Docker容器引擎(3)
目录
一.Docker 镜像的创建
1.基于现有镜像创建
2.基于本地模板创建
3.基于Dockerfile创建:
Dockerfile 操作常用的指令:
ADD 和 COPY 的区别?
CMD 和 ENTRYPOINT 的区别?
容器启动命令的优先级
如何使用Dockerfile构建镜像?
yum构建nginx的dockerfile:
编写dockerfile文件:
进入容器进行添加网页内容:
我们为了方便不进入容器就能修改添加网页内容可以做数据卷:
一.Docker 镜像的创建
创建镜像有三种方法,分别为基于已有镜像创建、基于本地模板创建以及基于Dockerfile创建。
1.基于现有镜像创建
docker create -it centos:7 /bin/bash


然后将修改后的容器提交为新的镜像,需要使用该容器的 ID 号创建新镜像:
docker commit -m "new" -a "centos" 5590537ebe36 centos:test
-m 说明信息;
-a 作者信息;
-p 生成过程中停止容器的运行。


2.基于本地模板创建
先获取模板文件 :将本地容器导出为模板文件 docker export 或从网上下载现成的模板文件:


再将模板文件导入成镜像 :docker import

3.基于Dockerfile创建:
UnionFS(联合文件系统):Union文件系统(UnionFS)是一种分层、轻量级并且高性能的文件系统,它支持对文件系统的修改作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下。AUFS、OverlayFS 及 Devicemapper 都是一种 UnionFS。
Docker的镜像实际上由一层一层的文件系统组成,这种层级的文件系统就是UnionFS。
bootfs主要包含bootloader和kernel,bootloader主要是引导加载kernel,Linux刚启动时会加载bootfs文件系统。
Dockerfile 操作常用的指令:
FROM 指定基础镜像(是Dockerfile的第一行指令)
MAINTAINER 指定镜像维护人信息(可选)
RUN 指定linux命令,尽量将多条linux命令合并在一个RUN指令里,用 ; 或 && 或 <<EOF 串起来使用
EXPOSE 指定容器要开启的应用的端口号
ENV 指定容器的环境变量
ADD/COPY 复制本地文件|目录到镜像里
VOLUME 指定容器的匿名数据卷(作用类似于 docker run -v /var/lib/docker/volumes/容器ID/:容器数据卷目录)
USER 指定容器的运行用户
WORKDIR 指定后续镜像层的工作目录
ARG 指定构建镜像时传入的参数变量(可通过 "docker build --build-arg 变量=值" 进行传入参数)
CMD/ENTRYPOINT 指定容器启动时执行的命令和参数
ADD 和 COPY 的区别?
共同点:都可以将本地的文件|目录复制到镜像里
区别:ADD还可以通过URL地址下载文件并复制到镜像里,还能将本地的压缩包解压后再复制到镜像里(URL下载和压缩包解压特性不能同时生效)
即通过URL下载的压缩包只能以压缩包的形式复制到镜像里
CMD 和 ENTRYPOINT 的区别?
共同点:都可以用来指定容器的启动命令
区别:ENTRYPOINT指定的容器启动命令优先级更高,如果CMD和ENTRYPOINT同时存在,那么CMD指定的内容将作为ENTRYPOINT指定的容器启动命令的选项或参数使用
容器启动命令的优先级
docker run --entrypoint="命令" > 镜像里的ENTRYPOINT指令指定的"命令" > docker run .... 镜像 "命令" > 镜像里的CMD指令指定的"命令"
如何使用Dockerfile构建镜像?
1)编写Dockerfile文件,在第一行用 FROM 指令指定基础镜像
2)用 MAINTAINER 指令指定镜像维护人信息(可选)
3)用 RUN EXPOSE ENV ADD COPY 等指令编写构建镜像的过程
4)在Dockerfile结尾用 CMD 或 ENTRYPOINT 指令指定容器启动时执行的命令
5)用 docker build -t 镜像名:标签 . 命令来构建镜像
yum构建nginx的dockerfile:
先创建目录:
编写dockerfile脚本:

给目录下添加nginxyum源:
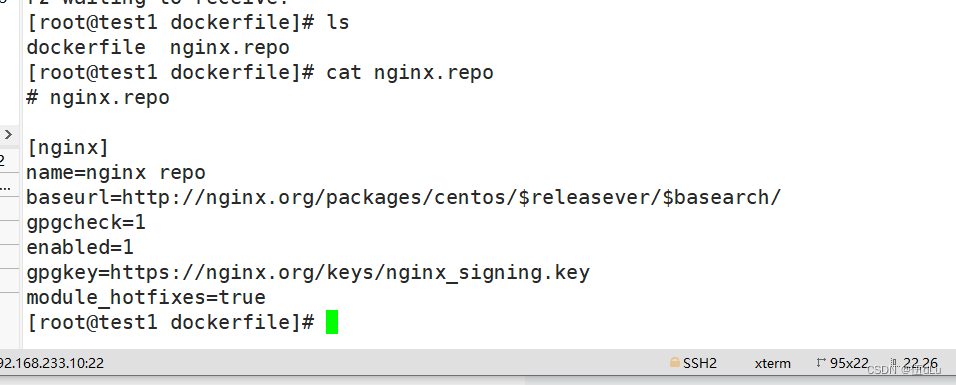
[nginx]
name=nginx repo
baseurl=http://nginx.org/packages/centos/$releasever/$basearch/
gpgcheck=1
enabled=1
gpgkey=https://nginx.org/keys/nginx_signing.key
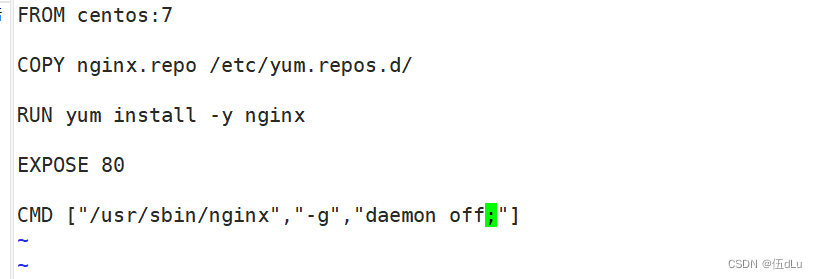
module_hotfixes=true编写dockerfile文件:

FROM centos:7COPY nginx.repo /etc/yum.repos.d/RUN yum install -y nginxEXPOSE 80CMD ["/usr/sbin/nginx","-g","daemon off;"]
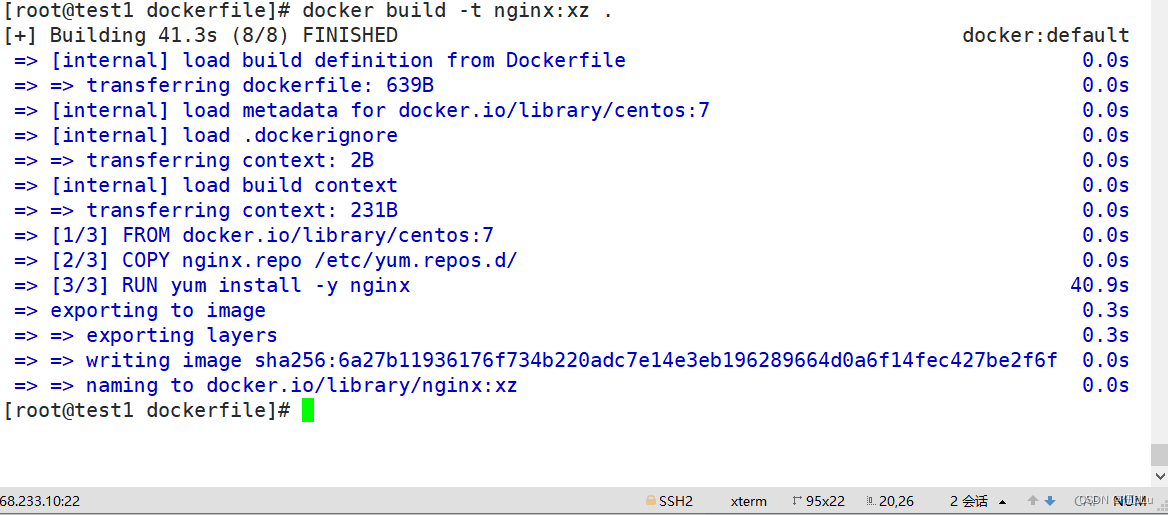
生成镜像:
docker build -t 镜像名:标签 . :注意别忘了末尾有"."

查看下镜像:

新镜像运行容器:

访问网页:
如果有网络报错提示:[Warning] IPv4 forwarding is disabled. Networking will not work
解决方法:
vim /etc/sysctl.conf
net.ipv4.ip_forward=1
sysctl -p
systemctl restart network
systemctl restart docker
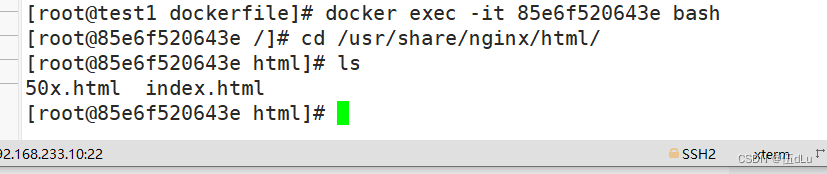
进入容器进行添加网页内容:

访问页面:

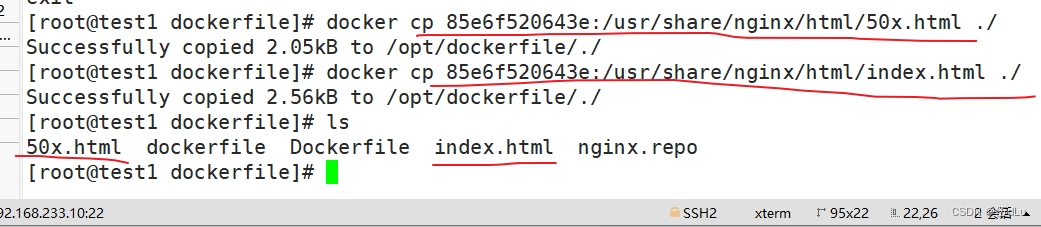
我们为了方便不进入容器就能修改添加网页内容可以做数据卷:
先将容器中的网页文件复制到宿主机目录下:


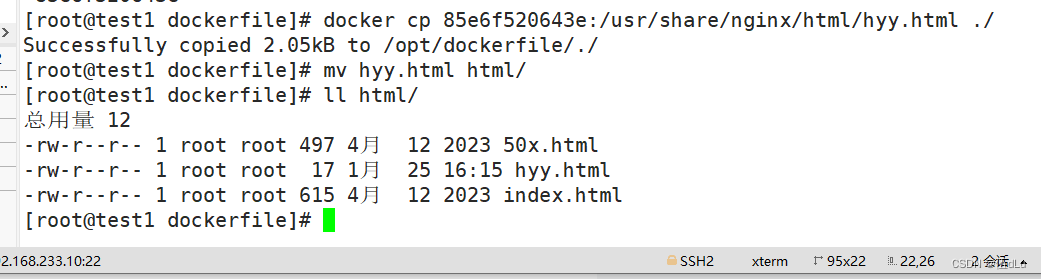
创建容器:


修改内容:

访问页面:
