ROS vscode使用基本配置
1、创建ros工作空间
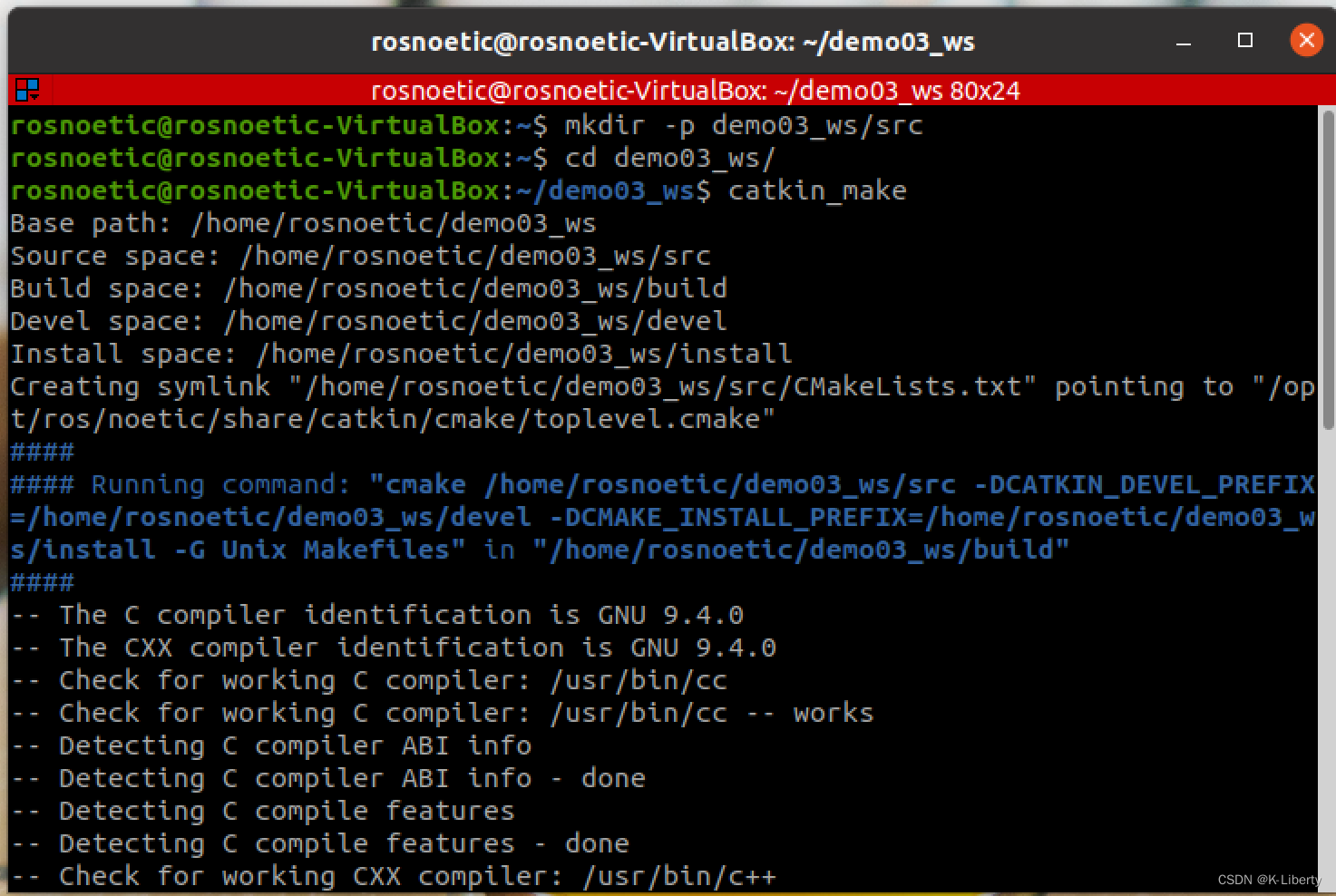
2、启动 vscode
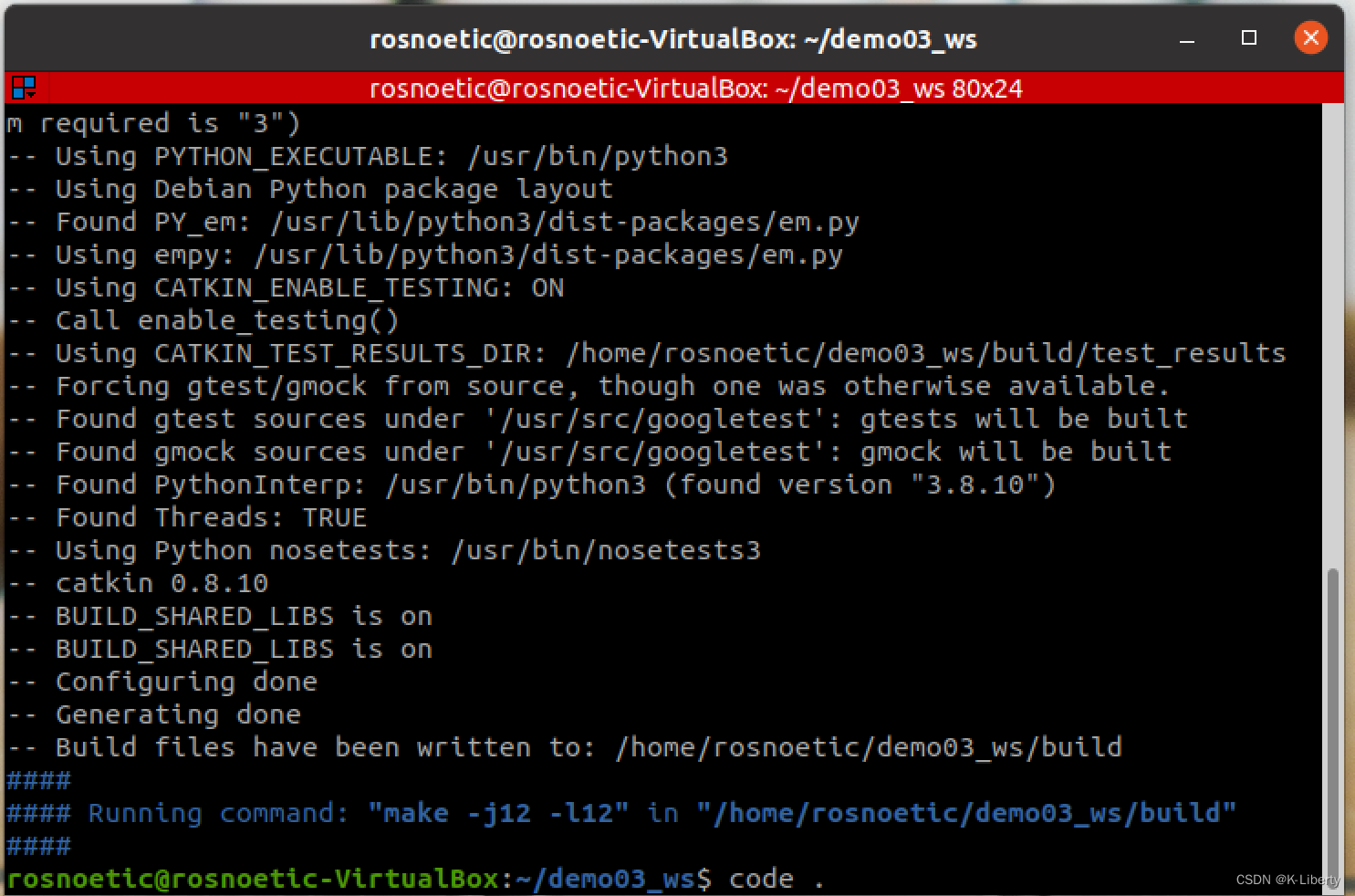
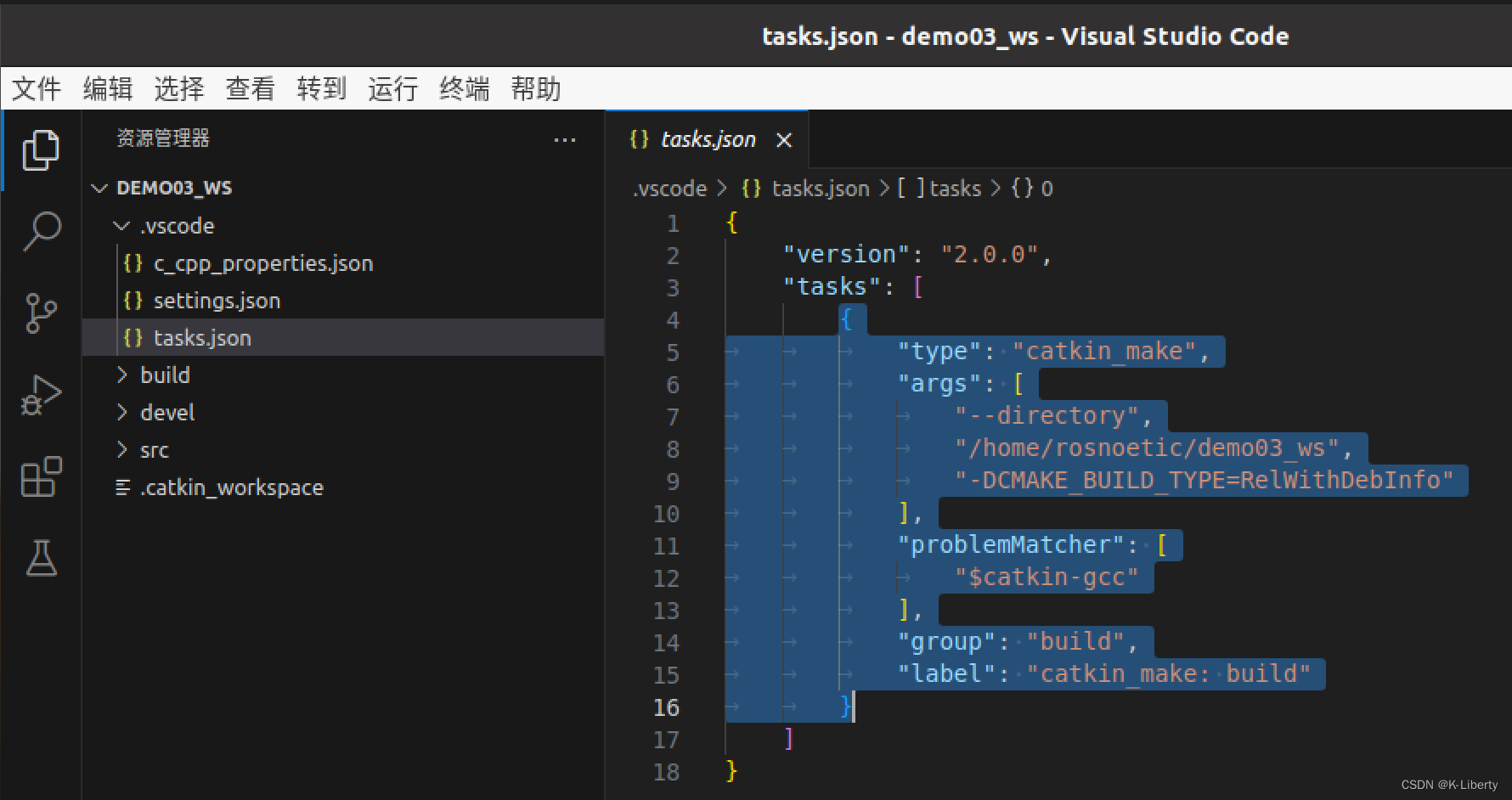
3、vscode 中编译 ros
ctrl + shift + B 调用编译,选择:catkin_make:build
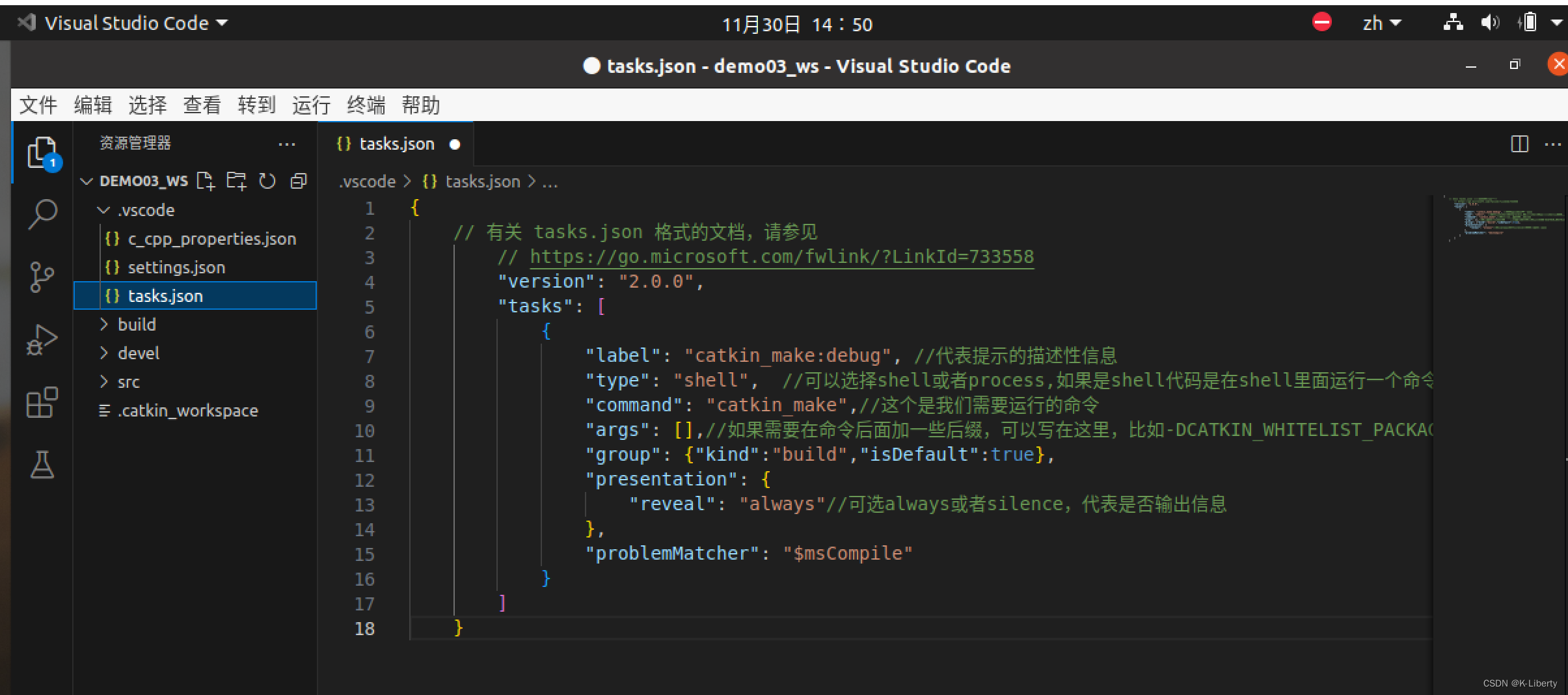
修改.vscode/tasks.json 文件
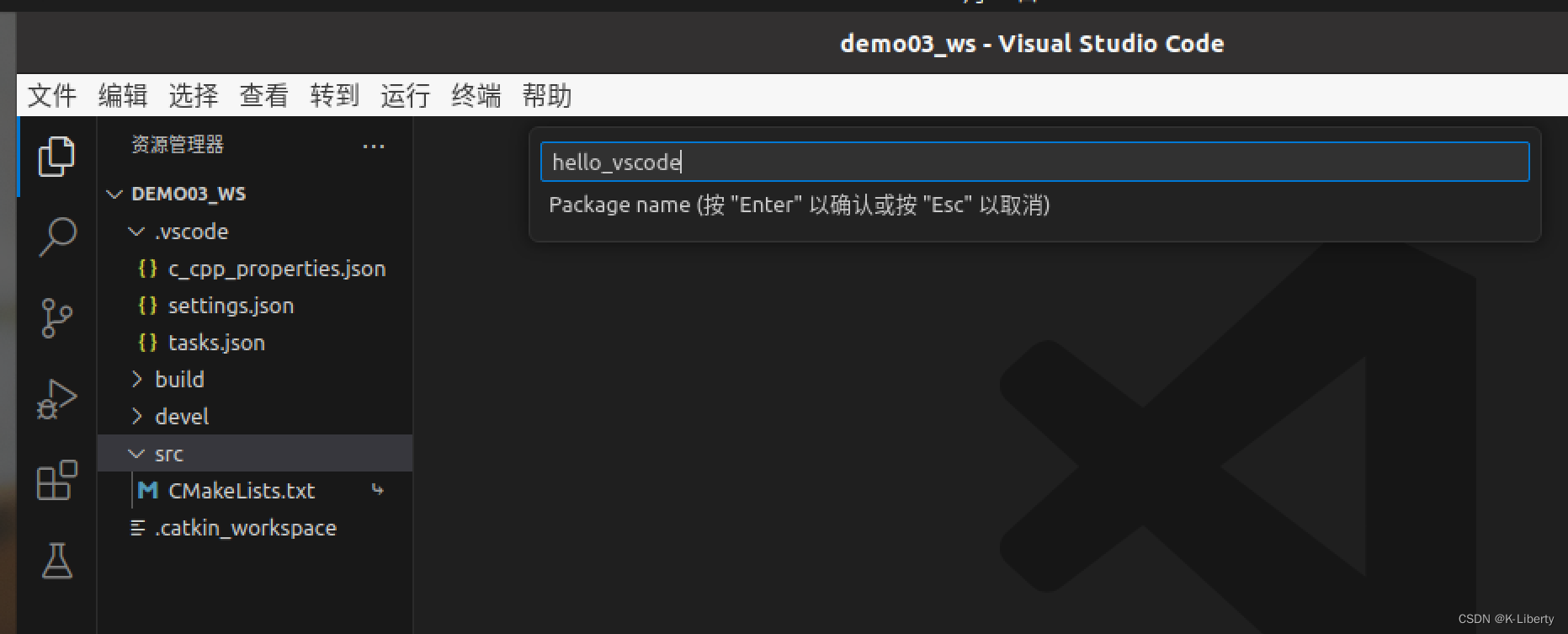
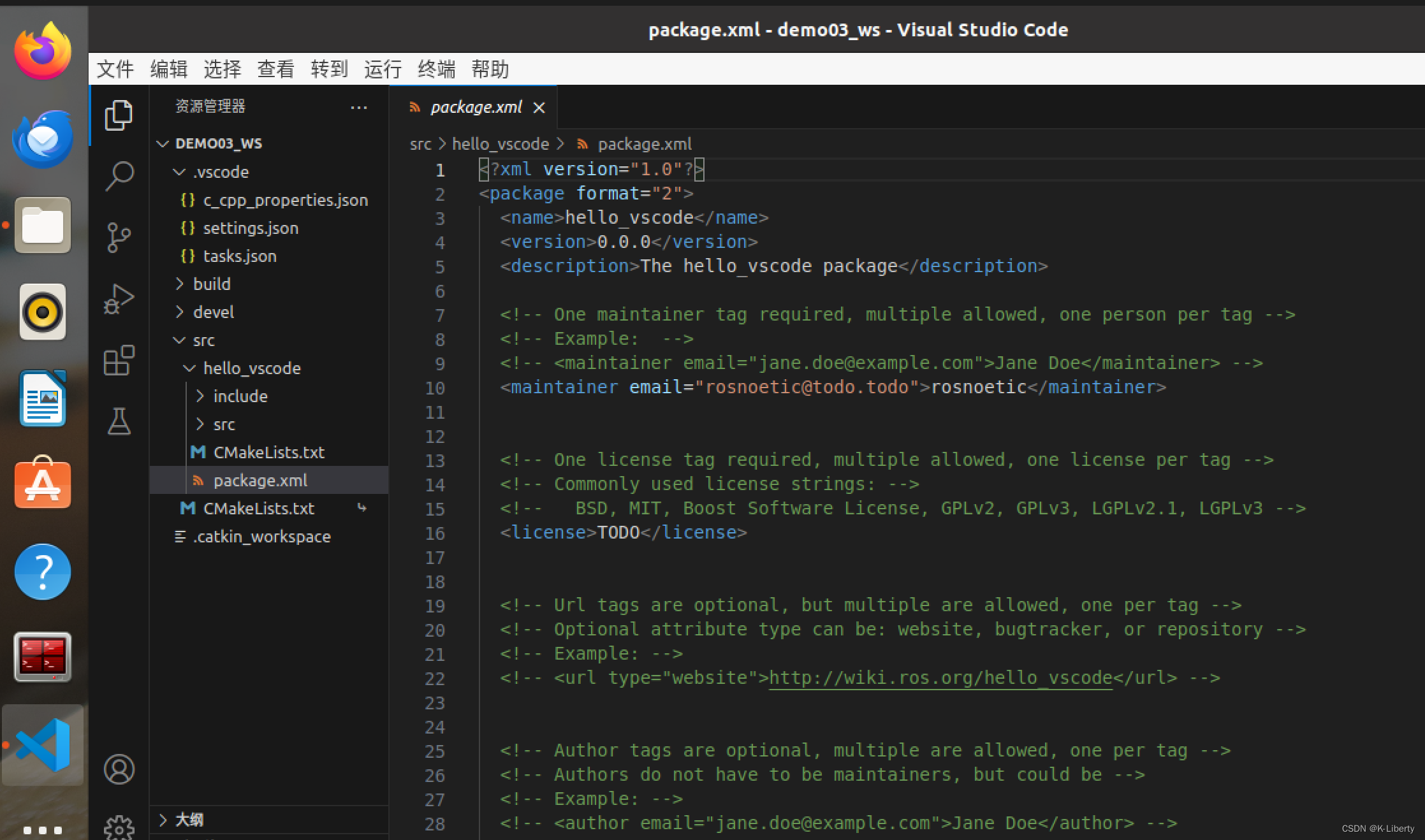
4、 创建 ROS 功能包
选定 src ---> create catkin package 依次设置包名、添加依赖


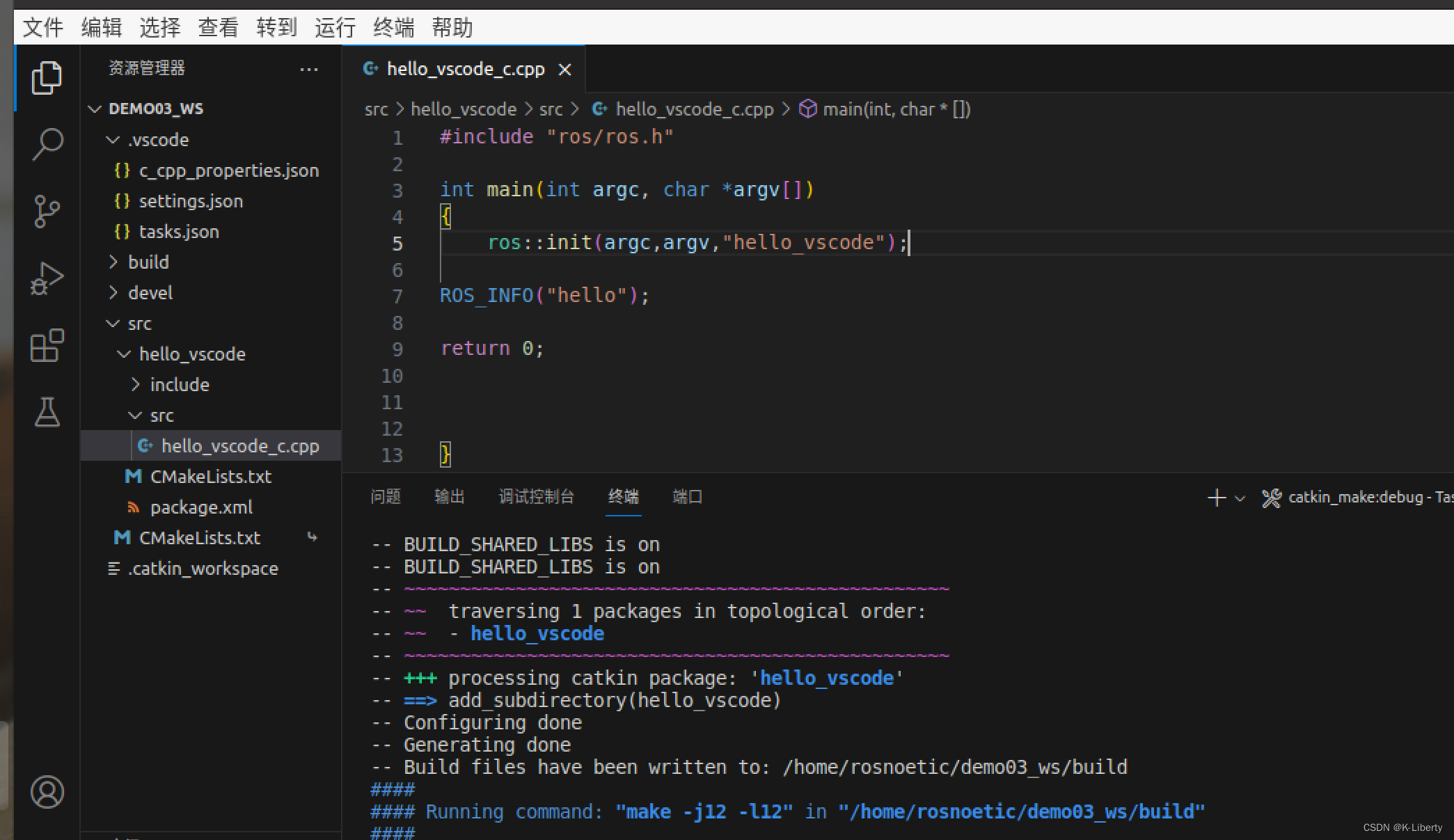
