STM32之定时器--超声波测距
1、模块介绍
型号:HC-SR04

超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离。
2、超声波模块的使用方法
- 怎么让它发送波
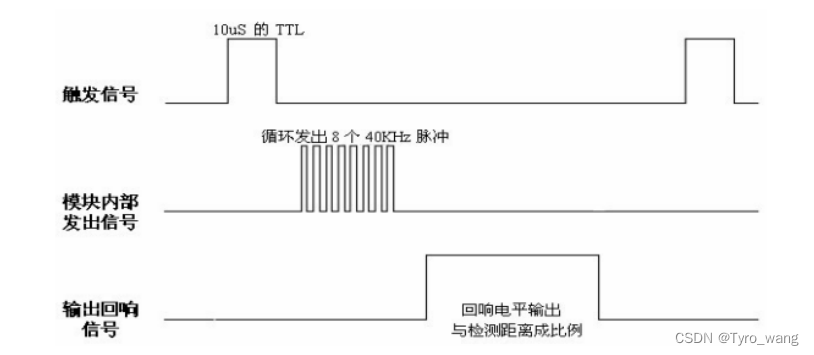
Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间
Echo引脚维持高电平的时间!
波发出去的那一下,开始启动定时器
波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离
距离 = 速度 (340m/s)* 时间/2
3、 超声波时序图
4、编程实现
需求:使用超声波测距,当手离传感器距离小于5cm时,LED1点亮,否则保持不亮状态。
codeMX配置
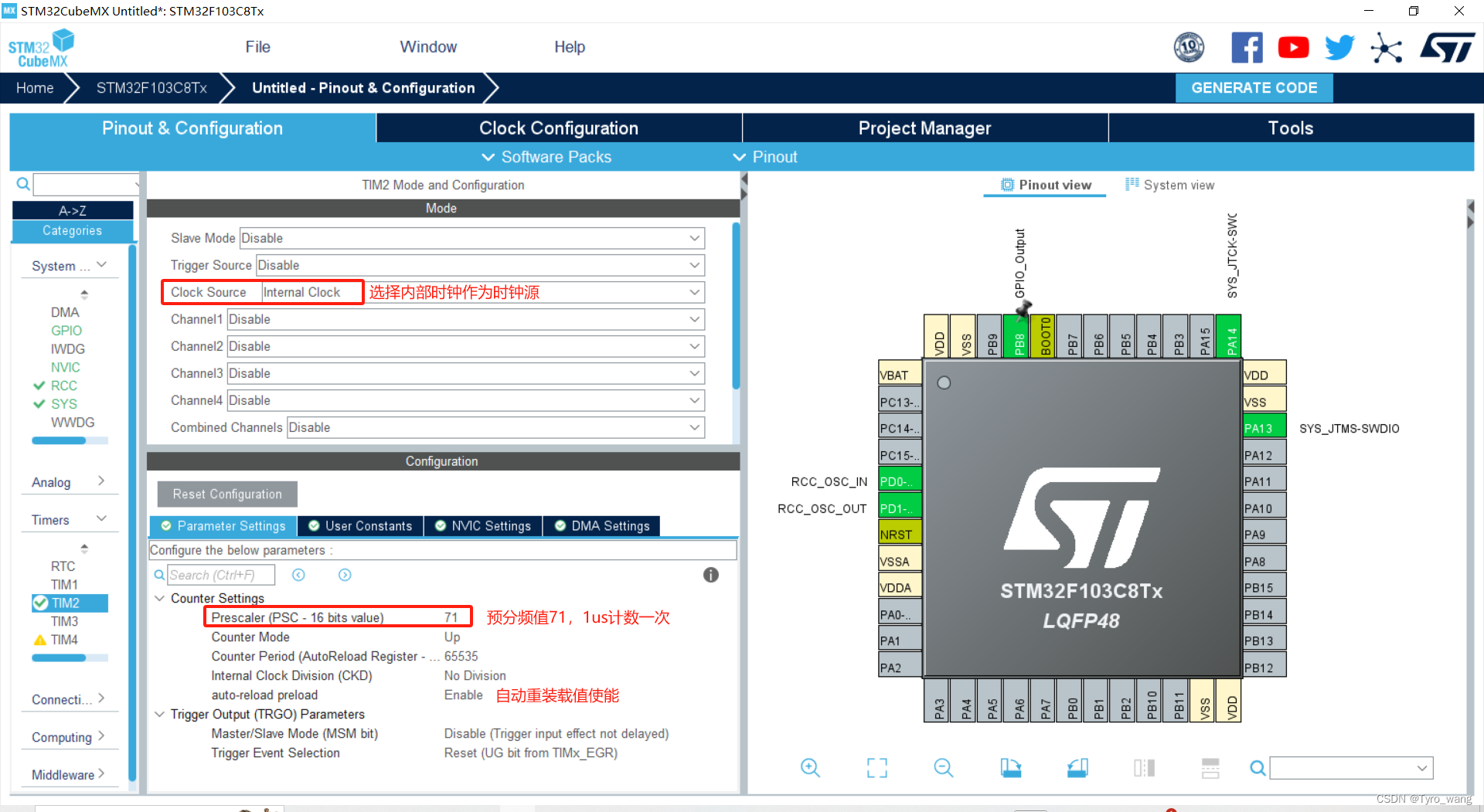
定时器配置:使用 TIM2 ,只用作计数功能,不用作定时。 将 PSC 配置为71,则计数 1 次代表 1us 。
这里因为涉及到us级的延时,而我们的HAL_Delay()延迟函数时ms级别的所以在这里用不了。需要我们使用定时器编写一个us级的延时函数
使用到的HAL库函数
1.启用TIM外设(启动定时器计数)
__HAL_TIM_ENABLE(__HANDLE__)
参数:定时器的句柄
2.在运行时设置TIM计数器寄存器值(设置计数器的值)
#define __HAL_TIM_SetCounter __HAL_TIM_SET_COUNTER
#define __HAL_TIM_SET_COUNTER(__HANDLE__, __COUNTER__)
参数1:定时器的句柄
参数2:指定计数器寄存器的新值
3.在运行时获取TIM计数器寄存器值
#define __HAL_TIM_GetCounter __HAL_TIM_GET_COUNTER
#define __HAL_TIM_GET_COUNTER(__HANDLE__)
参数:定时器的句柄
返回值:计时器计数器寄存器的值 (TIMx_CNT)
4.禁用TIM外设(关闭定时器计数)
#define __HAL_TIM_DISABLE(__HANDLE__)
参数:定时器的句柄
5.启动TIM Base生成(启动定时器)
HAL_StatusTypeDef HAL_TIM_Base_Start(TIM_HandleTypeDef *htim)
参数:定时器的句柄
6.停止生成TIM Base。(停止定时器)
HAL_StatusTypeDef HAL_TIM_Base_Stop(TIM_HandleTypeDef *htim)
参数:定时器的句柄
__HAL_TIM_ENABLE(&htim2)与 HAL_TIM_Base_Start(&htim2)两个库函数有什么区别
代码实现
延时函数代码:
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}main函数里面的代码
while (1){//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);//2. echo由低电平跳转到高电平,表示开始发送波while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET);//波发出去的那一下,开始启动定时器HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//测量之前先把次数置零//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_SET);//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间count = __HAL_TIM_GetCounter(&htim2);//获取次数dis = (0.017 * count) / 2;//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)if(dis < 10){HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);HAL_Delay(1000);}else{HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);}//每500毫秒测试一次距离HAL_Delay(500);}