yolov5 deepsort-船舶目标检测+目标跟踪+单目测距+速度测量
目标跟踪是一种计算机视觉技术,通过分析图像或视频数据中的目标,实时追踪目标的位置和运动轨迹。在本文中,我们将详细介绍目标跟踪的原理、方法和应用,并探讨其在各个领域中的潜在价值。
1. 目标跟踪技术的基本原理
目标跟踪技术的基本原理是通过提取目标特征,通过计算机算法实现目标在图像或视频序列中的连续追踪。目标特征可以包括颜色、纹理、形状等方面的信息。基于特征的跟踪方法通常包括卡尔曼滤波器、粒子滤波器等。此外,还有基于深度学习的目标跟踪方法,通过神经网络实现目标的快速准确跟踪。
2. 目标跟踪技术的分类和方法
目标跟踪技术可以根据跟踪的目标类型进行分类,如人体跟踪、车辆跟踪、物体跟踪等。根据跟踪方法的不同,可以分为基于特征的跟踪方法和基于深度学习的跟踪方法。基于特征的跟踪方法包括相关滤波器、稀疏表示、聚集跟踪等。基于深度学习的跟踪方法常使用卷积神经网络进行特征提取和跟踪。
3. 目标跟踪技术的应用领域
目标跟踪技术在许多领域中具有广泛的应用价值。在智能监控领域,目标跟踪可以发现和追踪可疑人物或物品,提高安全性。在交通领域,目标跟踪可以用于车辆跟踪和交通流量监测等应用。在无人驾驶领域,目标跟踪是实现自动驾驶的关键技术之一。此外,目标跟踪还可应用于机器人导航、虚拟现实等领域。
4. 目标跟踪技术的挑战和改进方向
尽管目标跟踪技术已经取得了显著的进展,但仍面临一些挑战。其中之一是复杂背景下的目标跟踪,如目标与背景颜色相似或部分遮挡。另一个挑战是目标丢失和重新跟踪的问题,特别是在快速运动或目标与其他目标相似的情况下。未来的改进方向包括结合多模态信息的跟踪、引入强化学习等技术来提高跟踪精度和鲁棒性。
总结而言,目标跟踪技术是计算机视觉领域中的重要研究方向,具有广泛的应用前景。随着技术的不断发展和改进,目标跟踪将在智能监控、交通、无人驾驶等领域中起到越来越重要的作用,为社会的发展和进步做出积极贡献。
简介
YOLOv5是一种流行的目标检测算法,它是YOLO系列算法的最新版本。YOLOv5采用了一种新的架构,可以在保持高准确性的同时提高检测速度。在本文中,我们将介绍如何使用YOLOv5算法来进行船舶跟踪和测距。
算法流程
首先,我们需要准备一个船舶检测模型。我们可以使用YOLOv5算法对一组带有船舶的图像进行训练,以便模型可以学习如何检测船舶。在训练之后,我们可以使用该模型来检测新图像中的船舶。

一旦我们有了一个船舶检测模型,就可以开始跟踪船舶。我们可以使用跟踪算法,例如Kalman滤波器或卡尔曼滤波器和粒子滤波器,来跟踪检测到的船舶。这些算法可以使用检测到的船舶位置和速度信息来估算船舶的未来位置,并且能够在目标运动模式发生变化时进行自适应。
在跟踪船舶时,我们还可以使用光流算法来估算船舶的速度和方向。光流是一种计算像素在连续帧之间的运动的方法,这可以用来估算船舶的速度和方向。通过将光流算法与跟踪算法结合使用,我们可以更好地跟踪船舶,并估算出船舶的未来位置和速度。
运行demo.py代码
def main():func_status = {}func_status['headpose'] = Nonename = 'demo'det = Detector()cap = cv2.VideoCapture(VIDEO_PATH)fps = int(cap.get(5))print('fps:', fps)t = int(1000/fps)size = NonevideoWriter = Nonewhile True:# try:_, im = cap.read()if im is None:breakresult1 = det.feedCap(im, func_status)result = result1['frame']#object1 = result['list_of_ids']boxes=result1['obj_bboxes']
#########################################curr_x=0curr_y=0if boxes:print("-----------",boxes)print('------------type:',type(boxes))for l in range(len(boxes)):x1, y1, x2, y2, lbl, conf=boxes[l][0],boxes[l][1],boxes[l][2],boxes[l][3],boxes[l][4],boxes[l][5]result_speed = calculate_velocity(curr_x, curr_y, x2, y2, 1, 0.5)/3.6curr_x=x1curr_y =y1print("速度:", result_speed)actual_height=20actual_width=100triangle_height=y2-y1triangle_width=x2-x1focal_length=10distance=calculate_distance(actual_height, actual_width, triangle_height, triangle_width, focal_length)print("di----------s",type(distance))if distance <10 and result_speed>10:color=(0,255,255)result = draw_boxes(result, boxes, identities=None, offset=(0, 0), color=color,distance=distance,speed=result_speed)else:color=(255,0,0)
————————————————
版权声明:本文为CSDN博主「阿利同学」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/ALiLiLiYa/article/details/131741399
最后,我们可以使用摄像头的参数和船舶图像的尺寸来测量船舶的距离。通过计算船舶在图像中的像素大小,然后使用相机参数和船舶的实际大小来计算船舶与相机之间的距离。这可以用于跟踪船舶并估算船舶的远近。
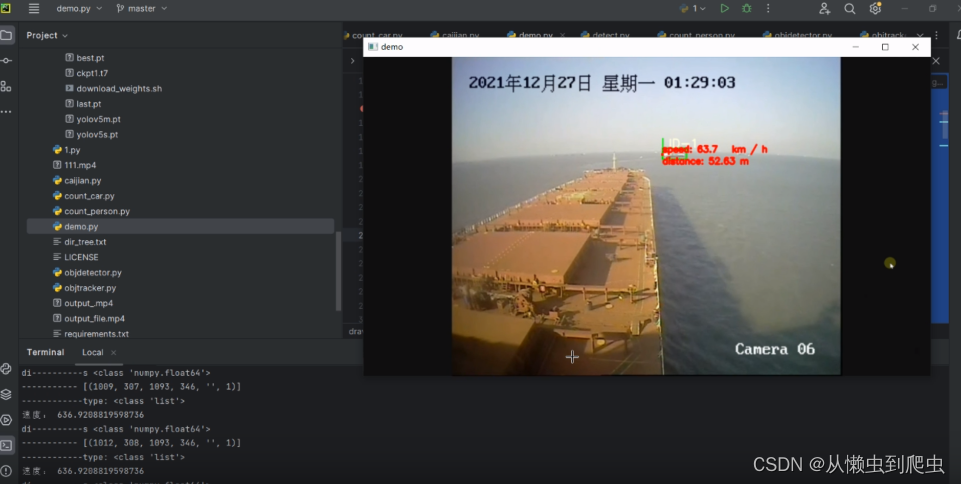
结果
单目标

多目标跟踪
总结
总之,使用YOLOv5算法进行船舶跟踪和测距是一种高效准确的方法。通过训练一个船舶检测模型,并结合跟踪算法和光流算法来跟踪船舶,我们可以估算出船舶的未来位置和速度。然后,使用摄像头的参数和船舶图像的尺寸来测量船舶的距离,我们可以更好地了解船舶的远近。