5、C++ 实现
在功能包的 src 下新建 cpp 文件
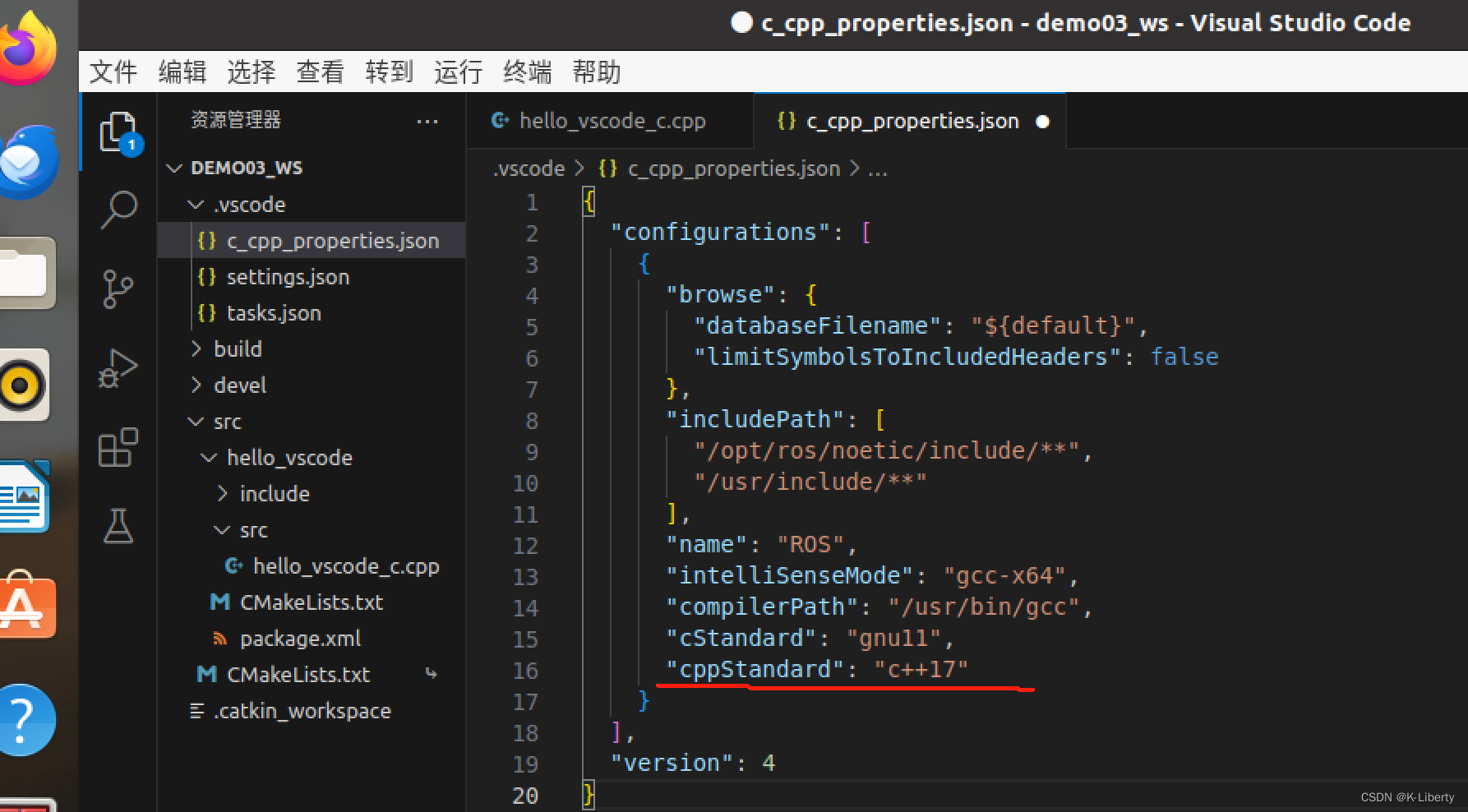
修改 .vscode/c_cpp_properties.json
设置 "cppStandard": "c++17"
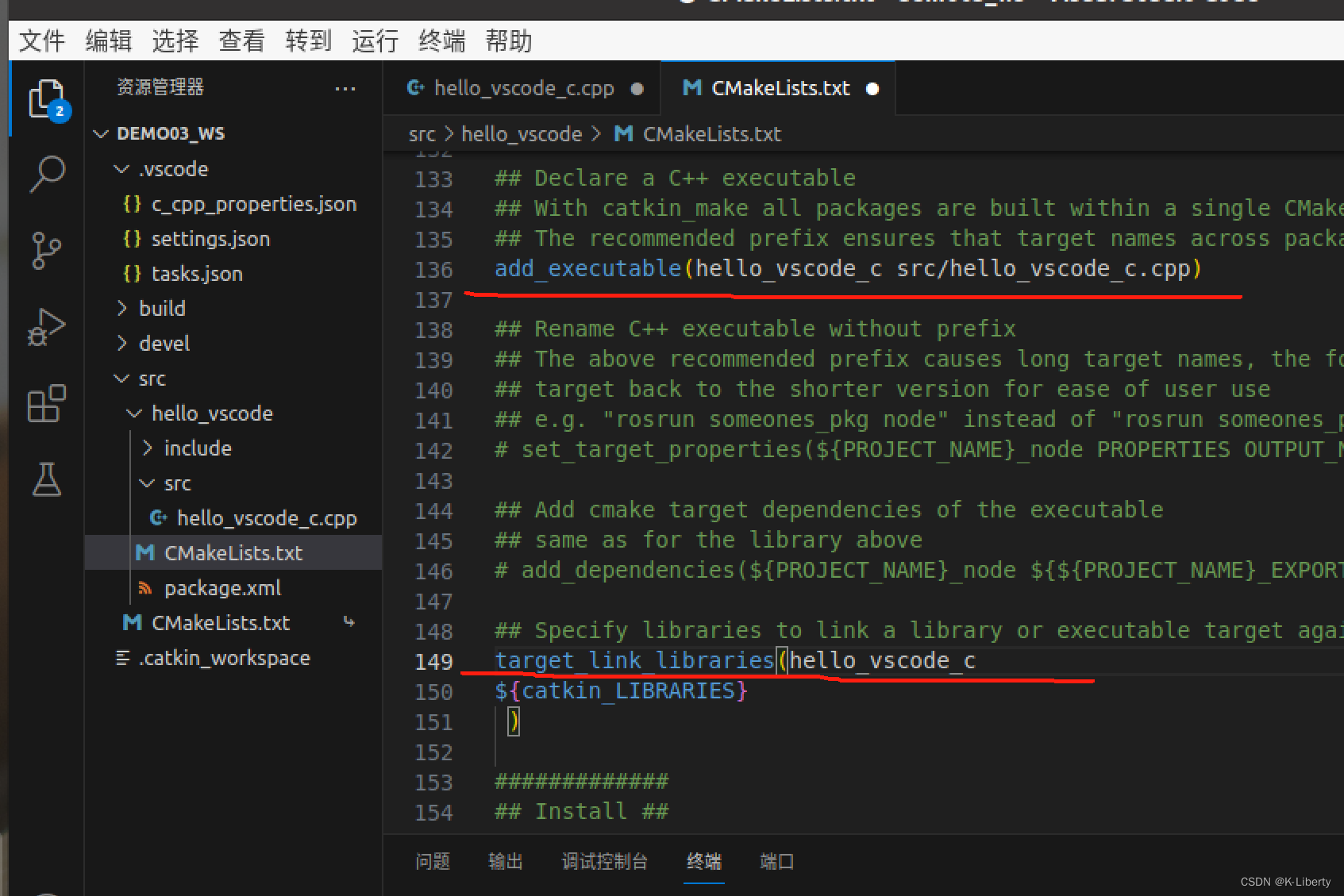
6、 配置 CMakeLists.txt
7、 编译执行
编译: ctrl + shift + B
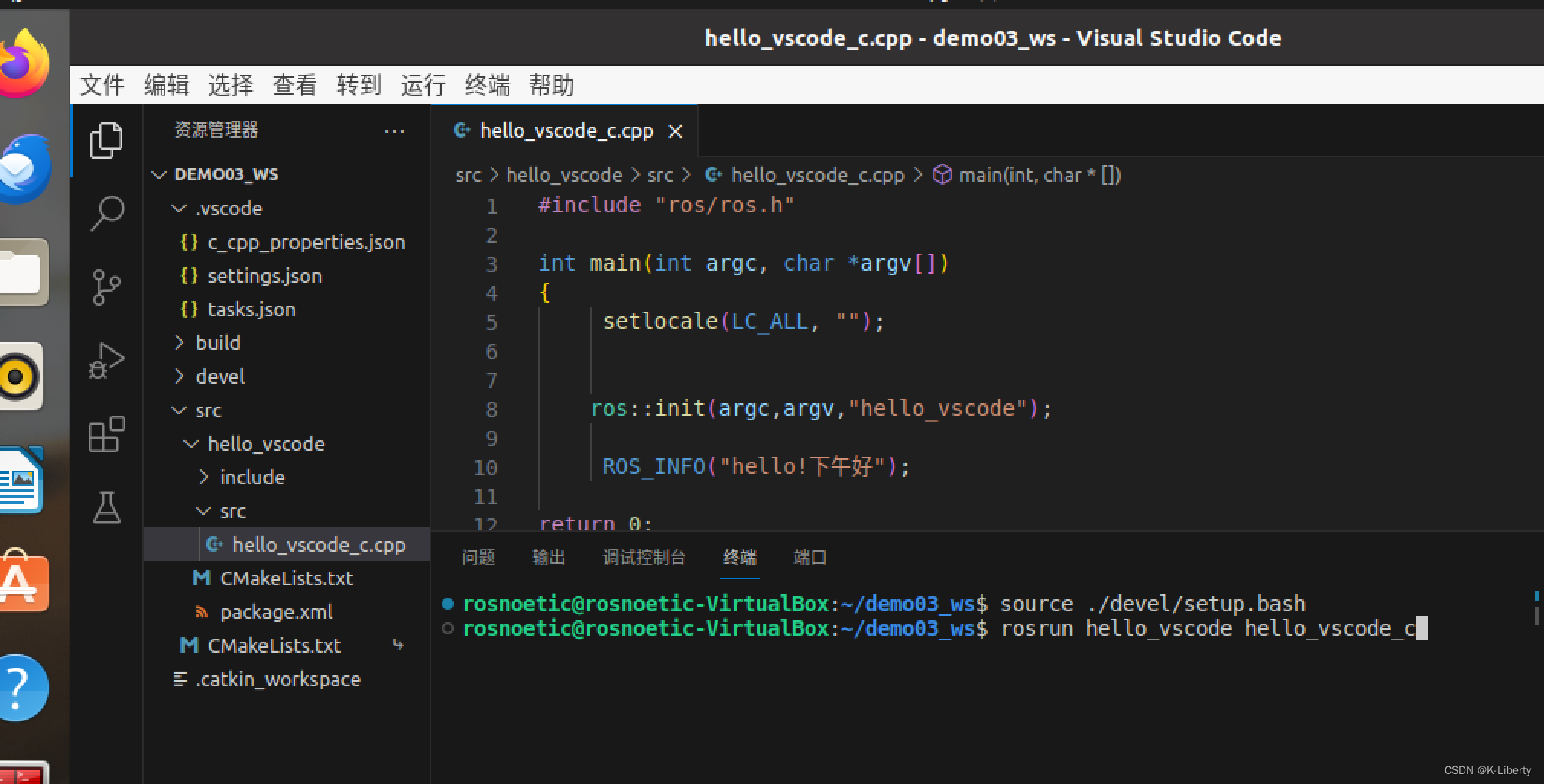
执行: 和之前一致,在 VScode 中添加终端,执行:source ./devel/setup.bash
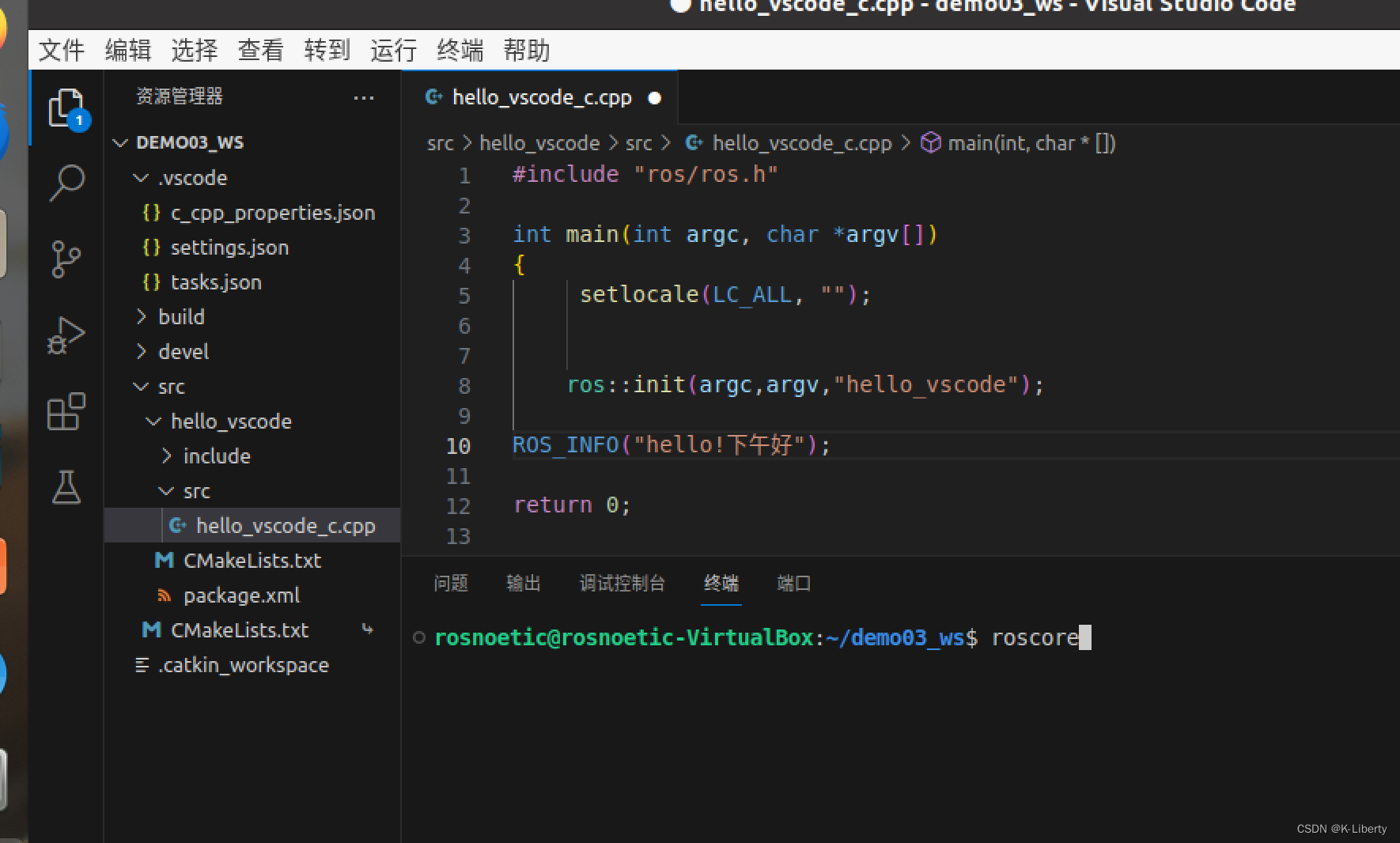
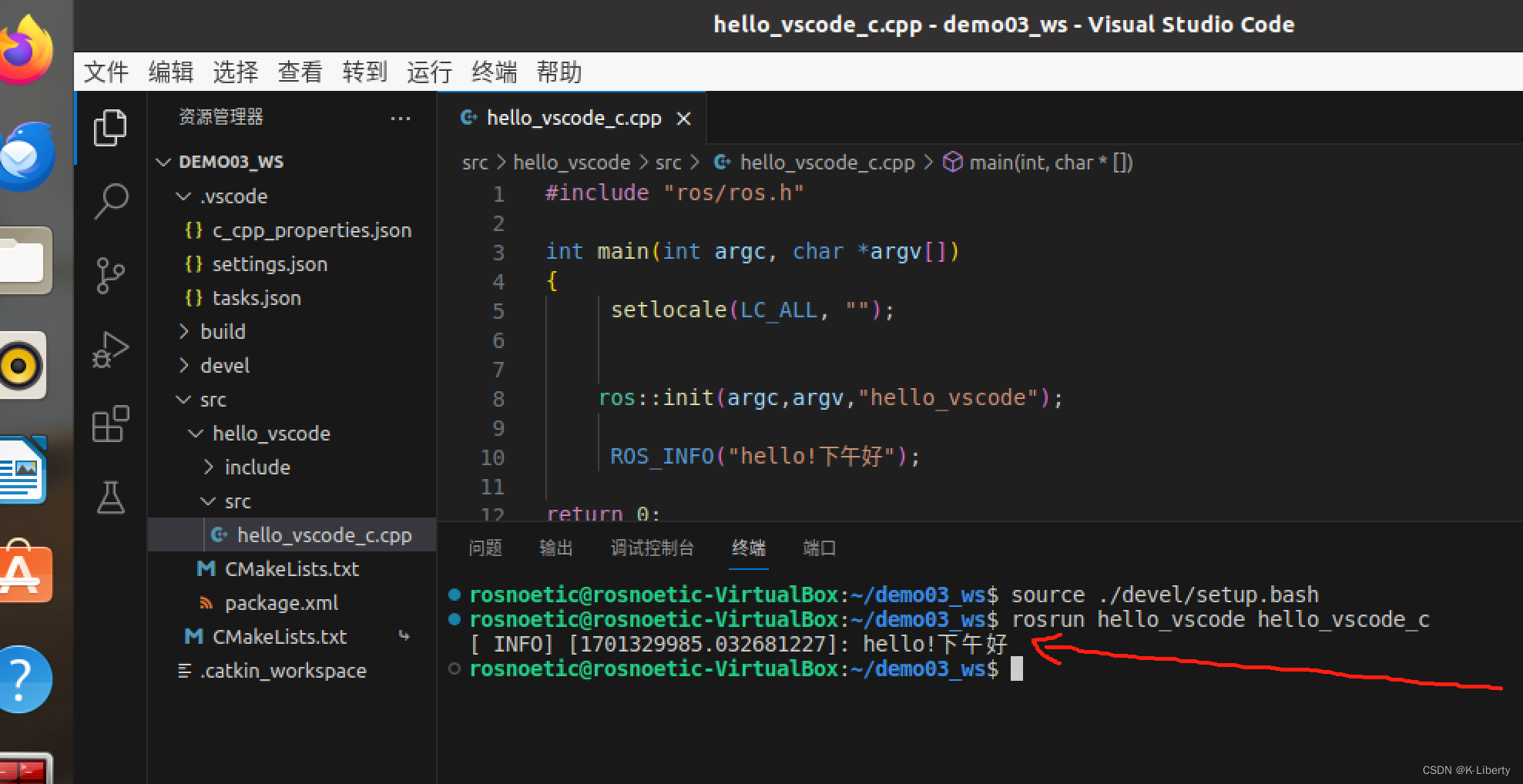
注意:当ROS__INFO 终端输出有中文时,会出现乱码
解决办法:在函数开头加入一行代码 setlocale(LC_ALL, "");