虹科方案丨L2进阶L3,数据采集如何助力自动驾驶
来源:康谋自动驾驶 虹科方案丨L2进阶L3,数据采集如何助力自动驾驶
原文链接:https://mp.weixin.qq.com/s/qhWy11x_-b5VmBt86r4OdQ
欢迎关注虹科,为您提供最新资讯!
12月14日,宝马集团宣布,搭载L3级别自动驾驶功能的车辆在上海市正式获得高快速路自动驾驶测试牌照。宝马表示,将在上海市政府的监督和指导下,在指定区域开展L3高快速路自动驾驶道路测试。
技术方案上,宝马的自动驾驶研究一直坚持多传感器融合的方式,其L3级自动驾驶技术套件能够集成更多高性能传感器,例如新的激光雷达系统,并将所有传感器信息与长距离雷达、前置摄像头数据相互关联,建立起L3自动驾驶车辆完整的环境模型。

在自动驾驶和人工智能领域,宝马与b-plus和Digitalwerk展开通力合作。上图是搭载了b-plus数采设备的宝马数采车,数采方案包括10个摄像头、1个激光雷达以及4个短距离角雷达。其中,DATALynx ATX4高性能车载服务器和BRICK2测量平台构成一流的数据采集方案,具备对不同传感器接口和协议的支持,适用于高带宽和高性能的场景。

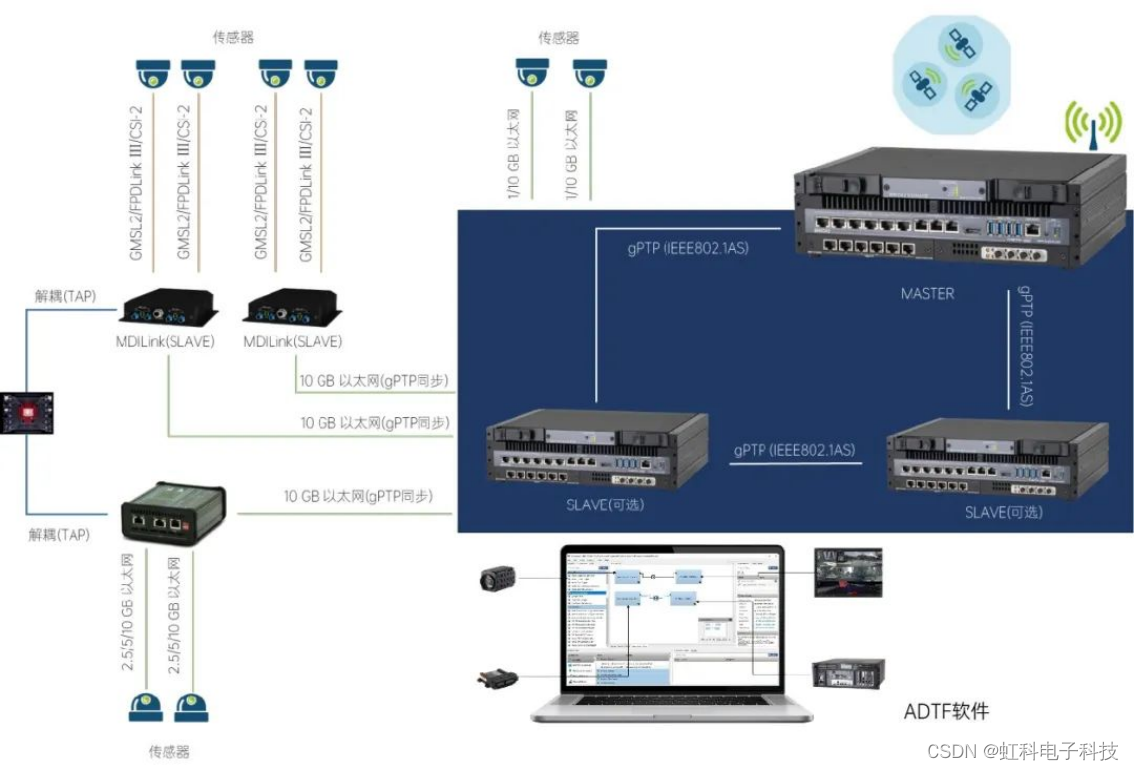
宝马数采车硬件系统方案
如图所示,方案通过交换器连接了各类摄像头(包括8个M12/Eth接口摄像头、1个Stereo摄像头以及1个Thermal摄像头)、激光雷达、IMU、Gateway等设备,实现了对采集数据的同时分发,将数据传输至ATX4和BRICK2设备。ATX4和BRICK2均可灵活拓展多种接口,通过扩展的CAN接口成功采集了4个短距离角雷达的数据。

通过以上连接,能够实现对各类传感器数据的高带宽采集,以及数据的时间同步。这些数据同时传入ATX4和BRICK2设备,ATX4搭载高性能算力,可进一步对采集的数据进行运算和测试。这套完善的解决方案能够满足自动驾驶数据采集的需求。
康谋数据采集方案
随着自动驾驶技术的发展,智能汽车行业竞争进入下半场,L2.99已不足以满足市场需求,急需L3及以上的创新突破。
针对自动驾驶数采数据量巨大和时间同步的关键挑战,康谋联合b-plus、Digitalwerk提供一体化的解决方案,覆盖了从前端传感器原始数据的初始解耦到传感器数据的时间同步和可靠分发,再到车辆内部的实时分析,最终到数据中心的存储与后处理的全流程。