ros2机器人常规控制流程
-
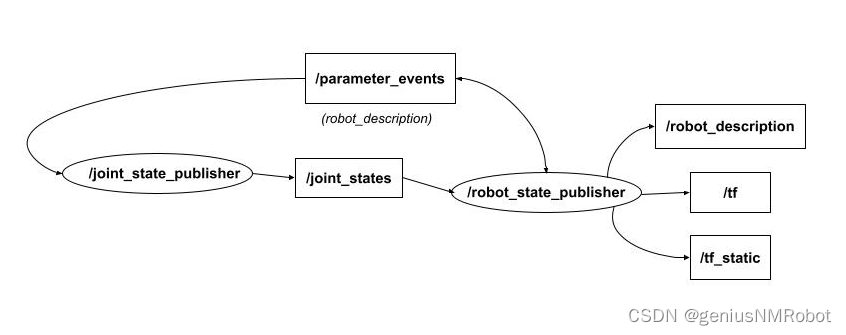
The joint_state_publisher reads the
robot_descriptionparameter from the parameter server, finds all of the non-fixed joints and publishes a JointState message with all those joints defined.也就是说如果我们不需要控制机器人运动,只需要一个节点就可以了:/robot_state_publisher;根本用不到3个节点
-
看吧没有使用joint_state_publisher的图像是这样的,不正常啊,看来必须得有
-
joint_state_publisher_gui = Node(package='joint_state_publisher_gui',executable='joint_state_publisher_gui',name='joint_state_publisher_gui',arguments=[sdf_file],output=['screen']) -
Visualize in RViz and with the help of the
joint_state_publisher_gui, configure your robot model by adjusting joint states and poses using the slider.
See documentation for node API. This functionality is useful during initial development of the model. At this point we have achieved the first aim defined in Setup.