PaddleClas学习3——使用PPLCNet模型对车辆朝向进行识别(c++)
使用PPLCNet模型对车辆朝向进行识别
- 1 准备环境
- 2 准备模型
- 2.1 模型导出
- 2.2 修改配置文件
- 3 编译
- 3.1 使用CMake生成项目文件
- 3.2 编译
- 3.3 执行
- 3.4 添加后处理程序
- 3.4.1 postprocess.h
- 3.4.2 postprocess.cpp
- 3.4.3 在cls.h中添加函数声明
- 3.4.4 在cls.cpp中添加函数定义
- 3.4.5 在main.cpp中调用
- 4 模型预测
- 4.1 测试结果
- 4.2 与python预测结果对比
1 准备环境
参考上一篇:Windows PaddleSeg c++部署
2 准备模型
2.1 模型导出
对上一篇 使用PPLCNet模型对车辆朝向进行识别 训练得到模型进行转换。将该模型转为 inference 模型只需运行如下命令:
python tools\export_model.py -c .\ppcls\configs\PULC\vehicle_attribute\PPLCNet_x1_0.yaml -o Global.pretrained_model=output/PPLCNet_x1_0/best_model -o Global.save_inference_dir=./deploy/models/class_vehicle_attribute_infer
图2.1 训练得到的模型
图2.2 导出的模型
2.2 修改配置文件
deploy/configs/PULC/vehicle_attribute/inference_vehicle_attribute.yaml
修改Global下的infer_imgs和inference_model_dir。
Global:infer_imgs: "./images/PULC/vehicle_attribute/0002_c002_00030670_0.jpg"inference_model_dir: "./models/class_vehicle_attribute_infer"batch_size: 1use_gpu: Trueenable_mkldnn: Truecpu_num_threads: 10#benchmark: Falseenable_benchmark: Falseuse_fp16: Falseir_optim: Trueuse_tensorrt: Falsegpu_mem: 8000enable_profile: False
3 编译
工程整体目录结构如下:
G:/paddle/c++├── paddle_inference
G:/paddle├── PaddleClas-release-2.5
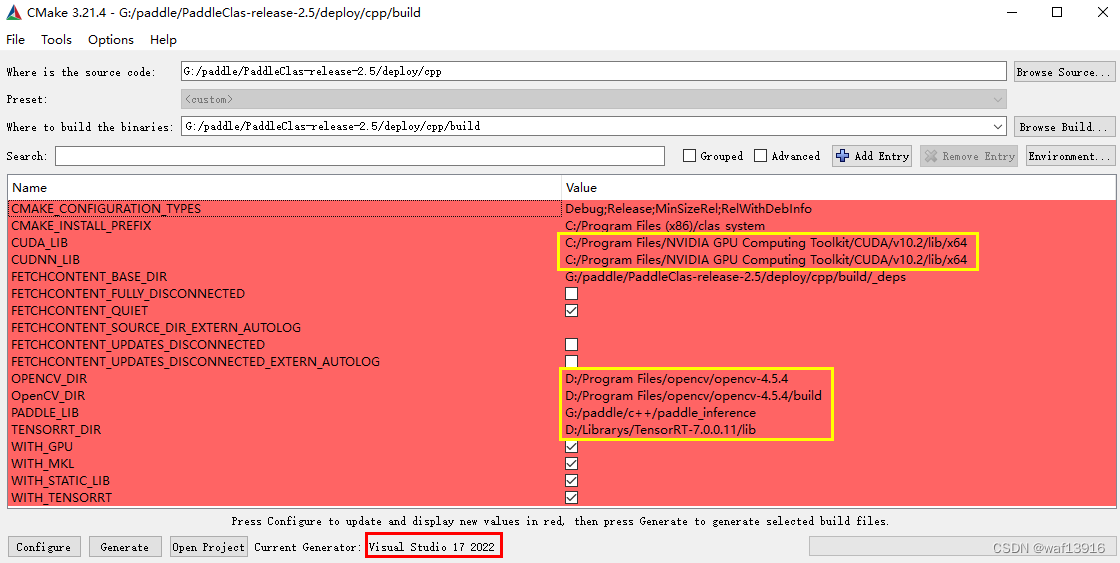
3.1 使用CMake生成项目文件
3.2 编译
用Visual Studio 2022打开cpp\build\clas_system.sln,将编译模式设置为Release,点击生成->生成解决方案,在cpp\build\Release文件夹内生成clas_system.exe。
3.3 执行
进入到build/Release目录下,将准备的模型和图片放到clas_system.exe同级目录,build/Release目录结构如下:
Release
├──clas_system.exe # 可执行文件
├──images # 测试图片├── PULC├── vehicle_attribute├── 0002_c002_00030670_0.jpg
├──configs # 配置文件├── PULC├── vehicle_attribute├── inference_vehicle_attribute.yaml
├──models # 推理用到的模型├── class_vehicle_attribute_infer├── inference.pdmodel # 预测模型的拓扑结构文件├── inference.pdiparams # 预测模型的权重文件└── inference.pdiparams.info # 参数额外信息,一般无需关注
├──*.dll # dll文件
3.4 添加后处理程序
3.4.1 postprocess.h
// postprocess.h
#include <iostream>
#include <vector>namespace PaddleClas {class VehicleAttribute {public:float color_threshold = 0.5;float type_threshold = 0.5;float direction_threshold = 0.5;std::vector<std::string> color_list = { "yellow", "orange", "green", "gray", "red", "blue", "white","golden", "brown", "black" };std::vector<std::string> type_list = { "sedan", "suv", "van", "hatchback", "mpv", "pickup", "bus","truck", "estate" };std::vector<std::string> direction_list = { "forward", "sideward", "backward" };std::string run(std::vector<float>& pred_data);};
}
3.4.2 postprocess.cpp
// postprocess.cpp#include "include/postprocess.h"
#include <string>
namespace PaddleClas {std::string VehicleAttribute::run(std::vector<float>& pred_data) {int color_num = 10;int type_num = 9;int direction_num = 3;int index_color = std::distance(&pred_data[0], std::max_element(&pred_data[0