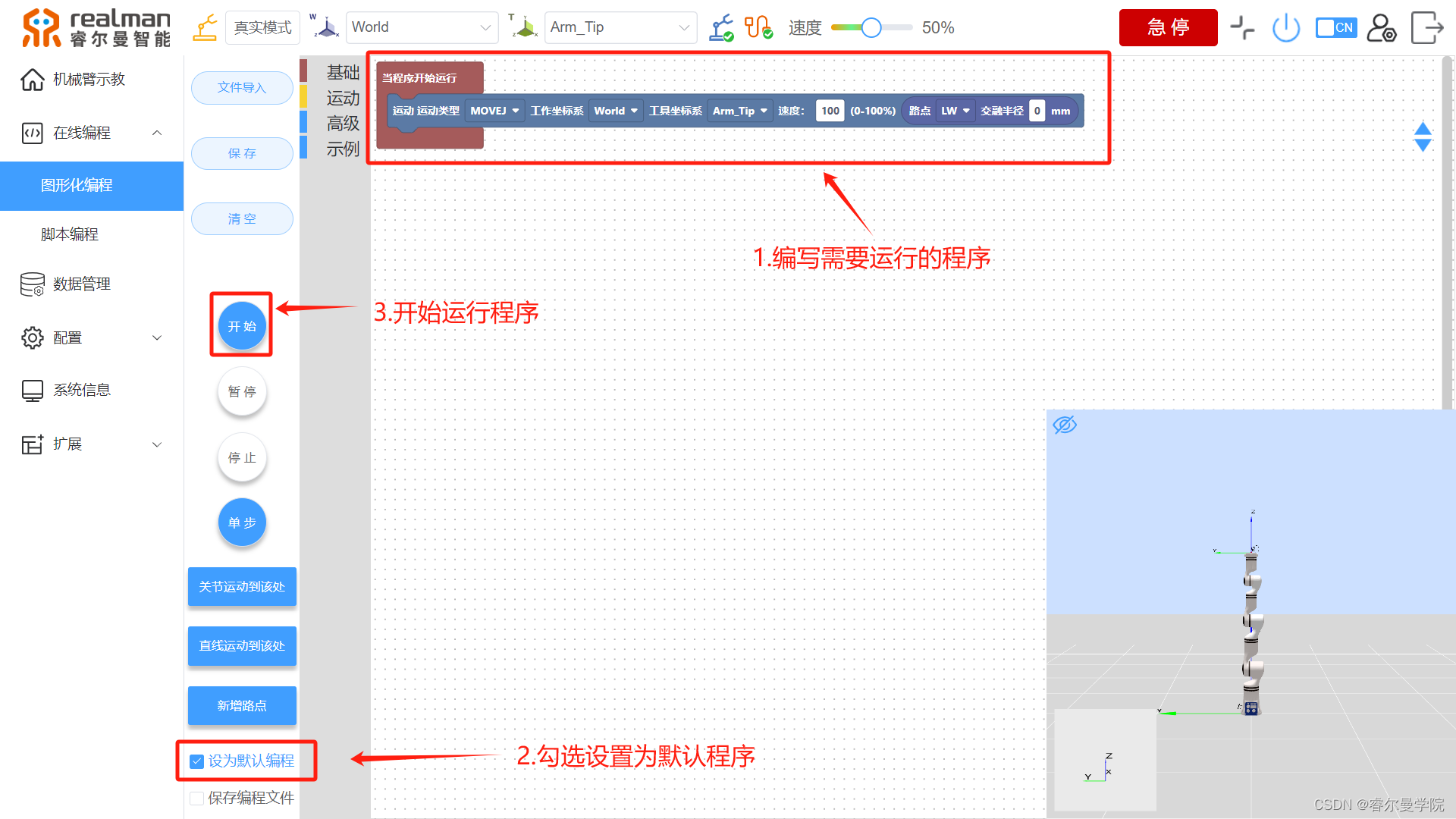
首先,在示教器中编写一段程序,而后在选项中勾选“设为默认编程”,最后点击“开始”即可运行程序。如下图所示:
故障提示
有一种情况在使用时可能发生,需要使用者注意:在急停按钮按下后,若未旋转复位急停按钮便按下开始按钮(两秒及以上),那么在急停按钮复位后,再次触发开始按钮就会导致程序只执行一部分便停下。要解除这个故障,需要先触发一次停止按钮(红色按钮),之后再次触发开始按钮,程序才可正常运行。