当前位置: 首页 > news >正文 02基于matlab的卡尔曼滤波 news 2025/7/18 14:21:59 基于matlab的卡尔曼滤波,可更改状态转移方程,控制输入,观测方程,设置生成的信号的噪声标准差,设置状态转移方差Q和观测方差R等参数,程序已调通,需要直接拍下。 查看全文 http://www.lryc.cn/news/260365.html 相关文章: 基础算法(3):排序(3)插入排序 Vue3-18-侦听器watch()、watchEffect() 的基本使用 mysql 5.7.34升级到5.7.44修补漏洞 基于电子密码锁具有掉电存储系统设计 清华大学考研复试上机题之二叉树的遍历 java全栈体系结构-架构师之路(持续更新中) 【C语言】超详解strncpystrncatstrncmpstrerrorperror的使⽤和模拟实现 【Spring Boot 】Spring Boot 常用配置总结 Day60力扣打卡 Axure的动态图使用以及说明 力扣 | 437. 路径总和 III 如何部署自己的服务渲染页面为Pdf文档 常用的调试方法(段错误产生原因) [云原生] Docker 入门指南:镜像、容器、卷和网络解析 机器学习-聚类问题 leetcode9.回文数java解法 图论专栏一《图的基础知识》 得帆云为玉柴打造CRM售后服务管理系统,实现服务全过程管理|基于得帆云低代码的CRM案例系列 智能优化算法应用:基于蝠鲼觅食算法3D无线传感器网络(WSN)覆盖优化 - 附代码 vue2 以及 vue3 自定义组件使用 v-model使用默认值以及自定义事件 《PCL多线程加速处理》-滤波-统计滤波 插入排序——直接插入排序和希尔排序(C语言实现) 【Linux系统化学习】进程地址空间 | 虚拟地址和物理地址的关系 Navicat 技术指引 | 适用于 GaussDB 分布式的模型功能 四十五、Redis主从 Spring源码学习一 小红书种草和抖音传播区别是什么? 论文阅读《Parameterized Cost Volume for Stereo Matching》 解决nuxt3中vue3生命周期钩子onMounted不执行的问题 Win32 HIWORD和LOWORD宏学习
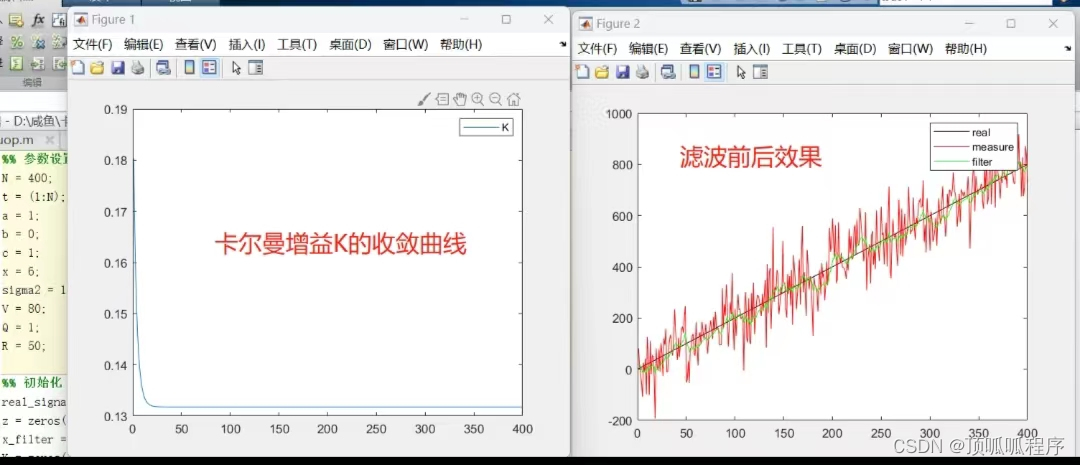
基于matlab的卡尔曼滤波,可更改状态转移方程,控制输入,观测方程,设置生成的信号的噪声标准差,设置状态转移方差Q和观测方差R等参数,程序已调通,需要直接拍下。 查看全文 http://www.lryc.cn/news/260365.html 相关文章: 基础算法(3):排序(3)插入排序 Vue3-18-侦听器watch()、watchEffect() 的基本使用 mysql 5.7.34升级到5.7.44修补漏洞 基于电子密码锁具有掉电存储系统设计 清华大学考研复试上机题之二叉树的遍历 java全栈体系结构-架构师之路(持续更新中) 【C语言】超详解strncpystrncatstrncmpstrerrorperror的使⽤和模拟实现 【Spring Boot 】Spring Boot 常用配置总结 Day60力扣打卡 Axure的动态图使用以及说明 力扣 | 437. 路径总和 III 如何部署自己的服务渲染页面为Pdf文档 常用的调试方法(段错误产生原因) [云原生] Docker 入门指南:镜像、容器、卷和网络解析 机器学习-聚类问题 leetcode9.回文数java解法 图论专栏一《图的基础知识》 得帆云为玉柴打造CRM售后服务管理系统,实现服务全过程管理|基于得帆云低代码的CRM案例系列 智能优化算法应用:基于蝠鲼觅食算法3D无线传感器网络(WSN)覆盖优化 - 附代码 vue2 以及 vue3 自定义组件使用 v-model使用默认值以及自定义事件 《PCL多线程加速处理》-滤波-统计滤波 插入排序——直接插入排序和希尔排序(C语言实现) 【Linux系统化学习】进程地址空间 | 虚拟地址和物理地址的关系 Navicat 技术指引 | 适用于 GaussDB 分布式的模型功能 四十五、Redis主从 Spring源码学习一 小红书种草和抖音传播区别是什么? 论文阅读《Parameterized Cost Volume for Stereo Matching》 解决nuxt3中vue3生命周期钩子onMounted不执行的问题 Win32 HIWORD和LOWORD宏学习