超维空间M1无人机使用说明书——21、基于opencv的人脸识别
引言:M1型号无人机不仅提供了yolo进行物体识别,也增加了基于opencv的人脸识别功能包,仅需要启动摄像头和识别节点即可
链接: 源码链接
一、一键启动摄像头和人脸识别节点
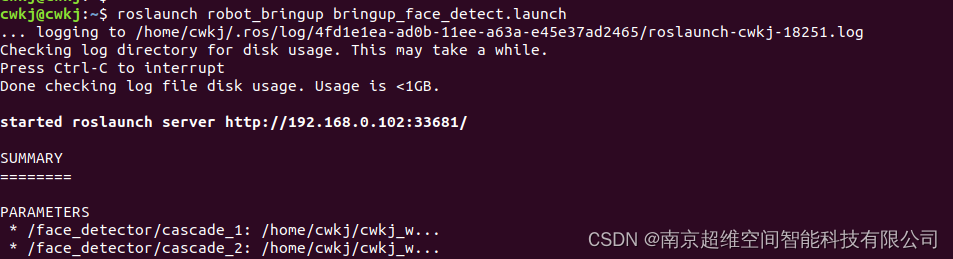
roslaunch robot_bringup bringup_face_detect.launch
无报错,出现以下界面表示启动成功。

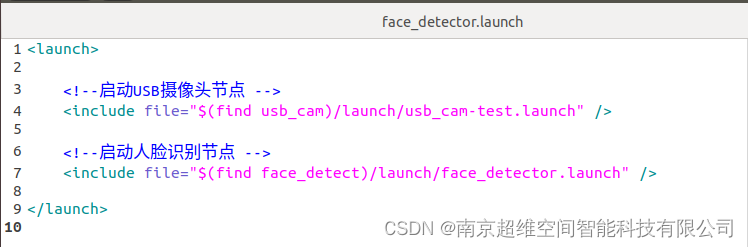
launch文件详解
二、查看摄像头的图像
为了节约资源,默认关闭了图像显示框,如果需要查看相关图像信息,可以通过rqt工具查看图像信息
步骤一、终端输入:
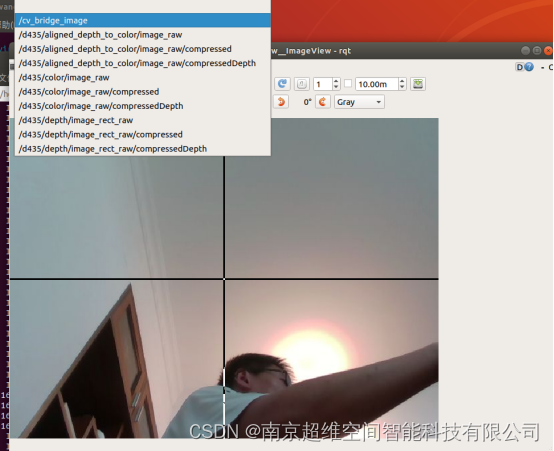
rqt_image_view
注意:再出现以上图框的时候,选择/cv_bridge_image作为订阅的话题
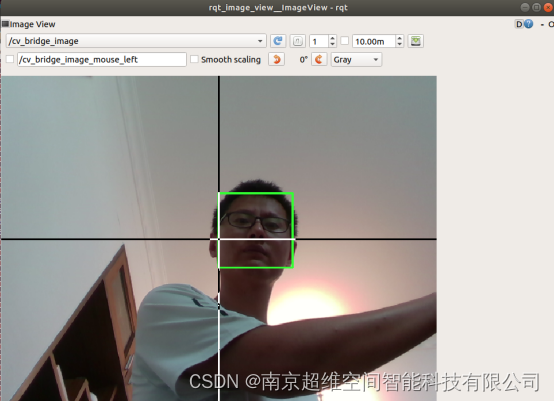
步骤二、查看人脸识别效果
当人脸出现在摄像头的视野范围内,人脸部分将会被框选出来。