RM3100 stm32驱动(硬件i2c)
目录
- RM3100接线
- HAL库I2C函数
- HAL_I2C_Mem_Read
- HAL_I2C_Mem_Write
- HAL_I2C_Master_Transmit / HAL_I2C_Master_Receive
- 例子 HSHAKE寄存器
- cubemx配置
- RM3100寄存器
- 驱动
- 最终效果
RM3100接线
原理图

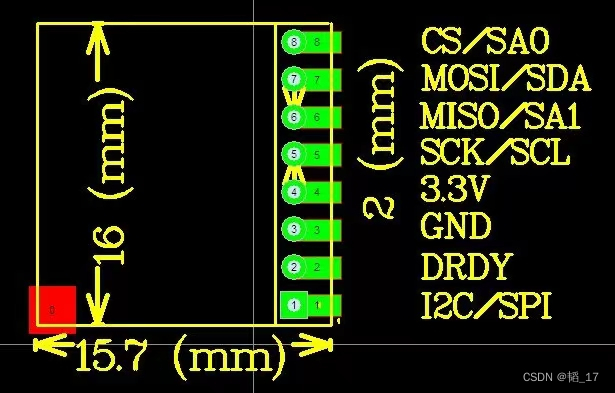
SA0 SA1接地,此时i2c设备地址为0100000,即0x20
如果SA0接高,SA1接地,地址为0100001,即0x21
如果SA0接地,SA1接高,地址为0100010,即0x22
SDA SCL正常接单片机,要上拉
I2C/SPI接高,选择I2C模式
手册下载链接
HAL库I2C函数
stm32 hal库对于i2c的操作有几个函数:
HAL_I2C_Mem_Read
hi2c:i2cx,比如 &hi2c1
DevAddress:左移一位的传感器设备地址,比如RM3100原来是0x20,要输入(0x20<<1)即0x40
MemAddress:要读取的寄存器地址,这个不用左移,按照手册里面即可,比如HSHAKE寄存器就是0x35
MemAddSize:一般I2C_MEMADD_SIZE_8BIT
后面几个正常写即可,pData传指针把读出来数据传递出来,比如HSHAKE寄存器(0x35)读出来就是0x1B
/*** @brief Read an amount of data in blocking mode from a specific memory address* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param MemAddress Internal memory address* @param MemAddSize Size of internal memory address* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_I2C_Mem_Write
和上面类似,不同的是pData 变成了往里面写的数据
/*** @brief Write an amount of data in blocking mode to a specific memory address* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param MemAddress Internal memory address* @param MemAddSize Size of internal memory address* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_I2C_Master_Transmit / HAL_I2C_Master_Receive
这俩成对用,可以看到他俩都么有MemAddress
先调用HAL_I2C_Master_Transmit,pData写成MemAddress地址,再调用HAL_I2C_Master_Receive收数据
/*** @brief Transmits in master mode an amount of data in blocking mode.* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout)
/*** @brief Receives in master mode an amount of data in blocking mode.* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout)
例子 HSHAKE寄存器
两种写法,data即为读出来数据,应该是0x1B
uint8_t data=0;
HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_HSHAKE,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);
uint8_t data=0;
uint8_t addr_hshake=ADDR_HSHAKE;//0x35
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&RM3100_I2C,RM3100_ADDRESS,&addr_hshake,1,1000); //addr_hshake要写成目标寄存器地址
status = HAL_I2C_Master_Receive(&RM3100_I2C,(RM3100_ADDRESS|1),&data,1,1000);
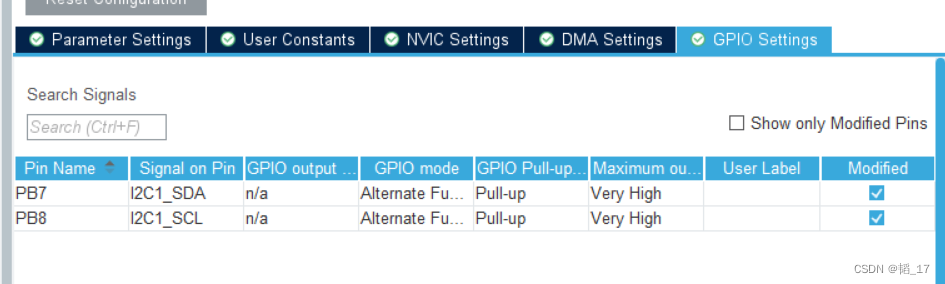
cubemx配置
正常使用I2C即可,选择fast mode,最高400k可以工作
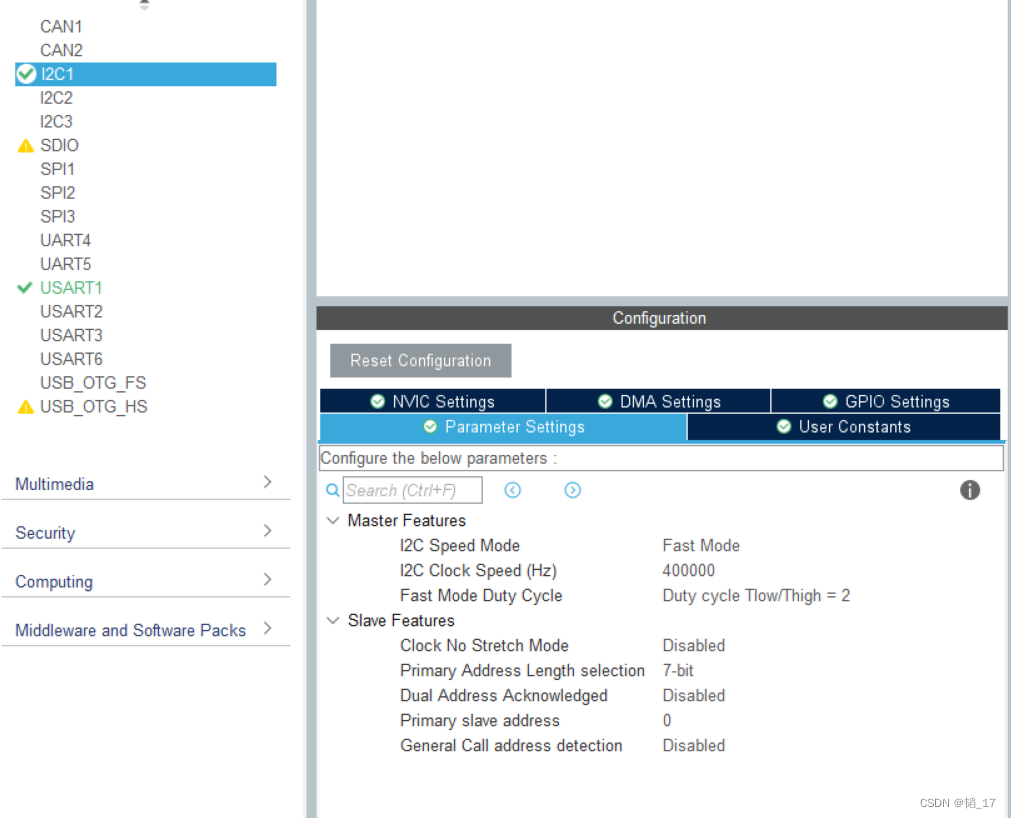
需要上拉,最好硬件上也拉一下
RM3100寄存器
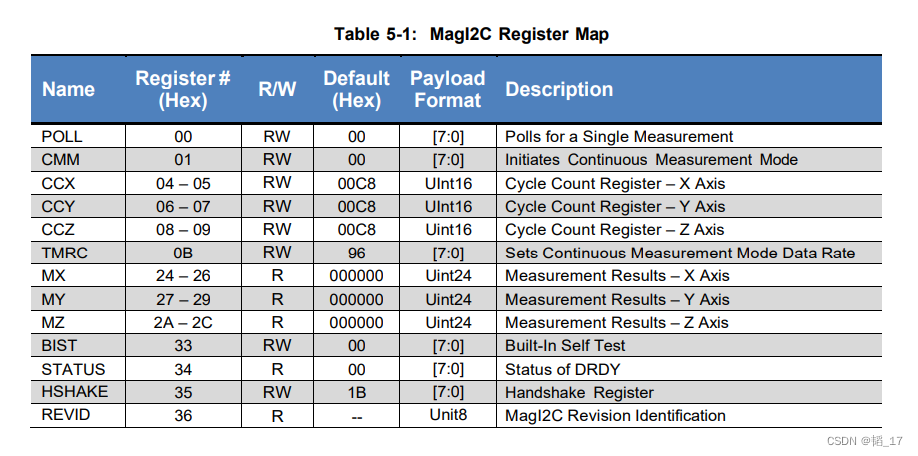
上面提示了对于I2C,读写地址不一样,因为有一位0/1标志着读/写,但是不用管,hal库帮我们搞好了,直接对着第二列填MemAddress即可

驱动
采用poll写法,参考手册5.3 5.8 5.8.2
.h文件
#ifndef __RM3100_H
#define __RM3100_H
#include "main.h"
#include "i2c.h"#define RM3100_I2C hi2c1
#define RM3100_ADDRESS 0x20<<1 //AD0 AD1都接地#define RM3100_CONVERSION_INTERVAL 10000 // Microseconds, corresponds to 100 Hz (cycle count 200 on 3 axis)
#define UTESLA_TO_GAUSS 100.0f
#define RM3100_SENSITIVITY 75.0f#define ADDR_POLL 0x00
#define ADDR_CMM 0x01
#define ADDR_CCX 0x04
#define ADDR_CCY 0x06
#define ADDR_CCZ 0x08
#define ADDR_TMRC 0x0B
#define ADDR_MX 0x24
#define ADDR_MY 0x27
#define ADDR_MZ 0x2A
#define ADDR_BIST 0x33
#define ADDR_STATUS 0x34
//#define ADDR_STATUS_READ 0xB4 //0X34|0X80
#define ADDR_HSHAKE 0x35
#define ADDR_REVID 0x36#define CCX_DEFAULT_MSB 0x00
#define CCX_DEFAULT_LSB 0xC8
#define CCY_DEFAULT_MSB CCX_DEFAULT_MSB
#define CCY_DEFAULT_LSB CCX_DEFAULT_LSB
#define CCZ_DEFAULT_MSB CCX_DEFAULT_MSB
#define CCZ_DEFAULT_LSB CCX_DEFAULT_LSB
#define CMM_DEFAULT 0x70 // No continuous mode
#define CONTINUOUS_MODE (1 << 0)
#define POLLING_MODE (0 << 0)
#define TMRC_DEFAULT 0x94
#define BIST_SELFTEST 0x8F
#define BIST_DEFAULT 0x00
#define BIST_XYZ_OK ((1 << 4) | (1 << 5) | (1 << 6))
#define STATUS_DRDY (1 << 7)
#define POLL_XYZ 0x70
#define RM3100_REVID 0x22#define NUM_BUS_OPTIONS (sizeof(bus_options)/sizeof(bus_options[0]))uint8_t RM3100ReadID(void);
uint8_t RM3100_Init(void);
uint8_t RM3100_GetData(short *x,short *y,short*z);
uint8_t RM3100_CheckDataReady(void);
#endif.c文件
#include "RM3100.h"uint8_t RM3100ReadID(void){uint8_t data=0;uint8_t addr_hshake=ADDR_HSHAKE;
// HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_HSHAKE,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&RM3100_I2C,RM3100_ADDRESS,&addr_hshake,1,1000); //addr_hshake要写成目标寄存器地址status = HAL_I2C_Master_Receive(&RM3100_I2C,(RM3100_ADDRESS|1),&data,1,1000);//两种写法都可以,读取0x35寄存器值,并与1b进行比较if(status!=HAL_OK){printf("RM3100 I2C Error!\r\n");return 1;}else{if(data!=0x1B){printf("RM3100 detected Error! %x\r\n",data);return 1;}else{printf("RM3100 Address = %x\r\n",data);return 0;}}
}uint8_t RM3100_Init(void){uint8_t CCR[6] = {0, 200, 0, 200, 0, 200};if(RM3100ReadID()) {return 1;}else{HAL_StatusTypeDef status = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_CCX,I2C_MEMADD_SIZE_8BIT,CCR, 6, 1000);//发送一次poll请求,开始测量uint8_t data=POLL_XYZ;HAL_StatusTypeDef status1 = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_POLL,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);if(status!=HAL_OK | status1!=HAL_OK){printf("Error!,status=%d,status1=%d\r\n",status,status1);return 1;}else{return 0;} }
}uint8_t RM3100_CheckDataReady(void)
{uint8_t cResult;HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_STATUS,I2C_MEMADD_SIZE_8BIT,&cResult,1,1000);cResult = cResult&0x80;
// printf("%x\r\n",cResult);return cResult;
}uint8_t RM3100_GetData(short *x,short *y,short*z){static long Mag_Data[3] = {0};uint8_t temp[9]={0};uint8_t poll_request=POLL_XYZ;if(RM3100_CheckDataReady()==0x80){//data ready//读取9个字节HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_MX,I2C_MEMADD_SIZE_8BIT,temp, 9, 1000);Mag_Data[0]= (long)temp[0]<<16 | (long)temp[1]<<8 | temp[2];if(Mag_Data[0] >= 0x00800000) {Mag_Data[0] |= 0xff000000;}Mag_Data[1] = (long)temp[3]<<16 | (long)temp[4]<<8 | temp[5];if(Mag_Data[1] >= 0x00800000) {Mag_Data[1] |= 0xff000000;}Mag_Data[2] = (long)temp[6]<<16 | (long)temp[7]<<8 | temp[8];if(Mag_Data[2] >= 0x00800000) {Mag_Data[2] |= 0xff000000;}*y = -Mag_Data[0];*x = -Mag_Data[1];*z = -Mag_Data[2];//发送一次poll请求,开始测量HAL_StatusTypeDef status1 = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_POLL,I2C_MEMADD_SIZE_8BIT,&poll_request, 1, 1000);if(status!=HAL_OK | status1!=HAL_OK){printf("Error!,status=%d,status1=%d\r\n",status,status1);return 1;}else{return 0;}}else{printf("Data Not Ready!\r\n");return 1;}
}主函数:
int main(void)
{//初始化……RM3100_Init();short hx,hy,hz=0;while (1){RM3100_GetData(&hx, &hy, &hz);printf("RM3100 hx: %d, hy: %d, hz: %d\r\n", hx, hy, hz);HAL_Delay(8);}
}
其他功能没写,后面慢慢补上
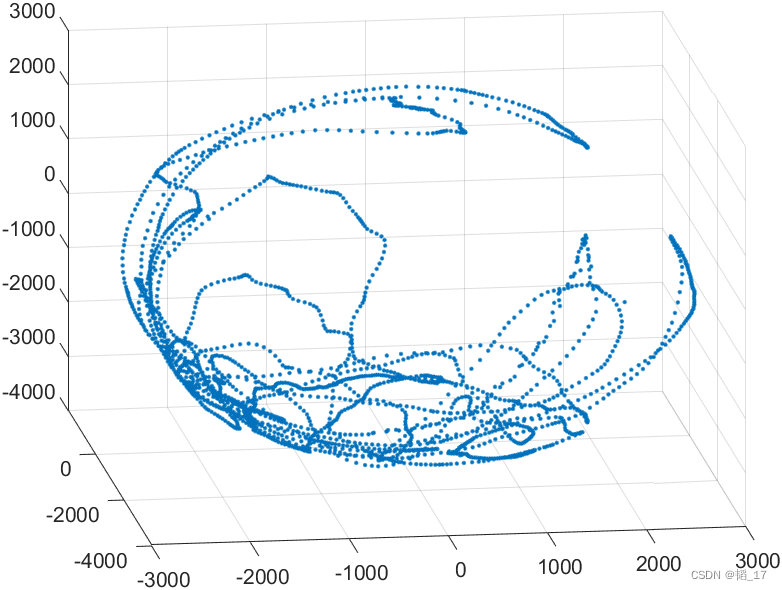
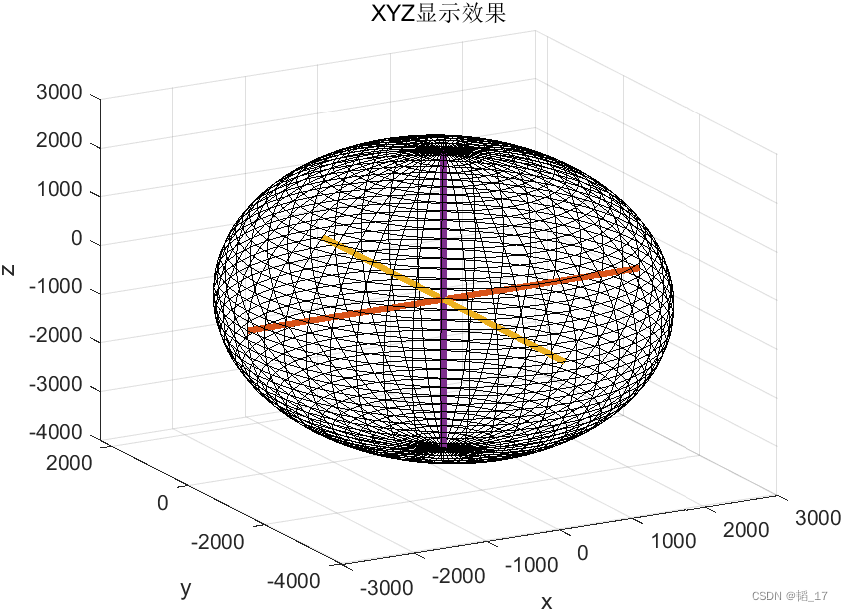
最终效果